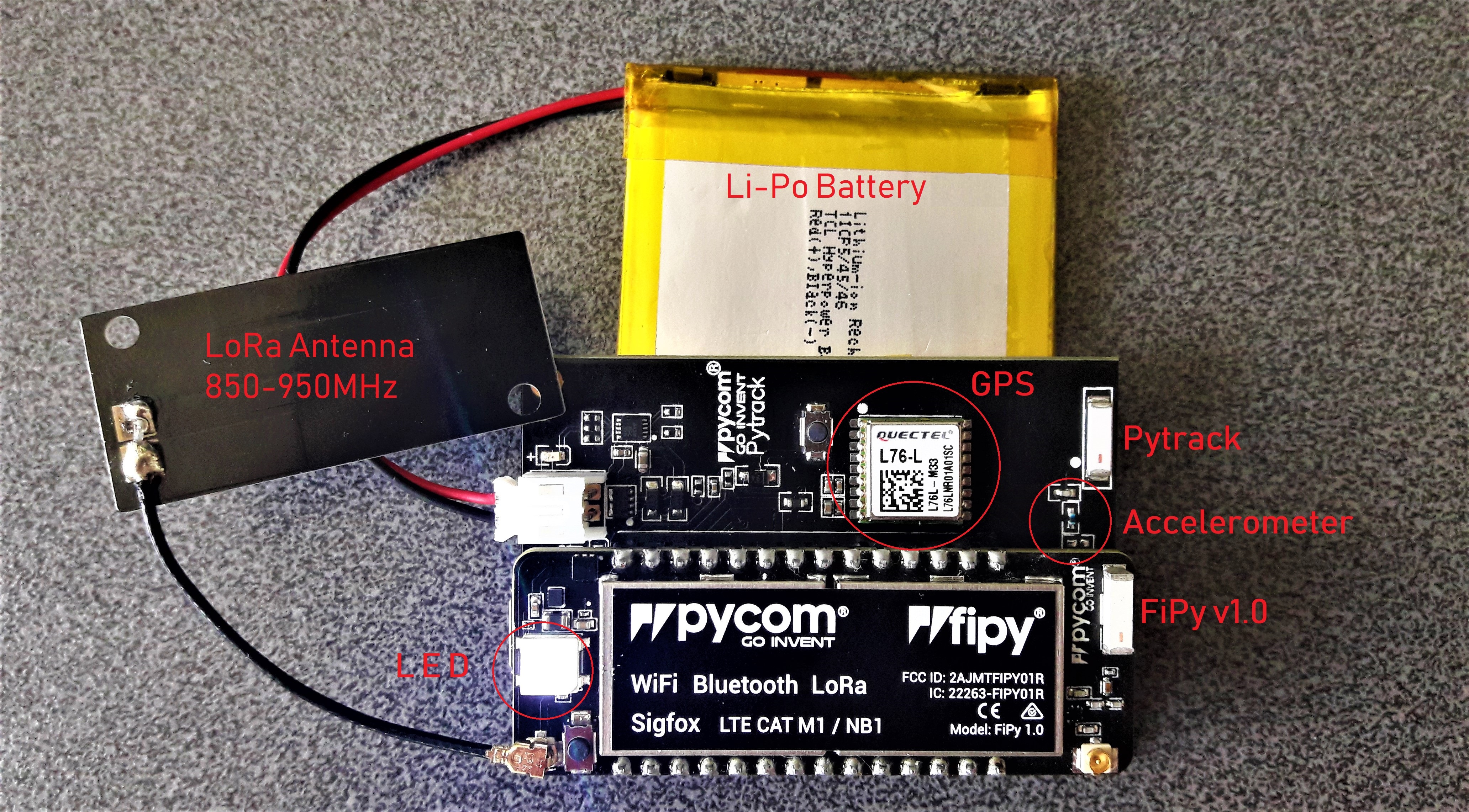
fipy GPS Accelerometer LoRa
v1.2
讀取GPS和加速度計值,然後通過LORA協議將其推向遠程服務器。
fipy 1.0與Espressif ESP32
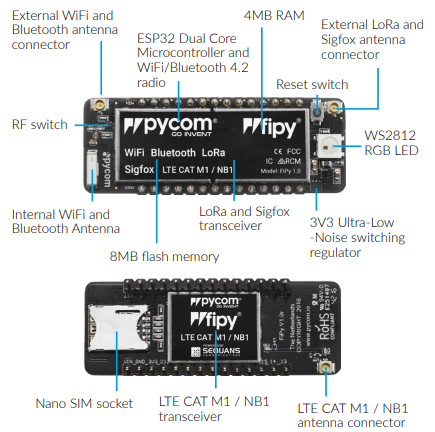
更多信息:https://pycom.io/wp-content/uploads/2018/08/fipyspecsheetaugust2017n2-1.pdf
Pytrack盾牌連接Fipy板:
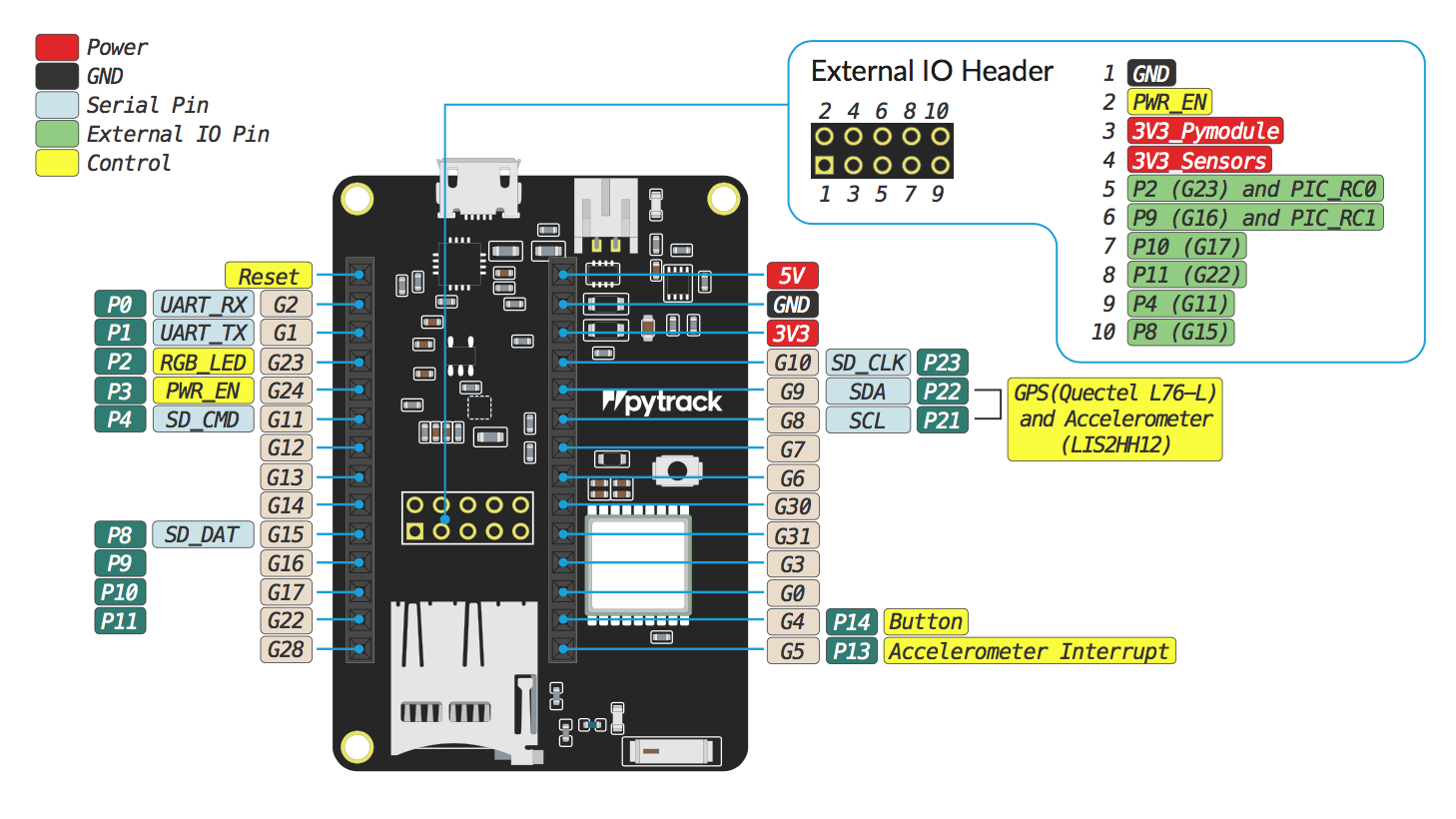 更多信息:https://docs.pycom.io/datasheets/expansionboards/pytrack/
更多信息:https://docs.pycom.io/datasheets/expansionboards/pytrack/
“多技術導管網關”作為洛拉門戶
更多信息:https://www.multitech.com/brands/multiconnect-conduit
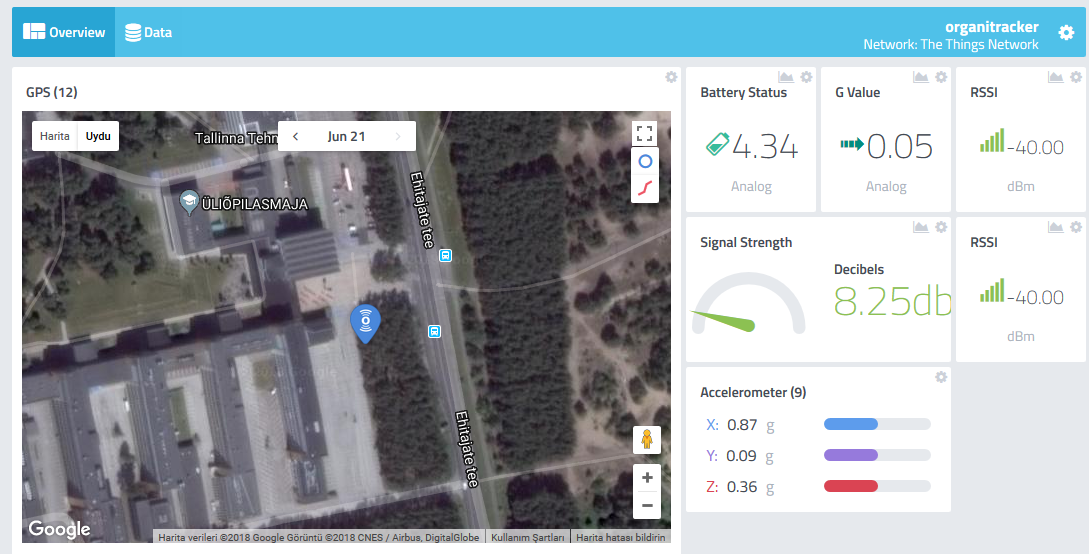
在這個項目中,我要注意消耗低功率和穩定性。為了減少功耗,我使用了Cayenne LPP,加速度計 - 喚醒模式並關閉FIPY的不必要功能。網絡:TTN(事物網絡)https://www.thethingsnetwork.org/
- 由於我使用了cayennelpp庫,因此該項目不需要有效載荷解碼器。如果我使用了其他方案,則需要用TTN中的有效負載解碼器選項卡解碼我的消息。
Pytrack: python3 -m pip install PyTrack-NTU
PYCOM董事會信息: python3 -m pip install pycom
在此項目中,Micropython用於ESP32。有關Micro Python的更多信息:
https://github.com/micropython/micropython
https://docs.micropython.org/en/latest/reference/packages.html
Cayennelpp使用將數據發送到TTN網絡。這很容易,因為只要通過Cayennelpp,只需單擊就足以解釋十六進制代碼。只需選擇選項有效載荷格式>> cayenne並自動解碼。同樣在Python方面,我們需要將這些功能添加到代碼塊中:
lpp.add_accelerometer(xsum,ysum,zsum)
lpp.add_analog_input(abs(gtotal-1))
lpp.add_analog_input(volt, channel = 114)
lpp.add_gps(c0, c1, 55)
lpp.send()
另一方面,我們需要設置Lora的設置:
lora = LoRa(mode=LoRa.LORAWAN, region=LoRa.EU868,adr=False, tx_retries=0, device_class=LoRa.CLASS_A)
-Required keys can be found on TTN network >> Applications >> Dashboard
dev_addr = struct.unpack(">l", binascii.unhexlify('********'))[0]
nwk_swkey = binascii.unhexlify('***************')
app_swkey = binascii.unhexlify('****************')
lora.join(activation=LoRa.ABP, auth=(dev_addr, nwk_swkey, app_swkey))
s = socket.socket(socket.AF_LORA, socket.SOCK_RAW)
s.setsockopt(socket.SOL_LORA, socket.SO_DR, 0)
print ("LoRa Initialized")
如果您喜歡這個項目,請出演並引用:)


