epc9148 power 3level buck acmc
1.0.0

3-уровневый синхронный преобразователь Buck со средним контролем режима тока с адаптивным балансировкой напряжения летающих конденсаторов
Верхний вид
Этот пример кода демонстрирует реализацию управления средним режимом тока в замкнутом цикле для DSPIC33CK. Он был специально разработан для контрольной конструкции EPC9148 3-уровневой конструкции преобразователя Buck.
Плата автоматически запускает преобразователь BUCK, когда питание применяется к плате, обеспечивая регулируемое выходное напряжение 12 В на выходе преобразователя. Процедура запуска управляется и выполняется машиной состояния контроллера питания и включает настраиваемую процедуру запуска с задержкой включения, периодом наращивания и хорошей задержкой питания, прежде чем падать в режим постоянного регулирования. Дополнительная подпрограмма обработчика разломов непрерывно контролирует входящие данные АЦП и биты периферического состояния и закрывает источник питания, если входное напряжение находится за пределами определенного диапазона или если выходное напряжение составляет более +/- 0,5 В от регулирования более 10 миллисекундов.
Избранные продукты Microchip Technology:
Продукты эффективного преобразования мощности (EPC):
3-уровневый модуль синхронного преобразователя EPC9148 предоставляет все необходимые интерфейсы для программирования и отладки DSC DSPIC33CK32MP102, а также тестовые точки и разъемы банановых разъем для легкой и безопасной обработки комплекта во время испытаний на скамей. QSG EPC9148 предоставляет подробные инструкции по эксплуатации.
Доска поступает запрограммирован и готова к использованию при распаковке. Для эксплуатации платы не требуется перепрограммирование целевого устройства, если не должны быть изменены функции или настройки, такие как номинальное выходное напряжение или время запуска.
В случае, если необходимо изменить функции на основе прошивки, контроллер MicroChip DSPIC33CK может быть перепрограммирован с использованием последовательного порта программирования в цирке (ICSP), доступного на интерфейсе программирования RJ-11, а также 5-контактный заголовок. Для подключения комплекта программирования необходим ленточный кабель и EPC9148. Эти интерфейсы подтверждают всех программистов/отладчиков MicroChip, таких как MPLAB® ICD4, MPLAB® Real ICE или MPLAB® Pickit4 и предыдущие производные. См. Руководство по быстрому старту EPC9148.
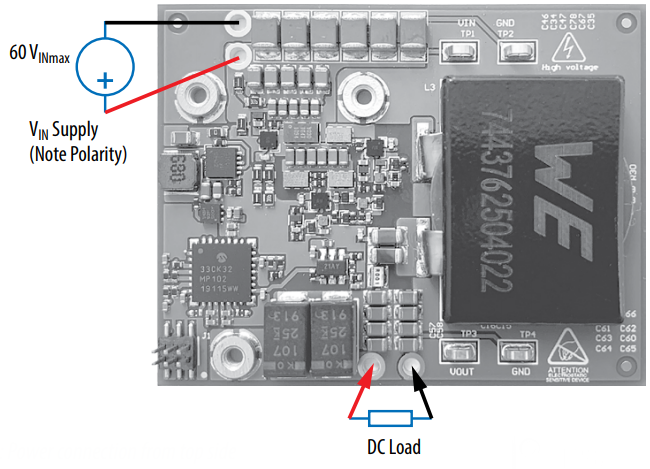
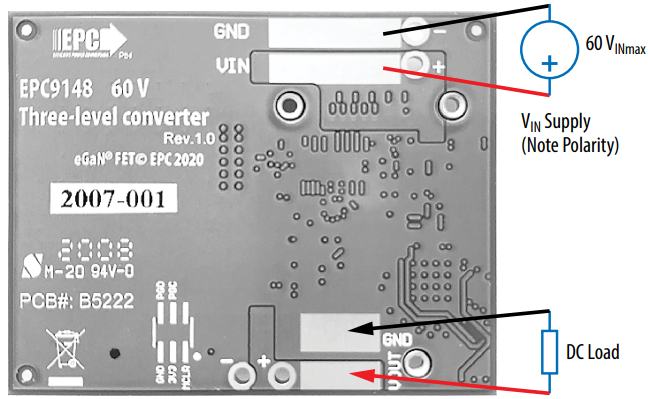
Конвертер запускается автоматически, когда на входные клеммы EPC9148 применяются более 16,6 В постоянного тока. Пожалуйста, прочитайте руководство по быстрому началу EPC9148, чтобы получить подробную информацию о требованиях для настройки и работы этой справочной конструкции.
Государственная машина проходит следующие шаги в хронологическом порядке:
а) Инициализация
На этом этапе параметры цикла управления сбрасываются в их значения по умолчанию, выходы ШИМ выключаются, но ШИМ все еще работает, постоянно запуская АЦП, чтобы сохранить входные и выходные напряжения выборки, а также температуру платы.
б) Сбросить это состояние «отступления», из которого преобразователь Buck будет перезагружен после успешного запуска и был выключен из-за условия неисправности (например, вход при/сверху/чрезмерное напряжение или условие температуры)
c) Вспомогательный после сброса государственная машина ждет, пока все флаги разлома будут очищены, а также включите, и будут установлены биты.
D) Задержка с включением (POD) После очистки преобразователя Buck, машина состояния выполнит процедуру запуска, начиная с мощности при задержке. Это просто простая задержка, в ходе которой преобразователь останется неактивным, но обработчик неисправностей будет соблюдать значения, сгенерированные ADC для возникающих условий разлома.
e) Рамчанка напряжения запуска После истечения срока действия задержки входной и выходного напряжения будет измерено. В случае предварительно смещения выхода преобразователя (напряжение = нелелевое) контроллер мощности будет «предварительно заряжен» с историей искусственного управления и выводом ШИМ, чтобы мягко наращивать выходное напряжение с самого последнего уровня.
f) Ускорение напряжения В настоящее время включены цифровой цикл обратной связи и ШИМ, а опорное значение системы с замкнутым циклом увеличивается с каждым выполнением машины состояния (интервал 100 мкс). Цикл управления был скорректирован для работы с частотой перекрестной передачи> 10 кГц, соответствующей максимальной частоте возмущения, позволяющей сохранить стабильную систему управления.
g) Правильная задержка после того, как эталонное напряжение было увеличено до предварительно определенного номинального уровня, штат Машина переключается в период хорошей задержки. Это еще одна, простая задержка, когда цикл управления находится в стабильном состоянии, ожидая истечения периода задержки.
h) Онлайн после истечения срока службы питания, преобразователь падает в номинальную работу. В этом условии он непрерывно наблюдает о эталонном значении для изменений. Если любая другая часть прошивки изменит ссылку на контроллер, машина состояния мягко настраивается на новый уровень вместо жесткого переключения ссылки.
i) Приостановка/ошибка Если контроллер питания выключен и сброшен с помощью внешних команд (например, обработчик неисправностей обнаружает условие неисправности или посредством пользовательского взаимодействия), машина состояния переключается в состояние приостановки, что отключает выходы ШИМ и выполнение цикла управления, очищает историю управления и сбрасывает стату
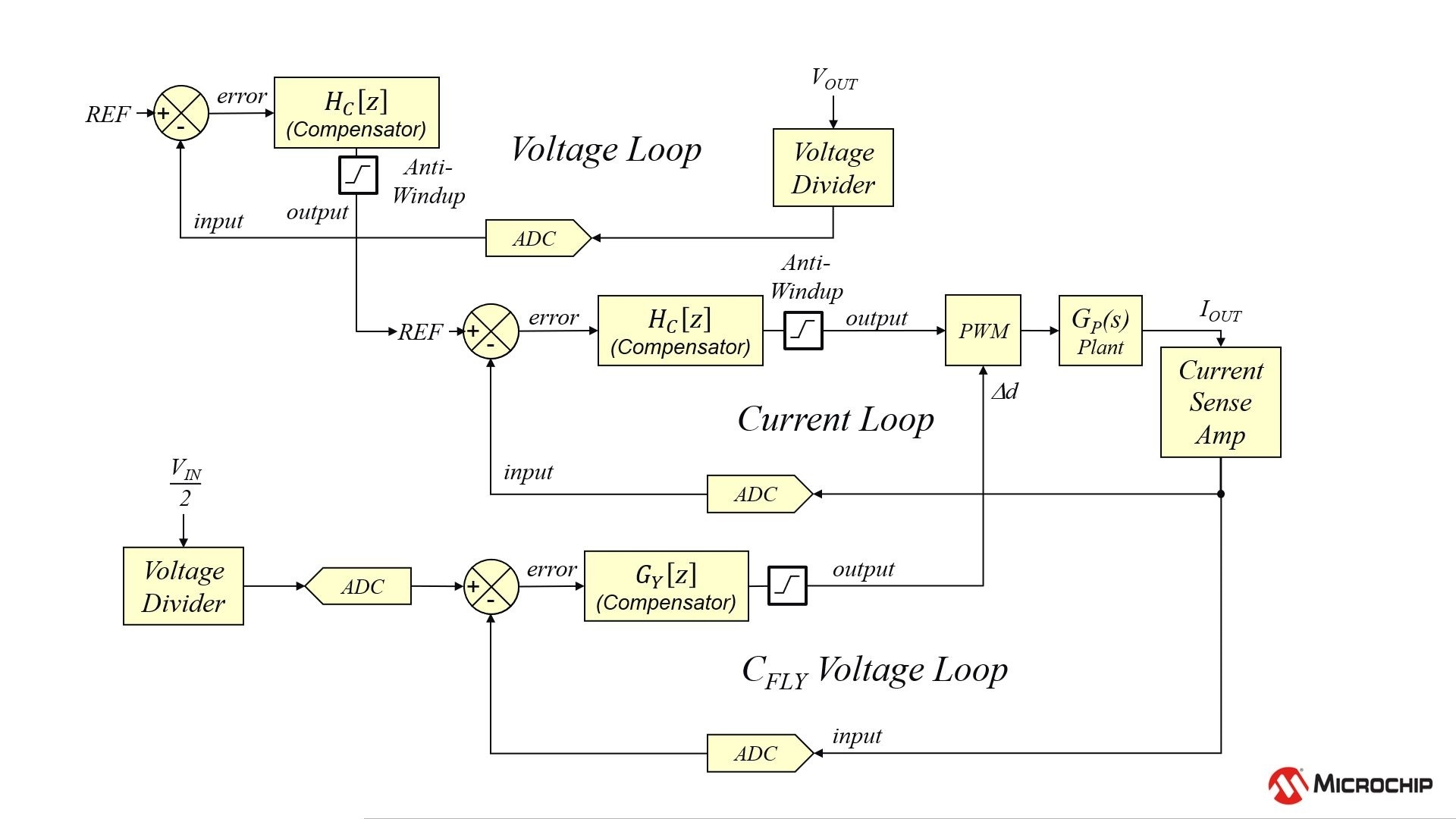
Эта прошивка использует два цифровых контроллера типа II для закрытия цикла обратной связи в среднем управлении режимом тока. Контроллер состоит из двух каскадных петель. Цикл обратной связи внешнего напряжения определяет ошибку выходного напряжения и вычисляет требуемую ссылку для внутреннего среднего цикла обратной связи. Внутренняя средняя петля тока определяет самое последнее отклонение между новой ссылкой и последним сигналом обратной связи и корректирует рабочее цикл ШМ для удовлетворения потребности в мощности и исправить ошибку выходного напряжения. Числовой выход каждого цикла проверяется с определенными минимумами и порогами максимумов и, при необходимости, зажимается с этими пользовательскими пороговыми значениями для защиты аппаратного обеспечения и предотвращения насыщения цикла.
В дополнение к базовой средней реализации управления режимом тока вводится третий цикл, контролирующий и уравновешивающий напряжение летающих конденсаторов. Эта петля отслеживает пик напряжения напряжения и долину колеблющегося напряжения летающих конденсаторов и настраивает время ШИМ, чтобы компенсировать отклонения по сравнению с допусками, нагрузкой и температурой. Компенсационный фильтр основан на простом фильтре низкого уровня, ограничивающего скорость изменения коэффициента компенсации ошибки балансировки, чтобы предотвратить внутренние колебания во время быстрых переходных ответов. Затем коррекционный коэффициент включается в текущий выходной сигнал в каждом цикле переключения.
Эта система управления может быть включена/выключена, используя бит enable в словом состояния структуры данных контроллера CNPNZ_T.
Исходный код управления конфиденциально настроен и генерируется программным обеспечением PowerSmart ™ - Digital Control Library Designer (DCLD).
Это дополнительное программное обеспечение для дизайна доступно для загрузки на страницах GitHub:
После установки конфигурация контроллера может быть изменена. Самая последняя конфигурация может быть открыта из IDE MPLAB X®, щелкнув правой кнопкой мыши в соответствующем файле конфигурации управления цикла 'xxx_loop.dcld', расположенной в папке важных файлов диспетчера проектов. Каждый цикл управления настроен в своем отдельном файле конфигурации с именем «v_loop.dcld» для петлей напряжения и «i_loop.dcld» для текущих циклов. При щелчке правой кнопкой мыши выберите «Открыть в системе», чтобы открыть конфигурацию в DCLD PowerSmart ™.
Пожалуйста, обратитесь к Руководству пользователя PowersMart ™ DCLD, которое включено в программное обеспечение и может быть открыто из меню справки приложения.
Интерфейс управления пользователем не был добавлен в прошивку. Любое изменение в прошивке и фундаментальной работе справочной конструкции, включая перепрограммирование номинального выходного напряжения, может быть сделано путем редактирования значений, специфичных для оборудования, в файле Header Header Header 'EPC9148_R10_HWDESCR.H, расположенном в' Project Manager => Header Files/config '
Настройки преобразователя в этом файле определяются как физические значения, такие как Volt, Ampere, OHM и т. Д. Каждое определенное значение преобразуется в двоичные числа так называемыми макросами, во время компиляции. Таким образом, пользователям не нужно конвертировать значения вручную.
Чтобы запрограммировать преобразователь, чтобы обеспечить номинальное выходное напряжение, отличное от 20 В постоянного тока, установленного по умолчанию, выполните следующие действия:
Настройка для номинального выходного напряжения устанавливается с использованием этих определений
#define BUCK_VOUT_NOMINAL (float)12.000 // Nominal output voltage
#define BUCK_VOUT_TOLERANCE_MAX (float)0.500 // Output voltage tolerance [+/-]
#define BUCK_VOUT_TOLERANCE_MIN (float)0.100 // Output voltage tolerance [+/-]
Настройки толерантности выше включают в себя переходный отклик на максимальной стадии нагрузки. Значение для максимальной допуска выходного напряжения 'BUCK_VOUT_TOLERANCE_MAX' наблюдается обработчиком неисправностей. Если показания выходного напряжения отклоняются от самого последнего значения эталонного напряжения больше, чем заданный диапазон, преобразователь будет выключен, и будет указана ошибка регулирования. Благодарность питания автоматически восстанавливается, как только условие неисправности будет очищено, а период задержки восстановления, указанный BUCK_REGERR_RECOVERY_DELAY, объявлен в файле заголовка оборудования EPC9148 Описание. Чувствительность отказа отказа может быть скорректирована путем изменения объявления BUCK_REGERR_TRIP_DELAY.
(указанные номера строк могут быть изменены)
Этот код примеров включает в себя альтернативный пропорциональный цикл управления, который обычно используется при измерениях частотной характеристики электростанции. Когда следующее определение устанавливается на TRUE, общий основной цикл управления заменяется пропорциональным контроллером.
app_power_control.c: #define PLANT_MEASUREMENT false
Пропорциональные контроллеры по умолчанию нестабильны и не подходят для регулирования вывода источника питания в нормальных условиях эксплуатации. Во время измерения завода обязательно, что входное напряжение и нагрузка остаются стабильными и не изменяются.
Для получения дополнительной информации о том, как провести измерение электростанции, пожалуйста, обратитесь к разделу 6.1 Руководства пользователя PowerSmart ™ DCLD.
(C) 2020, Microchip Technology Inc.


