speed camera
1.0.0
Speed-Cam.py Ver 11.26及更大的現在將在Raspberry Pi Os Bullseye或以後使用PI攝像機模塊以及USBCAM和IP/RTSP攝像機運行。對於PICAMERA支持運行sudo raspi-config ,接口選項,然後啟用/禁用舊版攝像頭選項並重新啟動。
重要的是- 將不會作為raspbian sudo apt-get更新和sudo apt-get升級作為一部分
Speed-install.sh ,強烈建議您在安裝之前運行這些操作,以確保您的系統是最新的。
在下面的代碼框的右側按GITHUB複製圖標。
或用鼠標左鍵突出顯示捲曲命令在下面的代碼框中。右鍵單擊“突出顯示區域”中的鼠標,然後選擇副本。
curl -L https://raw.github.com/pageauc/speed-camera/master/speed-install.sh | bash
在RPI PUTTY SSH或終端會話中,請右鍵單擊,選擇粘貼,然後輸入以下載並運行腳本。
這將下載並運行speed-install.sh腳本。如果在python3下運行,則如果未安裝,則需要安裝OpenCV3。如果您需要編譯OpENCV,請參閱菜單驅動的compencv3從源項目中查看我的github repo
版本13.05是主要的速度攝像頭修訂版。相機線程代碼現在由strmcam.py模塊處理。 config.py變量名稱已更改,因此您需要備份和cp config.py.new config.py(詳細信息請參見下文)
重要的是:所有設置均在config.py中。升級到VER 13.05或更高時,您可以刪除ConfigCam.py。插件現在工作。您可以自定義插件文件以適合所需或創建自己的插件。如果要升級,則應刪除,請移動舊插件,以便在升級期間下載新插件。如果您發現錯誤或問題,請發布GitHub問題。克勞德
重要的速度-CAM.PY VER 8.X或更高的需要更新的Config.py和插件。
cd ~/speed-camera
cp config.py config.py.bak
cp config.py.new config.py
替換插件重命名(或刪除)插件文件夾,下面
cd ~/speed-camera
mv plugins pluginsold # renames plugins folder
rm -r plugins # deletes plugins folder
然後運行menubox.sh升級菜單選擇。
請參閱Windows 10/11或Apple Mac Docker安裝快速啟動
或Windows或Unix發行版安裝沒有Docker
這是一個覆盆子PI,Windows,Unix發行計算機OPENCV對象速度相機演示程序。它用Python編寫,並使用OpenCV來檢測和跟踪最小像素區域上方相機視圖中最大移動對象的X,y坐標。
用戶變量存儲在config.py文件中。運動檢測僅限於mo_crop_y_upper , mo_crop_y_lower , mo_crop_x_left , mo_crop_x_right變量(路或感興趣的區域)。 mo_crop_auto_on = true覆蓋手動設置,並將根據圖像大小自動計算一個粗糙的裁剪區域。運動跟踪由config.py中的mo_track_event_count變量控制。這設置了軌道事件的數量和像素的軌道長度。這可能需要調整為相機視圖,CPU速度等。速度是根據cal_obj_px_和cal_obj_mm_的L2R和R2L運動方向計算的。視頻流幀映像將被捕獲並保存在媒體/圖像日期的子文件夾中(可選)每個變量IM_SUBDIR_MAX_FIELS = 2000有關變量設置詳細信息,請參見Config.py文件。
如果log_data_to_csv = true ,則將使用存儲在CSV(Comma分離值)格式中的事件數據創建/更新speed-cam.csv文件。可以將其導入到電子表格,數據庫等程序中,以進行進一步處理。版本8.9添加了一個SQLITE3數據庫來存儲速度數據。默認值是data/speed_cam.db,其中包含速度表中的數據。數據庫設置可以從config.py管理。數據庫是從config.py設置自動創建的。有關更多詳細信息,請參閱如何管理SQLITE3數據庫
Raspberry Pi計算機和已安裝的RPI攝像頭模塊或USB攝像頭插入了。確保測試硬件並有效。大多數RPI型號都可以正常工作。四方核RPI將由於螺紋而大大提高性能。建議使用最近版的Raspbian操作系統。
或者
MS Windows或Unix Distro計算機,帶有USB Web攝像頭插入並安裝了最新版本的Python,請參閱Wiki詳細信息。
建議您升級到OPENCV版本3.xx,以簡化opencv 3.4.2的源
對於Windows或Unix計算機平台(非RPI或Debian),請確保您擁有最新的Python版本。要下載並安裝Python和OpenCV
最新的Python版本包括運行此代碼所需的Numpy和最近的OpenCV版本。您還需要安裝和工作USB Web攝像頭。要安裝此程序,請訪問https://github.com/pageauc/speed-camera的GitHub項目頁面,選擇“綠色克隆”或“下載”按鈕。這些文件將被克隆或拉鍊到速度相機文件夾中。您可以從Python IDLE應用程序(推薦),GUI桌面或命令提示終端窗口運行代碼。注意bash .sh shell腳本將無法與Windows一起使用,除非為Windows安裝了對Bash的特殊支持,例如http://win-bash.sourceforge.net/ http://www.cygwin.com/注意:我尚未對其進行測試。
快速攝像機支持Docker安裝
Apple Macintosh根據系統要求和說明
和
Microsoft Windows 10/11 64位,啟用了BIOS虛擬化和Microsoft Windows子系統,用於Linux WSL 2每個系統要求和說明。
config/config.py從登錄中的RPI SSH會話或控制台終端執行以下操作。允許您在運行之前查看安裝代碼
cd ~
wget https://raw.github.com/pageauc/speed-camera/master/speed-install.sh
more speed-install.sh # You can review code if you wish
chmod +x speed-install.sh
./speed-install.sh # runs install script.
cd ~/speed-camera
./speed-cam.py
請查看如何運行速度-CAM.PY WIKI部分
重要的速度攝像頭將以calibrate_on = true模式開始。
根據需要在Config.py文件中查看設置,並用Nano編輯變量。您將需要執行校準以設置config.py cal_obj_px_和cal_obj_mm_的正確值,用於L2R和R2L方向。變量基於從相機到以速度測量對象的距離。有關更多詳細信息,請參見校準程序。
可以為您的系統和OPENCV版本調整config.py運動跟踪變量,稱為track_counter =。默認值為5,但是Quad Core RPI3和最新的OPENCV版本EG 3.4.2可以是10-15或更大。這將需要監視詳細日誌消息以微調。
cd ~/speed-camera
./menubox.sh
使用Menubox.SH更容易使用管理速度攝像頭(一旦校準和/或測試完成) 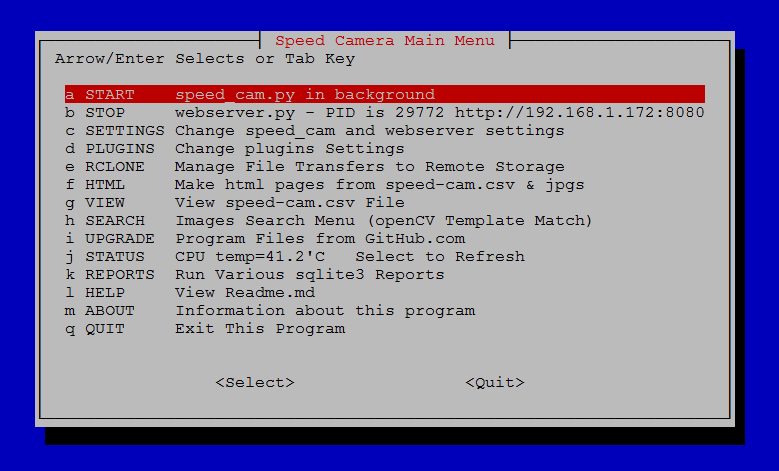
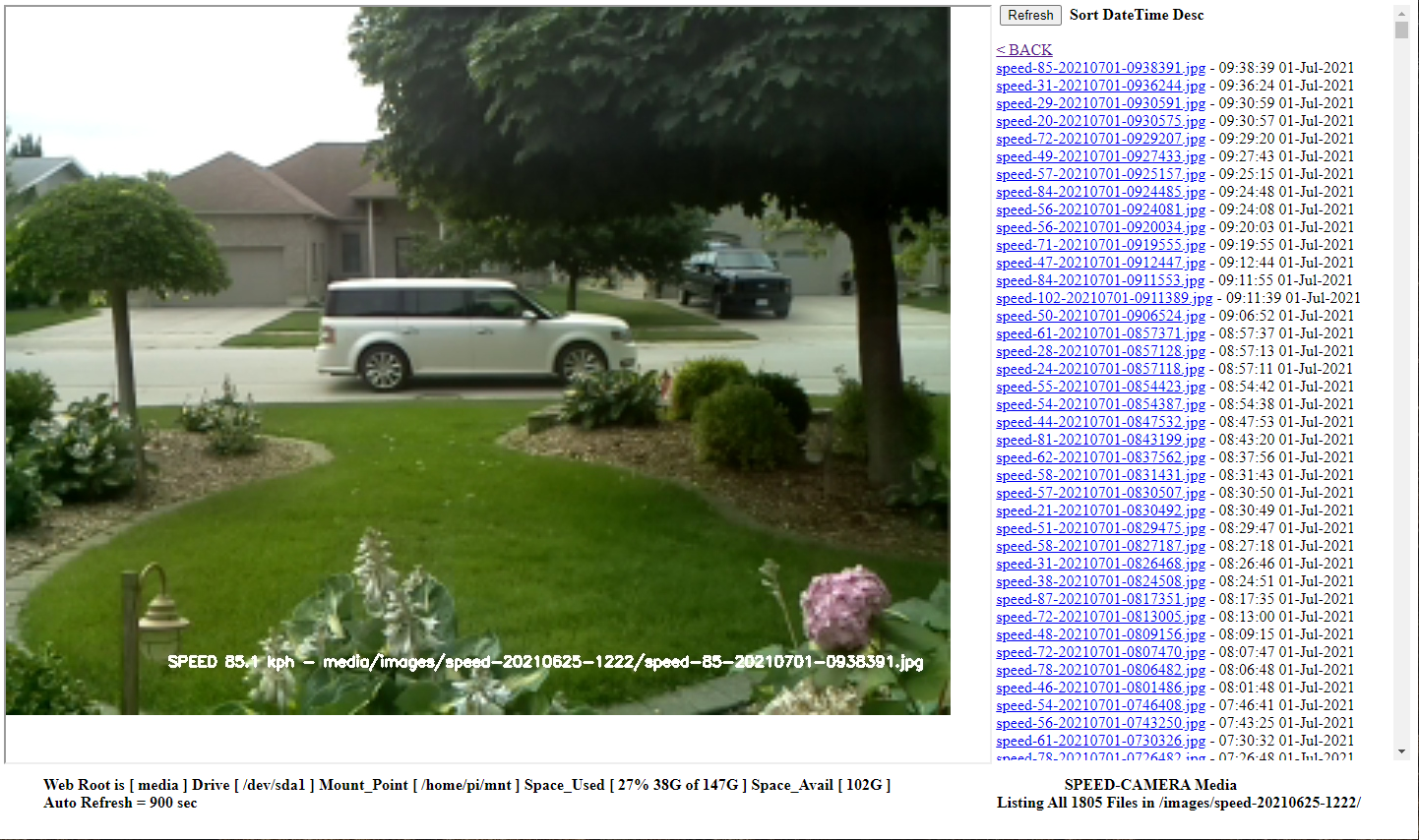
每個示例屏幕截圖從Web瀏覽器中查看速度攝像頭數據和趨勢。這些可以從Menubox.SH菜單選擇或通過Console或Crontab計劃運行腳本生成。
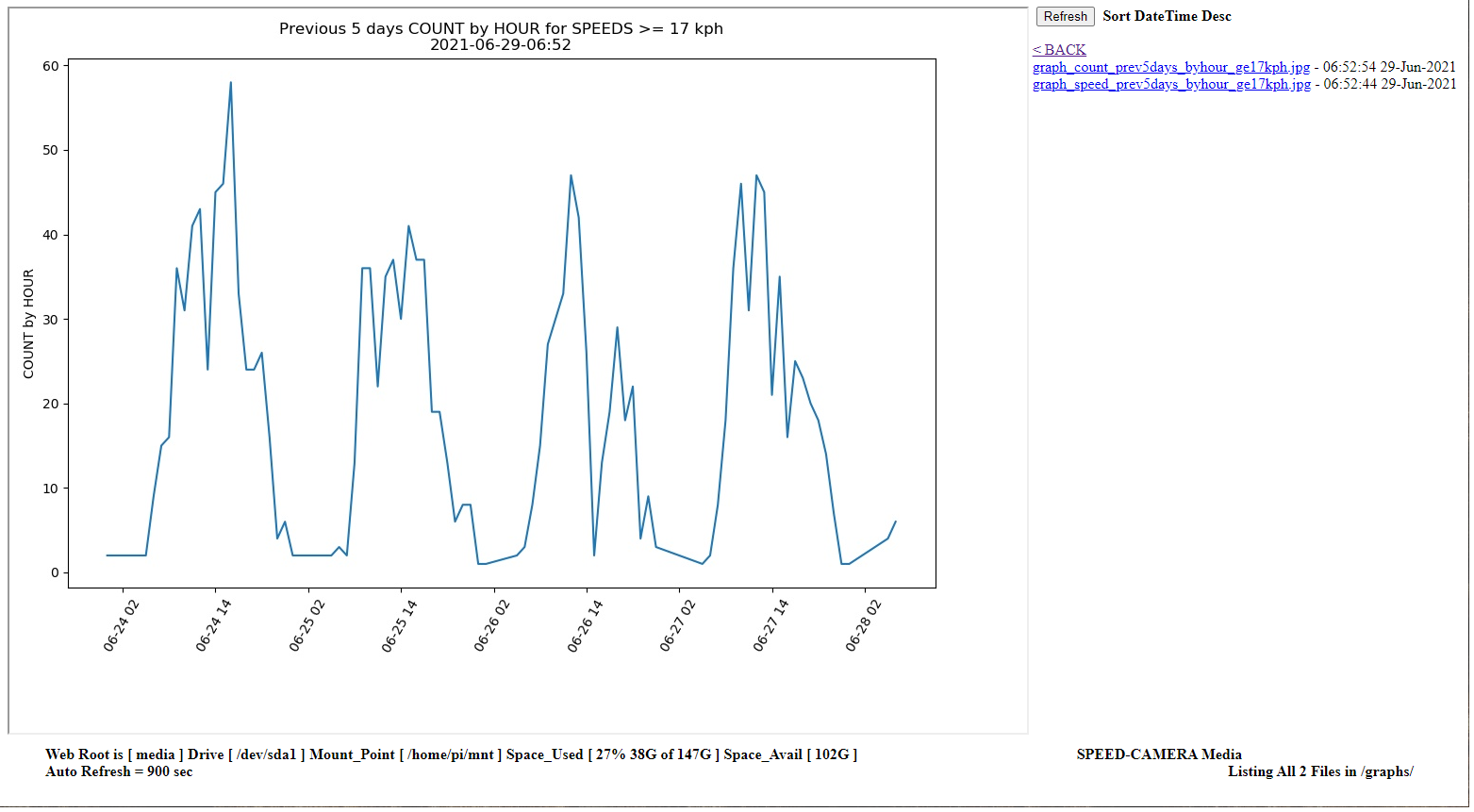
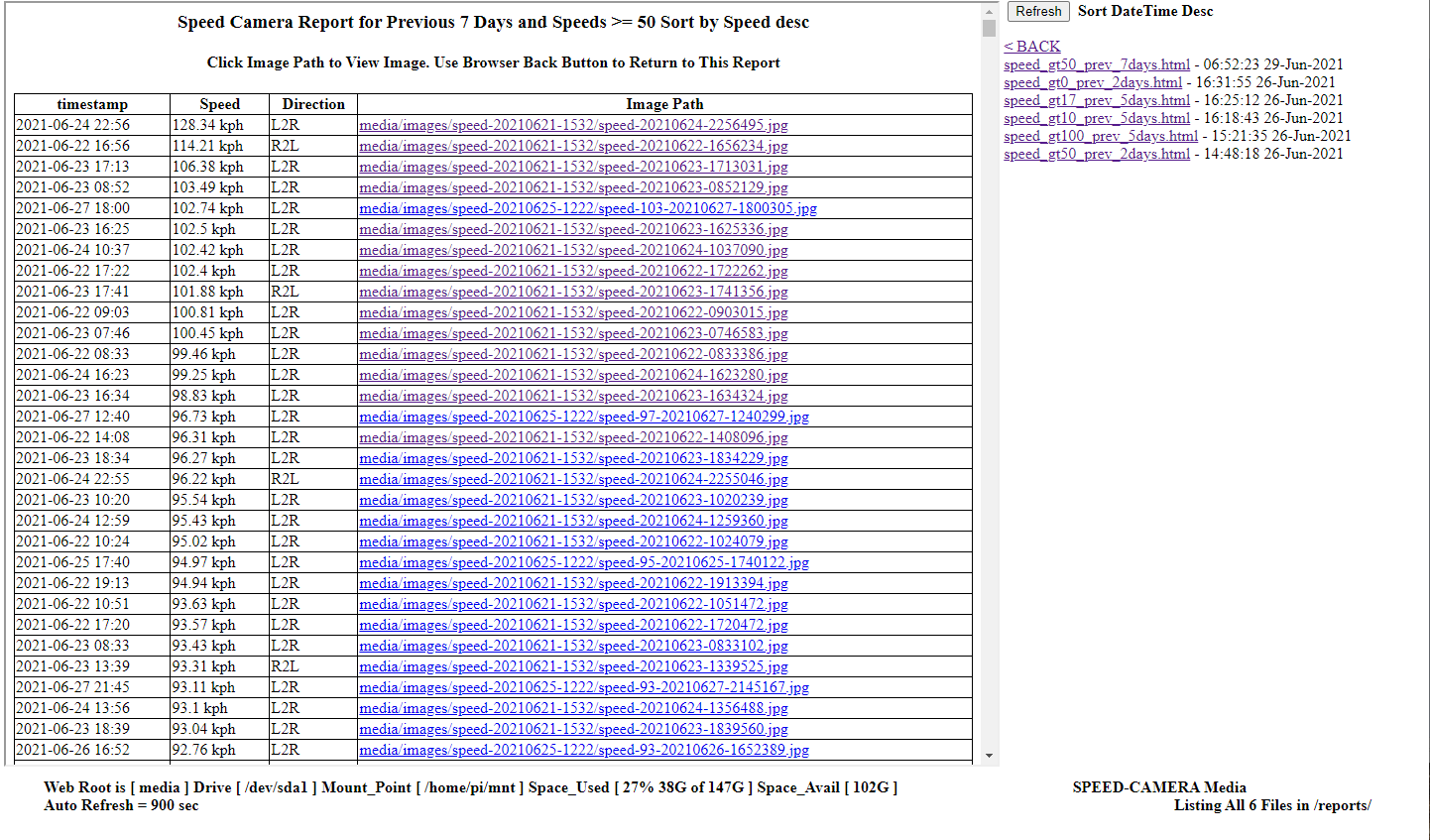

您可以直接從速度Web瀏覽器頁面查看最新圖像或歷史圖像。這些是動態創建的,並顯示最新的圖像。按下網頁刷新按鈕更新顯示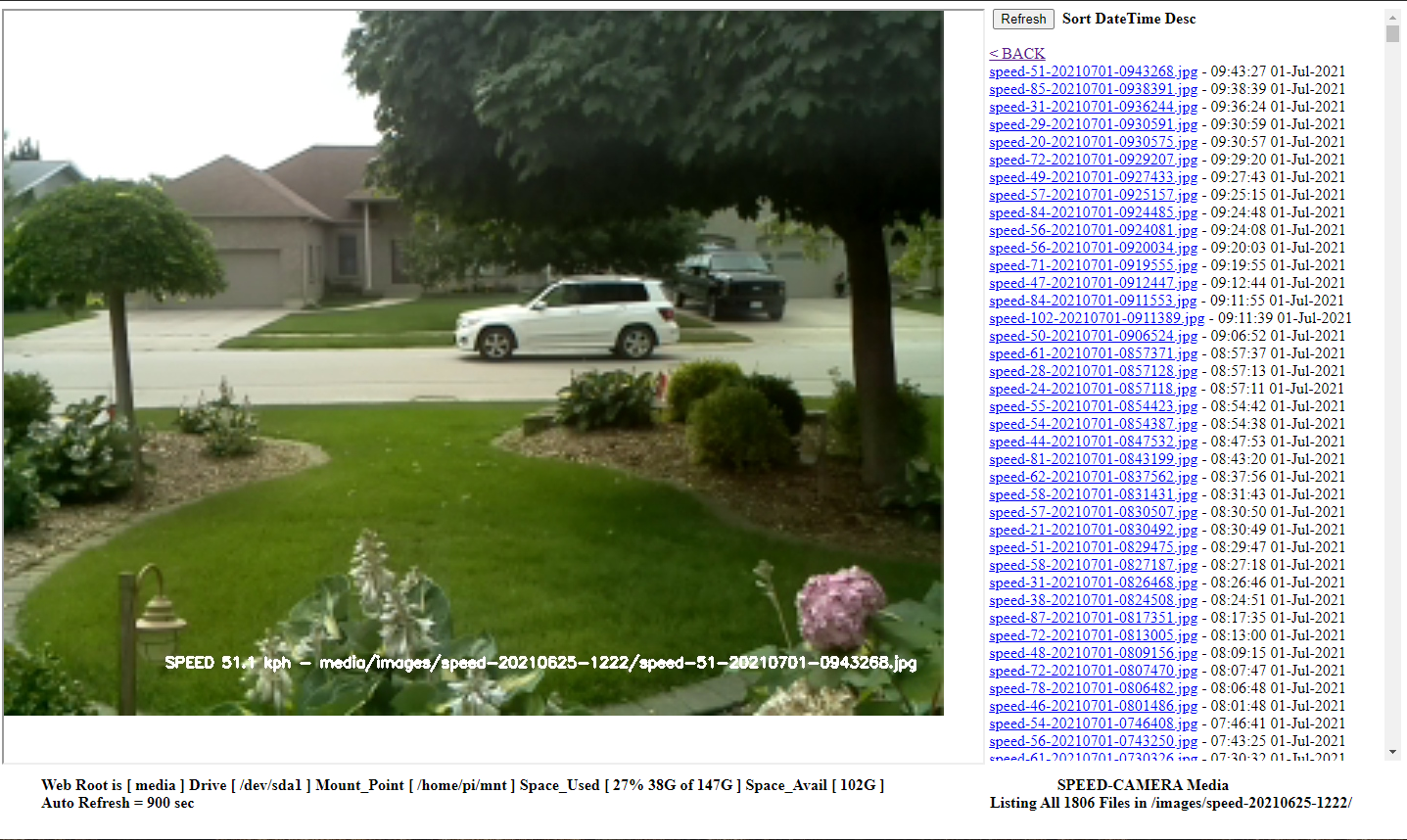
其中一些代碼基於Kyle Hounslow的YouTube教程,此處使用C https://www.youtube.com/watch?v=x6rpdrzzgjg?
感謝Adrian Rosebrock Jrosebr1的http://www.pyimagesearch.com,請訪問https://github.com/jrosebr1/imutils/imutils/blob/blob/master/master/master/imutils/imutils/video/pivideo/pivideostream.py.py-pypivideostream類代碼
玩得開心
克勞德·帕戈(Claude Pageau)
YouTube頻道https://www.youtube.com/user/pageaucp
github repo https://github.com/pageauc


