YOLOv6
v6-Segmentation
英語| 简体中文
紙の実装:
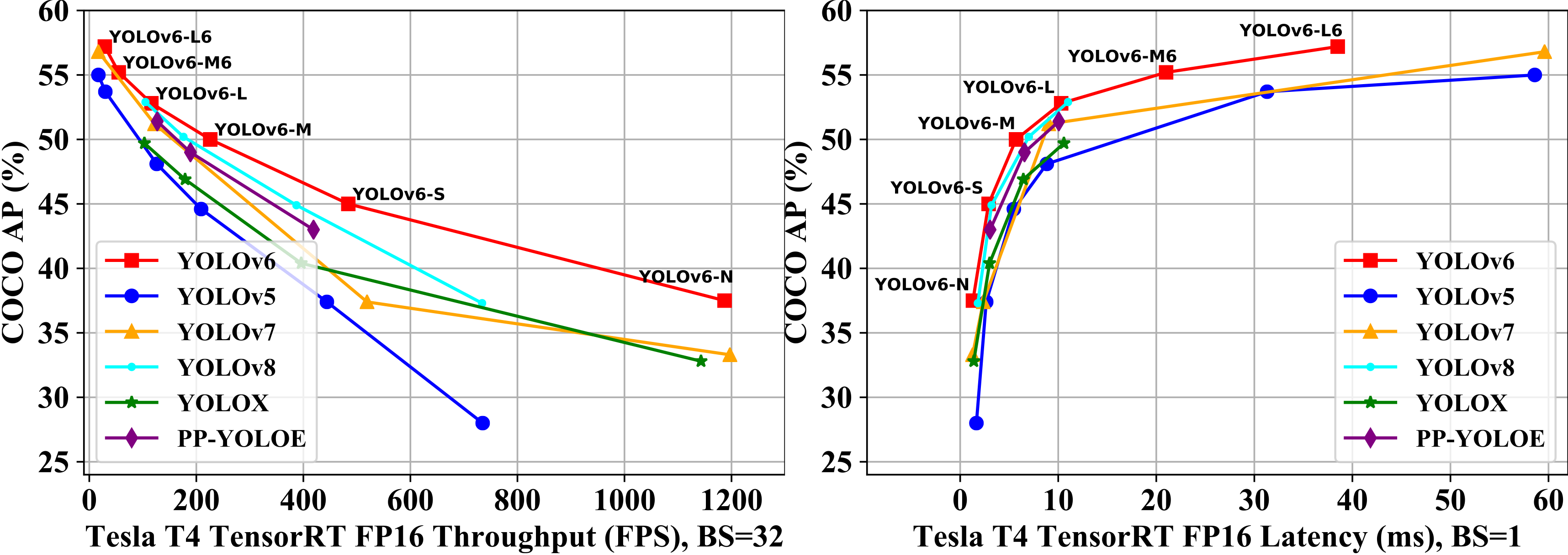
| モデル | サイズ | マップval 0.5:0.95 | 速度T4 TRT FP16 B1 (FPS) | 速度T4 TRT FP16 B32 (FPS) | パラメージ (m) | フロップ (g) |
|---|---|---|---|---|---|---|
| yolov6-n | 640 | 37.5 | 779 | 1187 | 4.7 | 11.4 |
| yolov6-s | 640 | 45.0 | 339 | 484 | 18.5 | 45.3 |
| yolov6-m | 640 | 50.0 | 175 | 226 | 34.9 | 85.8 |
| Yolov6-L | 640 | 52.8 | 98 | 116 | 59.6 | 150.7 |
| Yolov6-N6 | 1280 | 44.9 | 228 | 281 | 10.4 | 49.8 |
| Yolov6-S6 | 1280 | 50.3 | 98 | 108 | 41.4 | 198.0 |
| Yolov6-M6 | 1280 | 55.2 | 47 | 55 | 79.6 | 379.5 |
| Yolov6-L6 | 1280 | 57.2 | 26 | 29 | 140.4 | 673.4 |
| モデル | サイズ | マップval 0.5:0.95 | 速度T4 TRT FP16 B1 (FPS) | 速度T4 TRT FP16 B32 (FPS) | パラメージ (m) | フロップ (g) |
|---|---|---|---|---|---|---|
| yolov6-n | 640 | 35.9 300e 36.3 400e | 802 | 1234 | 4.3 | 11.1 |
| yolov6-t | 640 | 40.3 300e 41.1 400e | 449 | 659 | 15.0 | 36.7 |
| yolov6-s | 640 | 43.5 300e 43.8 400e | 358 | 495 | 17.2 | 44.2 |
| yolov6-m | 640 | 49.5 | 179 | 233 | 34.3 | 82.2 |
| yolov6-l-relu | 640 | 51.7 | 113 | 149 | 58.5 | 144.0 |
| Yolov6-L | 640 | 52.5 | 98 | 121 | 58.5 | 144.0 |
| モデル | サイズ | 精度 | マップval 0.5:0.95 | 速度T4 TRT B1 (FPS) | 速度T4 TRT B32 (FPS) |
|---|---|---|---|---|---|
| Yolov6-N Repopt | 640 | INT8 | 34.8 | 1114 | 1828年 |
| yolov6-n | 640 | FP16 | 35.9 | 802 | 1234 |
| Yolov6-T Repopt | 640 | INT8 | 39.8 | 741 | 1167 |
| yolov6-t | 640 | FP16 | 40.3 | 449 | 659 |
| Yolov6-S Repopt | 640 | INT8 | 43.3 | 619 | 924 |
| yolov6-s | 640 | FP16 | 43.5 | 377 | 541 |
| モデル | サイズ | マップval 0.5:0.95 | SM8350 (MS) | MT6853 (MS) | SDM660 (MS) | パラメージ (m) | フロップ (g) |
|---|---|---|---|---|---|---|---|
| yolov6lite-s | 320*320 | 22.4 | 7.99 | 11.99 | 41.86 | 0.55 | 0.56 |
| yolov6lite-m | 320*320 | 25.1 | 9.08 | 13.27 | 47.95 | 0.79 | 0.67 |
| yolov6lite-l | 320*320 | 28.0 | 11.37 | 16.20 | 61.40 | 1.09 | 0.87 |
| yolov6lite-l | 320*192 | 25.0 | 7.02 | 9.66 | 36.13 | 1.09 | 0.52 |
| yolov6lite-l | 224*128 | 18.9 | 3.63 | 4.99 | 17.76 | 1.09 | 0.24 |
git clone https://github.com/meituan/YOLOv6
cd YOLOv6
pip install -r requirements.txtトレーニングココデータセットを参照してください。
単一GPU
# P5 models
python tools/train.py --batch 32 --conf configs/yolov6s_finetune.py --data data/dataset.yaml --fuse_ab --device 0
# P6 models
python tools/train.py --batch 32 --conf configs/yolov6s6_finetune.py --data data/dataset.yaml --img 1280 --device 0マルチGPU(DDPモード推奨)
# P5 models
python -m torch.distributed.launch --nproc_per_node 8 tools/train.py --batch 256 --conf configs/yolov6s_finetune.py --data data/dataset.yaml --fuse_ab --device 0,1,2,3,4,5,6,7
# P6 models
python -m torch.distributed.launch --nproc_per_node 8 tools/train.py --batch 128 --conf configs/yolov6s6_finetune.py --data data/dataset.yaml --img 1280 --device 0,1,2,3,4,5,6,7 ├── coco
│ ├── annotations
│ │ ├── instances_train2017.json
│ │ └── instances_val2017.json
│ ├── images
│ │ ├── train2017
│ │ └── val2017
│ ├── labels
│ │ ├── train2017
│ │ ├── val2017
│ ├── LICENSE
│ ├── README.txt
Yolov6は、さまざまな入力解像度モードをサポートしています。詳細については、入力サイズの設定方法を参照してください。
トレーニングプロセスが破損している場合は、トレーニングを再開できます
# single GPU training.
python tools/train.py --resume
# multi GPU training.
python -m torch.distributed.launch --nproc_per_node 8 tools/train.py --resume
上記のコマンドは、Yolov6ディレクトリの最新のチェックポイントを自動的に見つけ、トレーニングプロセスを再開します。
また、チェックポイントパスを指定することもできます--resumeパラメーター
# remember to replace /path/to/your/checkpoint/path to the checkpoint path which you want to resume training.
--resume /path/to/your/checkpoint/path
これは、提供する特定のチェックポイントから再開されます。
640×640または1280x1280の解像度でCoCo Val2017データセットのマップを再現する
# P5 models
python tools/eval.py --data data/coco.yaml --batch 32 --weights yolov6s.pt --task val --reproduce_640_eval
# P6 models
python tools/eval.py --data data/coco.yaml --batch 32 --weights yolov6s6.pt --task val --reproduce_640_eval --img 1280まず、Yolov6リリースから事前に処理されたモデルをダウンロードするか、訓練されたモデルを使用して推論を行います。
第二に、 tools/infer.pyを使用して推論を実行します
# P5 models
python tools/infer.py --weights yolov6s.pt --source img.jpg / imgdir / video.mp4
# P6 models
python tools/infer.py --weights yolov6s6.pt --img 1280 1280 --source img.jpg / imgdir / video.mp4ローカルカメラまたはWebカメラに推論する場合は、実行できます。
# P5 models
python tools/infer.py --weights yolov6s.pt --webcam --webcam-addr 0
# P6 models
python tools/infer.py --weights yolov6s6.pt --img 1280 1280 --webcam --webcam-addr 0 webcam-addrローカルカメラ番号IDまたはRTSPアドレスにすることができます。
Amazon SagemakerとのYolov6トレーニング:AshwinccのYolov6-Sagemaker
Yolov6 NCNN Androidアプリデモ:FeigeChuanshuのNCNN-Android-Yolov6
yolov6 onnxruntime/mnn/tnn c ++:yolov6-ort、yolov6-mnnおよびyolov6-tnn from deftruth
Yolov6 Tensorrt Python:linaom1214のyolov6-tensorrt-python
Yolov6 Tensorrt Windows C ++:Wei ZengのYolort
グレード付きのハギングフェイススペースのYolov6 Webデモ。
Restream -Litを使用したDagshubのインタラクティブなデモ
チュートリアル:カスタムデータセットでYolov6をトレーニングする方法
YouTubeチュートリアル:カスタムデータセットでYolov6をトレーニングする方法
Google ColabでのYolov6推論のデモ
ブログ投稿:Yolov6オブジェクトの検出 - 論文の説明と推論
ご質問がある場合は、WeChatグループに参加して話し合い、交換してください。



