open genie
1.0.0
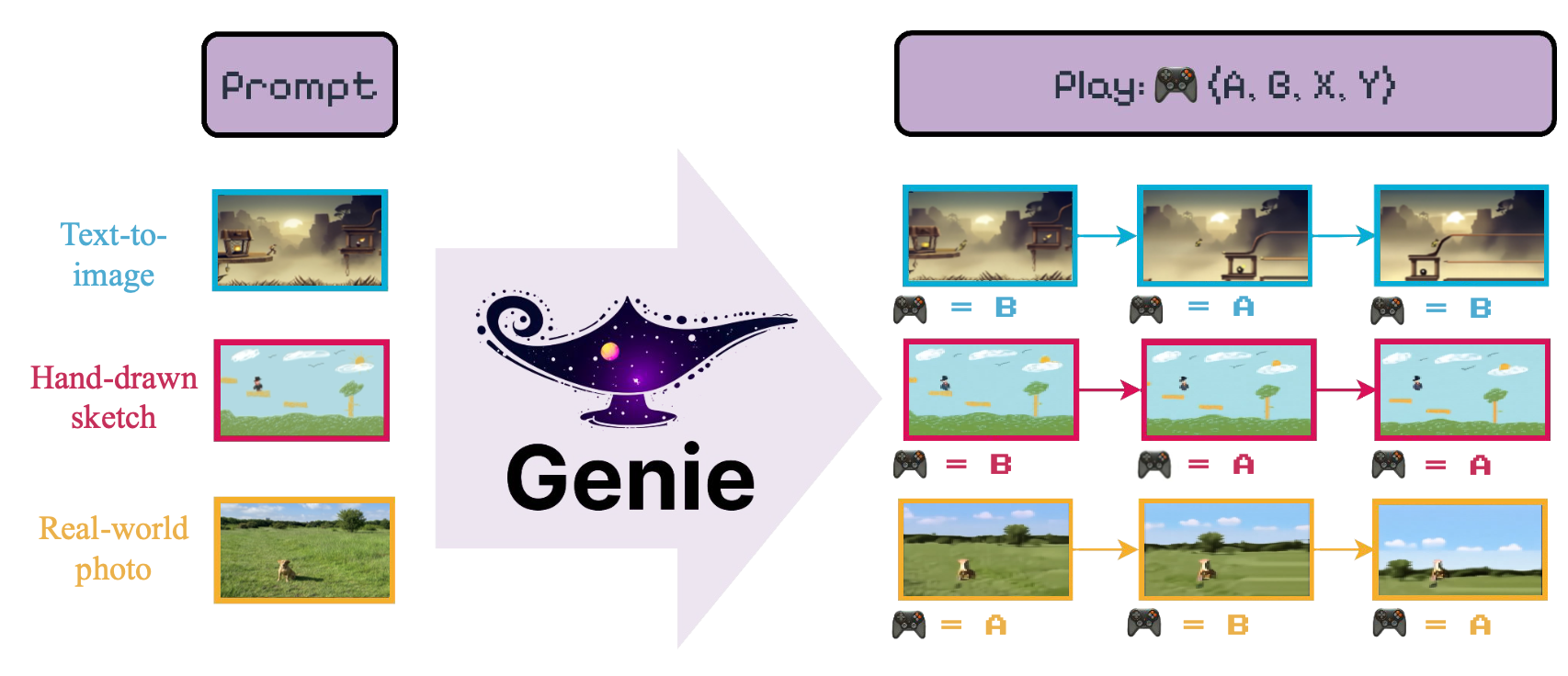
Este repositorio contiene la implementación no oficial de genio: entornos interactivos generativos Bruce et al. (2024) según lo introducido por Google Deepmind.
El objetivo del modelo es introducir "[...] el primer entorno interactivo generativo entrenado de manera no supervisada de videos de Internet no marcados".
Proporcionamos una interfaz LightningCLI para entrenar fácilmente los varios componentes del modelo Genie . En particular, para entrenar el VideoTokenizer uno debe ejecutar lo siguiente
python tokenizer.py train -config < path_to_conf_file > Para entrenar tanto el modelo LatentAction como Dynamics (el uso a su vez aprovecharía un VideoTokenizer totalmente capacitado), se puede volver a ejecutar simplemente: simplemente se puede ejecutar:
python genie.py train -config < path_to_conf_file > Proporcionamos archivos de configuración de ejemplo en la carpeta config .
En las siguientes secciones proporcionamos códigos de ejemplo para los bloques de construcción principales que juntos forman el módulo de genio general.
Genie se basa en un VideoTokenizer que digiere videos de entrada y a través de su encode : las habilidades quantize los convierten en tokens discretos. Estos tokens son lo que usa el módulo Dynamics para manipular el espacio de video latente . El módulo VideoTokenizer acepta varios parámetros para una amplia personalización, aquí hay un código de ejemplo para un uso típico:
from genie import VideoTokenizer
# Pre-assembled description of MagViT2
# encoder & decoder architecture
from genie import MAGVIT2_ENC_DESC
from genie import MAGVIT2_DEC_DESC
tokenizer = VideoTokenizer (
# We can pass an arbitrary description of the
# encoder architecture, see genie.tokenizer.get_module
# to see which module are supported
enc_desc = (
'causal' , { # A CausalConv3d layer
'in_channels' : 3 ,
'out_channels' : 64 ,
'kernel_size' : 3 ,
}),
( 'residual' , { # Residual Block
'in_channels' : 64 ,
'kernel_size' : 3 ,
'downsample' : ( 1 , 2 ), # Optional down-scaling (time, space)
'use_causal' : True , # Using causal padding
'use_blur' : True , # Using blur-pooling
}),
( 'residual' , {
'in_channels' : 64 ,
'out_channels' : 128 , # Output channels can be different
}),
( 'residual' , {
'n_rep' : 2 , # We can repeat this block N-times
'in_channels' : 128 ,
}),
( 'residual' , {
'in_channels' : 128 ,
'out_channels' : 256 , # We can mix different output channels...
'kernel_size' : 3 ,
'downsample' : 2 , # ...with down-sampling (here time=space=2)
'use_causal' : True ,
}),
( 'proj_out' , { # Output project to quantization module
'in_channels' : 256 ,
'out_channels' : 18 ,
'num_groups' : 8 ,
'kernel_size' : 3 ,
}),
# Save time, use a pre-made configuration!
dec_desc = MAGVIT2_DEC_DESC ,
# Description of GAN discriminator
disc_kwargs = dict (
# Discriminator parameters
inp_size = ( 64 , 64 ), # Size of input frames
model_dim = 64 ,
dim_mults = ( 1 , 2 , 4 ), # Channel multipliers
down_step = ( None , 2 , 2 ), # Down-sampling steps
inp_channels = 3 ,
kernel_size = 3 ,
num_groups = 8 ,
act_fn = 'leaky' , # Use LeakyReLU as activation function
use_blur = True , # Use BlurPooling for down-sampling
use_attn = True , # Discriminator can have spatial attention
num_heads = 4 , # Number of (spatial) attention heads
dim_head = 32 , # Dimension of each spatial attention heads
),
# Keyword for the LFQ module
d_codebook = 18 , # Codebook dimension, should match encoder output channels
n_codebook = 1 , # Support for multiple codebooks
lfq_bias = True ,
lfq_frac_sample = 1. ,
lfq_commit_weight = 0.25 ,
lfq_entropy_weight = 0.1 ,
lfq_diversity_weight = 1. ,
# Keyword for the different loss
perceptual_model = 'vgg16' , # We pick VGG-16 for perceptual loss
# Which layer should we record perceptual features from
perc_feat_layers = ( 'features.6' , 'features.13' , 'features.18' , 'features.25' ),
gan_discriminate = 'frames' , # GAN discriminator looks at individual frames
gan_frames_per_batch = 4 , # How many frames to extract from each video to use for GAN
gan_loss_weight = 1. ,
perc_loss_weight = 1. ,
quant_loss_weight = 1. ,
)
batch_size = 4
num_channels = 3
num_frames = 16
img_h , img_w = 64 , 64
# Example video tensor
mock_video = torch . randn (
batch_size ,
num_channels ,
num_frames ,
img_h ,
img_w
)
# Tokenize input video
tokens , idxs = tokenizer . tokenize ( mock_video )
# Tokenized video has shape:
# (batch_size, d_codebook, num_frames // down_time, H // down_space, W // down_space)
# To decode the video from tokens use:
rec_video = tokenizer . decode ( tokens )
# To train the tokenizer (do many! times)
loss , aux_losses = tokenizer ( mock_video )
loss . backward () Genie implementa un modelo LatentAction cuya única tarea es formalizar un libro de códigos (discreto) de acciones latentes. Este libro de códigos es pequeño por diseño para fomentar acciones interpretables (como MOVE_RIGHT ). Para entrenar dicho libro de códigos, el modelo LatentAction se construye como un modelo VQ-VAE , donde el codificador ingiere los marcos de video (píxeles) y produce acciones (cuantificadas) como latentes. El decodificador luego ingiere el historial de cuadros anterior y la acción actual para predecir el siguiente cuadro. Tanto el codificador como el decodificador se descartan en el momento de la inferencia, ya que el usuario proporciona la acción.
El modelo LatentAction sigue un diseño similar al VideoTokenizer , donde las arquitecturas del codificador/decodificador se pueden especificar a través de un Blueprint . Aquí hay un código de ejemplo para resaltar los componentes centrales:
from genie import LatentAction
from genie import LATENT_ACT_ENC
model = LatentAction (
# Use a pre-made configuration...
enc_desc = LATENT_ACT_ENC ,
# ...Or specify a brand-new one
dec_desc = (
# Latent Action uses space-time transformer
( 'space-time_attn' , {
'n_rep' : 2 ,
'n_embd' : 256 ,
'n_head' : 4 ,
'd_head' : 16 ,
'has_ext' : True ,
# Decoder uses latent action as external
# conditioning for decoding!
'time_attn_kw' : { 'key_dim' : 8 },
}),
# But we can also down/up-sample to manage resources
# NOTE: Encoder & Decoder should work nicely together
# so that down/up-samples cancel out
( 'spacetime_upsample' , {
'in_channels' : 256 ,
'kernel_size' : 3 ,
'time_factor' : 1 ,
'space_factor' : 2 ,
}),
( 'space-time_attn' , {
'n_rep' : 2 ,
'n_embd' : 256 ,
'n_head' : 4 ,
'd_head' : 16 ,
'has_ext' : True ,
'time_attn_kw' : { 'key_dim' : 8 },
}),
),
d_codebook = 8 , # Small codebook to incentivize interpretability
inp_channels = 3 , # Input video channel
inp_shape = ( 64 , 64 ), # Spatial frame dimensions
n_embd = 256 , # Hidden model dimension
# [...] Other kwargs for controlling LFQ module behavior
)
# Create mock input video
batch_size = 2
video_len = 16
frame_dim = 64 , 64
video = torch . randn ( batch_size , 3 , video_len , * frame_dim )
# Encode the video to extract the latent actions
( actions , encoded ), quant_loss = model . encode ( video )
# Compute the reconstructed video and its loss
recon , loss , aux_losses = model ( video )
# This should work!
assert recon . shape == ( batch_size , 3 , video_len , * frame_dim )
# Train the model
loss . backward () DynamicsModel tiene la tarea de predecir el siguiente token de video basado en el token de video anterior y las historias de acción latente. La arquitectura se basa en el modelo MaskGIT de Chang et al, (2022). Aquí hay un código de ejemplo para resaltar los componentes centrales:
from genie import DynamicsModel
blueprint = (
# Describe a Space-Time Transformer
( 'space-time_attn' , {
'n_rep' : 4 , # Number of layers
'n_embd' : 256 , # Hidden dimension
'n_head' : 4 , # Number of attention heads
'd_head' : 16 , # Dimension of each attention head
'transpose' : False ,
}),
)
# Create the model
tok_codebook = 16 # Dimension of video tokenizer codebook
act_codebook = 4 # Dimension of latent action codebook
dynamics = DynamicsModel (
desc = blueprint ,
tok_vocab = tok_codebook ,
act_vocab = act_codebook ,
embed_dim = 256 , # Hidden dimension of the model
)
batch_size = 2
num_frames = 16
img_size = 32
# Create mock token and latent action inputs
mock_tokens = torch . randint ( 0 , tok_codebook , ( batch_size , num_frames , img_size , img_size ))
mock_act_id = torch . randint ( 0 , act_codebook , ( batch_size , num_frames ))
# Compute the reconstruction loss based on Bernoulli
# masking of input tokens
loss = dynamics . compute_loss (
mock_tokens ,
mock_act_id ,
)
# Generate the next video token
new_tokens = dynamics . generate (
mock_tokens ,
mock_act_id ,
steps = 5 , # Number of MaskGIT sampling steps
)
assert new_tokes . shape == ( batch_size , num_frame + 1 , img_size , img_size ) El código se probó con Python 3.11+ y requiere torch 2.0+ (debido al uso de la asistencia de flash rápida). Para instalar las dependencias requeridas, simplemente ejecute pip install -r requirements.txt
Este repositorio se basa en la hermosa implementación de Magvit de Lucidrains y la implementación de Maskgit de Valeoi.
@article { bruce2024genie ,
title = { Genie: Generative Interactive Environments } ,
author = { Bruce, Jake and Dennis, Michael and Edwards, Ashley and Parker-Holder, Jack and Shi, Yuge and Hughes, Edward and Lai, Matthew and Mavalankar, Aditi and Steigerwald, Richie and Apps, Chris and others } ,
journal = { arXiv preprint arXiv:2402.15391 } ,
year = { 2024 }
} @article { yu2023language ,
title = { Language Model Beats Diffusion--Tokenizer is Key to Visual Generation } ,
author = { Yu, Lijun and Lezama, Jos{'e} and Gundavarapu, Nitesh B and Versari, Luca and Sohn, Kihyuk and Minnen, David and Cheng, Yong and Gupta, Agrim and Gu, Xiuye and Hauptmann, Alexander G and others } ,
journal = { arXiv preprint arXiv:2310.05737 } ,
year = { 2023 }
} @inproceedings { chang2022maskgit ,
title = { Maskgit: Masked generative image transformer } ,
author = { Chang, Huiwen and Zhang, Han and Jiang, Lu and Liu, Ce and Freeman, William T } ,
booktitle = { Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition } ,
pages = { 11315--11325 } ,
year = { 2022 }
}

