epc9148 power 3level buck acmc
1.0.0

محول باك متزامن من 3 مستويات مع متوسط التحكم في الوضع الحالي مع موازنة جهد مكثف الطيران التكيفي
منظر أعلى
يوضح مثال الكود هذا تطبيق التحكم الحالي في وضع حلقة مغلقة لـ DSPIC33CK. وقد تم تطويره على وجه التحديد لتصميم مرجع محول Buck 3-level 3.
تبدأ اللوحة محول Buck تلقائيًا عند تطبيق الطاقة على اللوحة ، مما يوفر جهد إخراج منظم قدره 12 فولت عند إخراج المحول. يتم التحكم في إجراء بدء التشغيل وتنفيذه بواسطة آلة حالة وحدة التحكم في الطاقة ويتضمن إجراء بدء تشغيل قابل للتكوين مع تأخير الطاقة ، وفترة الارتفاع وتأخير الطاقة جيدًا قبل الانخفاض في وضع التنظيم الثابت. يراقب روتين معالج الأعطال الإضافي بشكل مستمر بيانات ADC الواردة و BETS OPRYLATION وتغلق مصدر الطاقة إذا كان جهد الإدخال خارج النطاق المحدد أو إذا كان جهد الخرج أكثر من +/- 0.5 فولت خارج التنظيم لأكثر من 10 مللي ثانية.
منتجات تكنولوجيا الرقائق الدقيقة المميزة:
منتجات تحويل الطاقة الفعالة (EPC) المميزة:
توفر وحدة محول Buck المتزامنة EPC9148 من 3 واجهات مطلوبة لبرمجة وتصحيح DSPIC33CK32MP102 DSC بالإضافة إلى نقاط الاختبار وموصلات جاك الموز لسهولة معالجة المجموعة أثناء اختبارات المقعد. يوفر EPC9148 QSG تعليمات إجراءات تشغيل مفصلة.
يأتي اللوحة مبرمجة وجاهزة لاستخدامها عند تفريغها. لا يلزم إعادة برمجة الجهاز المستهدف لتشغيل اللوحة ما لم يكن هناك حاجة إلى تعديل الميزات أو الإعدادات مثل جهد الإخراج الاسمي أو توقيت بدء التشغيل.
في حالة حاجة إلى تغيير الميزات المستندة إلى البرامج الثابتة ، يمكن إعادة برمجة وحدة التحكم MicroChip DSPIC33CK باستخدام ميناء البرمجة التسلسلي داخل الدائرة (ICSP) على واجهة البرمجة RJ-11 بالإضافة إلى رأس 5 بودين. هناك حاجة إلى كابل الشريط لتوصيل مجموعة البرمجة و EPC9148. تدعم هذه الواجهات جميع المبرمجين/تصحيحات الدائرة في رقاقة ، مثل MPLAB® ICD4 ، MPLAB® Real ICE أو MPLAB® Pickit4 والمشتقات السابقة. انظر دليل البدء السريع EPC9148 للحصول على التفاصيل.
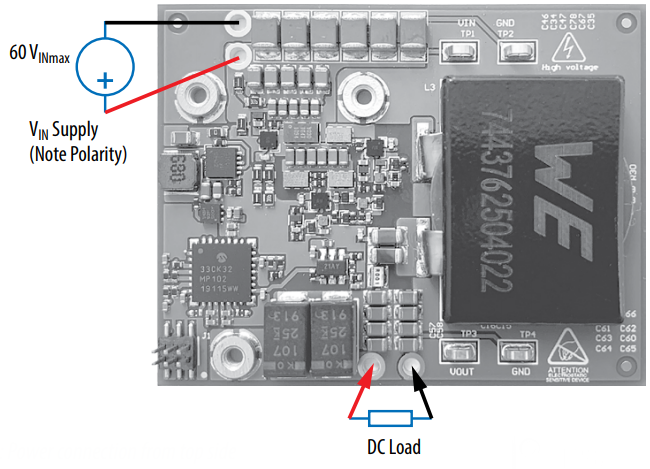
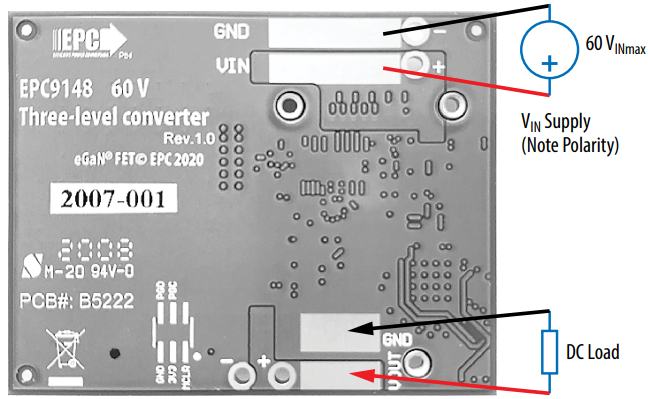
يبدأ المحول تلقائيًا عندما يتم تطبيق أكثر من 16.6 فولت DC عبر محطات الإدخال في EPC9148. يرجى قراءة دليل البدء السريع EPC9148 للحصول على معلومات مفصلة حول متطلبات إعداد وتشغيل هذا التصميم المرجعي.
يمر آلة الولاية بالخطوات التالية بالترتيب الزمني:
أ) التهيئة
في هذه الخطوة ، تتم إعادة تعيين معلمات حلقة التحكم إلى الإعدادات الافتراضية ، يتم إيقاف مخرجات PWM ولكن لا تزال PWM تعمل ، مما يؤدي باستمرار إلى ADC للحفاظ على جهد أخذ العينات وجهد الإخراج وكذلك درجة حرارة اللوحة.
ب) إعادة تعيين هذه الحالة "السقوط الخلفي" الذي سيتم من خلاله إعادة تشغيل محول باك بمجرد بدء تشغيله بنجاح وتم إغلاقه بسبب حالة خطأ (مثل الإدخال تحت/تجاوز الجهد أو حالة درجة الحرارة)
ج) الاستعداد بعد إعادة التعيين ، تنتظر آلة الحالة لتطهير جميع أعلام الصدع وتمكين التمكين والبتات.
د) تأخير الطاقة (POD) بمجرد مسح محول Buc ، سيتم تنفيذ جهاز الحالة على إجراء بدء التشغيل بدءًا من الطاقة عند التأخير. هذا مجرد تأخير بسيط سيظل خلاله المحول غير نشط ولكن معالج الخطأ سوف يلاحظ القيم التي تم إنشاؤها بواسطة ADC لظروف الصدع التي تحدث.
هـ) المنحدر الجهد بعد انتهاء صلاحية تأخير الطاقة ، سيتم قياس جهد الإدخال والمخرجات. في حالة انحياز إخراج المحول مسبقًا (الجهد = غير الصفر) ، سيتم "الشحن" مسبقًا مع تاريخ التحكم الاصطناعي وإخراج PWM لزيادة جهد الخرج بهدوء من مستواها الأخير.
و) تم تمكين تحرير الجهد الآن ، يتم تمكين حلقة التغذية المرتدة الرقمية و PWM ويتم زيادة القيمة المرجعية لنظام الحلقة المغلقة مع كل تنفيذ لآلة الحالة (فاصل 100 µSEC). تم تعديل حلقة التحكم للعمل مع تردد متقاطع قدره> 10 كيلو هرتز مطابقة الحد الأقصى لتردد الاضطراب المسموح به للحفاظ على نظام التحكم مستقرًا.
ز) تأخير القوة الجيدة بعد زيادة الجهد المرجعي إلى المستوى الاسمي المحدد مسبقًا ، يتحول آلة الحالة إلى فترة تأخير الطاقة الجيدة. هذا تأخير بسيط آخر حيث تكون حلقة التحكم في حالة مستقرة في انتظار انتهاء فترة التأخير.
ح) عبر الإنترنت بعد انتهاء صلاحية تأخير الطاقة الجيدة ، ينخفض المحول إلى التشغيل الاسمي. في هذه الحالة ، يلاحظ باستمرار القيمة المرجعية للتغييرات. إذا قام أي جزء آخر من البرامج الثابتة بتغيير مرجع وحدة التحكم ، فإن جهاز الحالة ستعمل بهدوء إلى المستوى الجديد بدلاً من تبديل المرجع.
1) التعليق/الخطأ إذا تم إيقاف تشغيل وحدة تحكم الطاقة وإعادة تعيينه بالأوامر الخارجية (على سبيل المثال ، معالج الصدع الذي يكتشف حالة خطأ أو من خلال تداخل المستخدم) ، تقوم جهاز الحالة بالتبديل إلى حالة التعليق ، والتي تعطل مخرجات PWM وتنفيذ حلقة التحكم ، ومسح تاريخ التحكم وإعادة تعيين آلة الحالة مرة أخرى
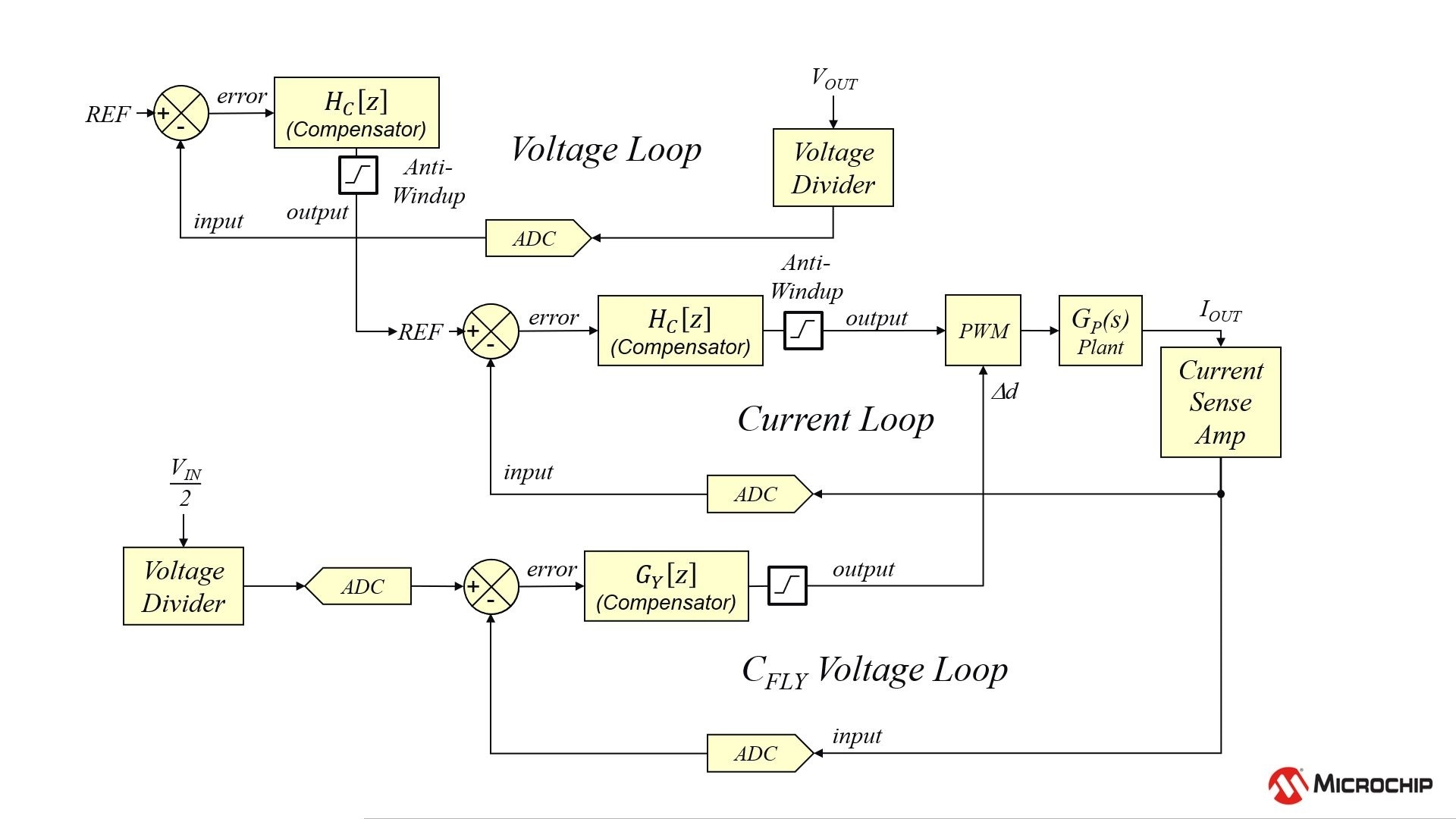
يستخدم هذا البرنامج الثابت تحكمين رقميين من النوع الثاني لإغلاق حلقة التغذية المرتدة في متوسط التحكم في الوضع الحالي. يتكون وحدة التحكم من حلقتين متتاليتين. تحدد حلقة التغذية المرتدة من الجهد الخارجي خطأ جهد الإخراج ويحسب المرجع المطلوب لحلقة التغذية المرتدة الحالية الداخلية. تحدد متوسط الحلقة الحالية المتوسطة الحالية الانحراف الأحدث بين المرجع الجديد وأحدث إشارة التغذية المرتدة وضبط دورة عمل PWM لتلبية الطلب على الطاقة وتصحيح خطأ جهد الخرج. يتم فحص الناتج الرقمي لكل حلقة مقابل عتبات الحد الأدنى المحددة والحد الأقصى ، وعند الضرورة ، تم تثبيته على هذه العتبات المعرفة من قبل المستخدم لحماية الأجهزة ومنع تشبع الحلقة.
بالإضافة إلى تنفيذ التحكم في الوضع الحالي الأساسي ، يتم تقديم حلقة ثالثة ، ومراقبة وموازنة جهد مكثف الطيران. تتتبع هذه الحلقة ذروة الجهد والوادي من جهد مكثف الطيران المتأرجح وإيقاف توقيت PWM للتعويض عن الانحرافات على التحمل المكون ، والحمل ودرجة الحرارة. يعتمد مرشح التعويض على مرشح تمرير منخفض بسيط يحد من معدل تغيير عامل تعويض الأخطاء الموازنة لمنع التذبذبات الداخلية أثناء الاستجابات العابرة السريعة. ثم يتم دمج عامل التصحيح في إخراج الحلقة الحالية في كل دورة تبديل.
يمكن تشغيل/إيقاف تشغيل نظام التحكم هذا باستخدام بت تمكين في كلمة الحالة لهيكل بيانات وحدة تحكم CNPNZ_T.
يتم تكوين رمز مصدر حلقة التحكم وإنشائه بواسطة برنامج PowerSmart ™ - Digital Control Library Designer (DCLD).
يتوفر برنامج التصميم الإضافي هذا للتنزيل على صفحات GitHub:
بمجرد التثبيت ، يمكن تعديل تكوين وحدة التحكم. يمكن فتح أحدث تكوين من داخل MPLAB X® IDE بالنقر بزر الماوس الأيمن على ملف تكوين حلقة التحكم المعنية "xxx_loop.dcld" الموجود في مجلد الملفات المهم في مدير المشروع. يتم تكوين كل حلقة تحكم في ملف التكوين الفردي المسماة "V_LOOP.DCLD" لحلقات الجهد و "i_loop.dcld" للحلقات الحالية. عند النقر بزر الماوس الأيمن فوق "فتح في النظام" لفتح التكوين في PowerSmart ™ DCLD.
يرجى الرجوع إلى دليل المستخدم لـ PowerSmart ™ DCLD الذي يتم تضمينه في البرنامج ويمكن فتحه من قائمة المساعدة في التطبيق.
لم تتم إضافة واجهة التحكم في المستخدم إلى البرامج الثابتة. يمكن إجراء أي تغيير في البرامج الثابتة والتشغيل الأساسي للتصميم المرجعي ، بما في ذلك إعادة برمجة جهد الإخراج الاسمي عن طريق تحرير القيم الخاصة بالأجهزة في ملف رأس الأجهزة "EPC9148_R10_HWDESCR.H" الموجود في "Project Manager => Config/config"
يتم تعريف إعدادات المحول في هذا الملف على أنها القيم الفعلية مثل Volt و Ampere و OHM ، وما إلى ذلك. وبالتالي ، لا يتعين على المستخدمين تحويل القيم يدويًا.
لبرمجة المحول لتوفير جهد إخراج اسمي يختلف عن 20 فولت تيار مستمر بشكل افتراضي ، اتبع هذه الخطوات:
يتم تعيين الإعداد لجهد الإخراج الاسمي باستخدام هذه التعريفات
#define BUCK_VOUT_NOMINAL (float)12.000 // Nominal output voltage
#define BUCK_VOUT_TOLERANCE_MAX (float)0.500 // Output voltage tolerance [+/-]
#define BUCK_VOUT_TOLERANCE_MIN (float)0.100 // Output voltage tolerance [+/-]
تشمل إعدادات التسامح أعلاه الاستجابة العابرة في خطوة الحمل القصوى. يلاحظ معالج الصدع. إذا تم تحويل قراءة جهد الإخراج من أحدث قيمة الجهد المرجعي بأكثر من النطاق المحدد ، فسيتم إيقاف المحول وسيتم الإشارة إلى خطأ في التنظيم. سيتم استرداد مصدر الطاقة تلقائيًا بمجرد مسح حالة الخطأ وتأمل فترة تأخير الاسترداد التي تحددها Buck_regerr_recovery_delay ، التي تم الإعلان عنها في ملف رأس الأجهزة EPC9148. يمكن ضبط حساسية رحلة الصدع عن طريق تغيير إعلان Buck_regerr_trip_delay.
(قد تخضع أرقام الأسطر المعطاة للتغيير)
تتضمن أمثلة هذه الكود حلقة تحكم متناسبة بديلة وتستخدم عادة أثناء قياسات استجابة تردد محطة توليد الطاقة. عندما يتم ضبط التعريف التالي على TRUE ، يتم استبدال حلقة التحكم الرئيسية الشائعة بوحدة التحكم النسبية.
app_power_control.c: #define PLANT_MEASUREMENT false
تعتبر وحدات التحكم النسبية بشكل افتراضي غير مستقر وليست مناسبة لتنظيم إخراج مصدر الطاقة في ظل ظروف التشغيل العادية. أثناء قياس النبات ، من الضروري أن يظل جهد الإدخال والحمل مستقرًا ولا يتغير.
لمزيد من المعلومات حول كيفية إجراء قياس محطة توليد الطاقة ، يرجى الرجوع إلى القسم 6.1 من دليل مستخدم PowerSmart ™ DCLD.
(ج) 2020 ، Microchip Technology Inc.


