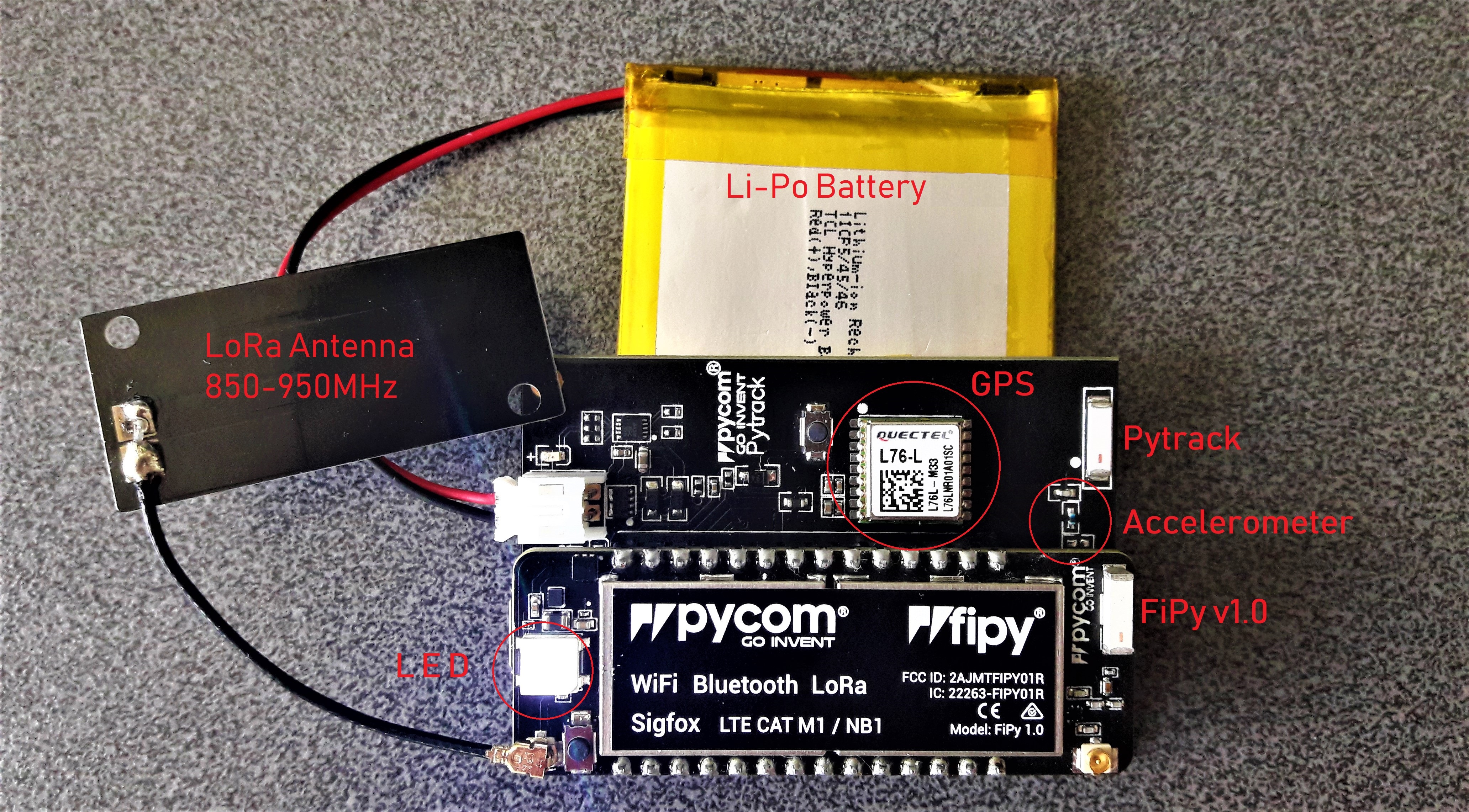
fipy GPS Accelerometer LoRa
v1.2
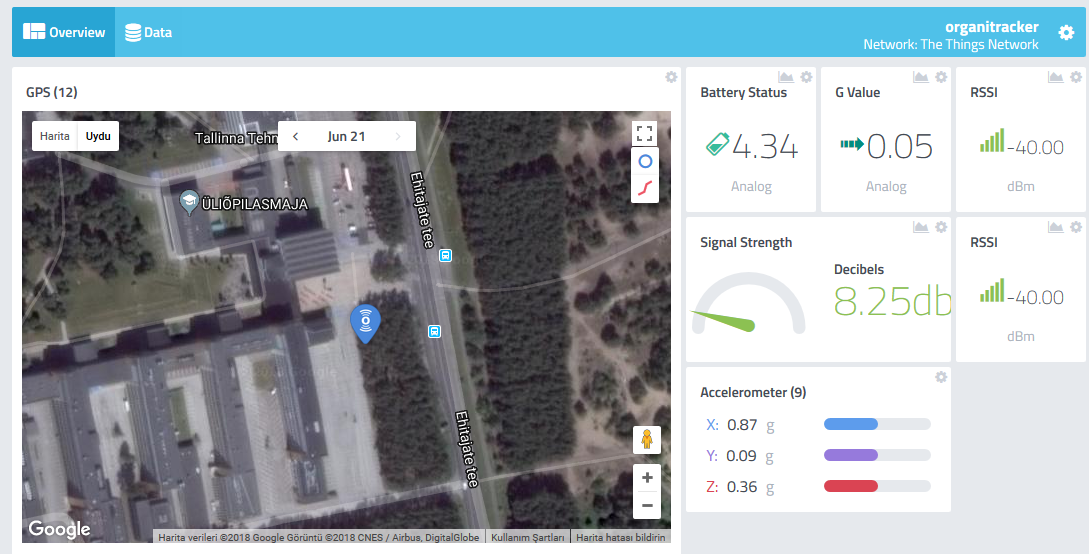
GPS 및 가속도계 값을 읽고 LORA 프로토콜을 통해 원격 서버로 푸시하십시오.
Espressif ESP32의 FIPY 1.0
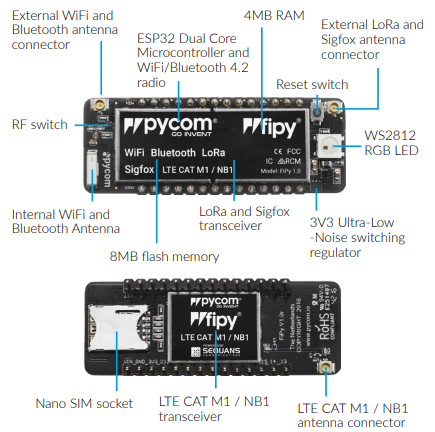
자세한 내용 : https://pycom.io/wp-content/uploads/2018/08/fipyspecsheetaugust2017n2-1.pdf
FIPY 보드를 연결하기위한 파이트랙 쉴드 :
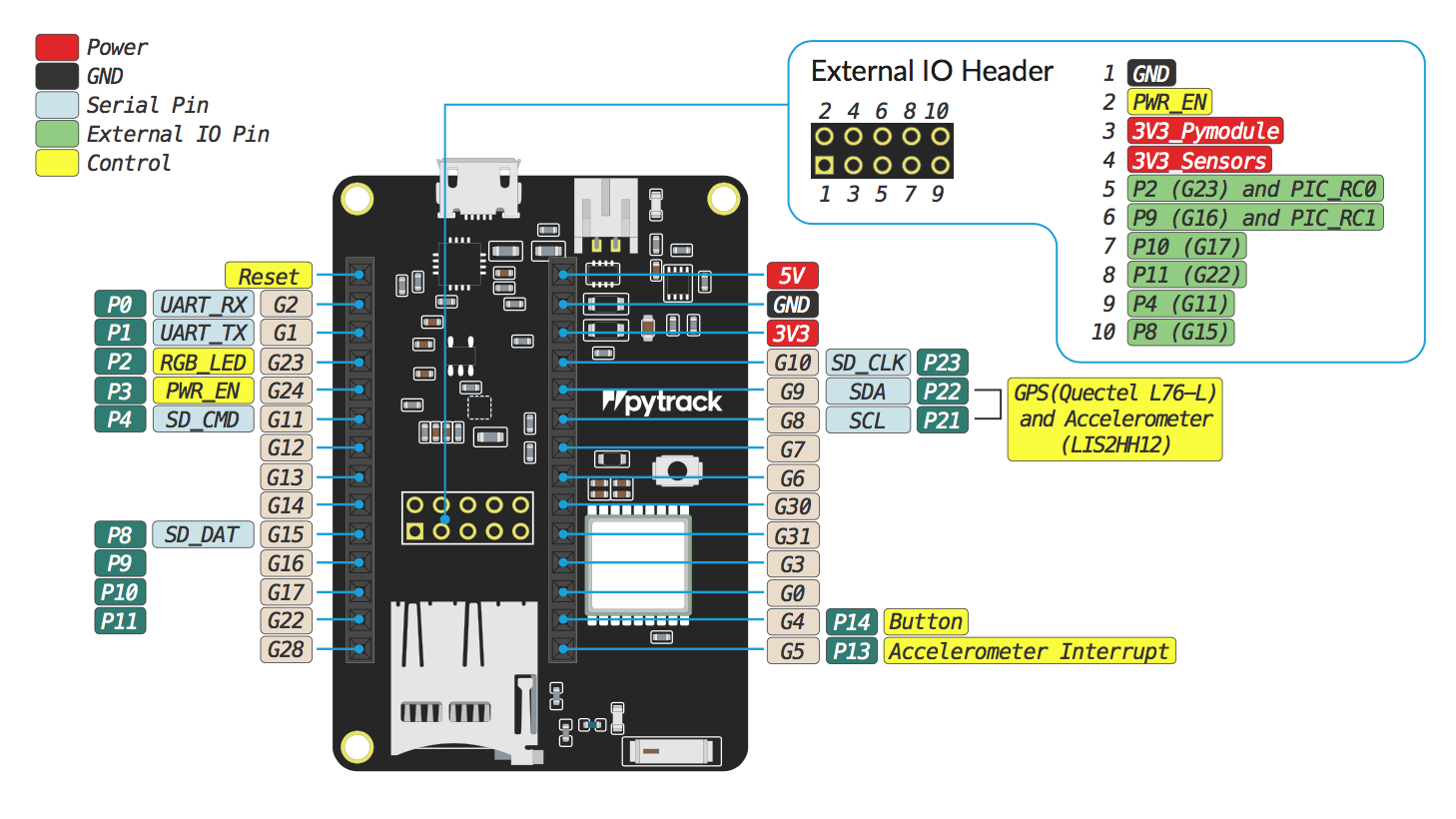 자세한 정보 : https://docs.pycom.io/datasheets/expansionboards/pytrack/
자세한 정보 : https://docs.pycom.io/datasheets/expansionboards/pytrack/
Lora 게이트웨이로서 "멀티 테크 도관 게이트웨이" 
자세한 정보 : https://www.multitech.com/brands/multiconnect-conduit
이 프로젝트에서는 저전력과 안정성을 소비하는 데주의를 기울입니다. 전력 소비를 줄이기 위해 Cayenne LPP, 가속도계 수면 - 깨우기 모드 및 FIPY의 불필요한 기능을 닫았습니다. 네트워크 : TTN (The Things Network) https://www.thethingsnetwork.org/
-CayennelPP 라이브러리를 사용했기 때문에이 프로젝트에는 페이로드 디코더가 필요하지 않습니다. 다른 시나리오를 사용한 경우 TTN의 페이로드 디코더 탭으로 메시지를 디코딩해야했을 것입니다.
Pytrack : python3 -m pip install PyTrack-NTU
PYCOM 보드 정보 : python3 -m pip install pycom
이 프로젝트에서 Micropython은 ESP32에 사용됩니다. 마이크로 파이썬에 대한 자세한 정보 :
https://github.com/micropython/micropython
https://docs.micropython.org/en/latest/reference/packages.html
Cayennelpp는 데이터를 TTN 네트워크로 전송하는 데 사용합니다. Cayennelpp 덕분에 한 번의 클릭 만 디코드 육각 코드에 충분하기 때문에 쉽습니다. 옵션 페이로드 형식 >> 카이엔 및 디코드를 자동으로 선택하십시오. 또한 파이썬 측면에서는 이러한 기능을 코드 블록에 추가해야합니다.
lpp.add_accelerometer(xsum,ysum,zsum)
lpp.add_analog_input(abs(gtotal-1))
lpp.add_analog_input(volt, channel = 114)
lpp.add_gps(c0, c1, 55)
lpp.send()
반면에 우리는 lora의 설정을 설정해야합니다.
lora = LoRa(mode=LoRa.LORAWAN, region=LoRa.EU868,adr=False, tx_retries=0, device_class=LoRa.CLASS_A)
-Required keys can be found on TTN network >> Applications >> Dashboard
dev_addr = struct.unpack(">l", binascii.unhexlify('********'))[0]
nwk_swkey = binascii.unhexlify('***************')
app_swkey = binascii.unhexlify('****************')
lora.join(activation=LoRa.ABP, auth=(dev_addr, nwk_swkey, app_swkey))
s = socket.socket(socket.AF_LORA, socket.SOCK_RAW)
s.setsockopt(socket.SOL_LORA, socket.SO_DR, 0)
print ("LoRa Initialized")
이 프로젝트가 마음에 들면 별을 맞이하고 인용하십시오 :)


