speed camera
1.0.0
Speed-cam.py Ver 11.26 и больше будут работать под Raspberry Pi OS Bullseye или позже с модулем PI камеры, а также USBCAM и IP/RTSP. Для поддержки Picamera запустить Sudo Raspi-Config , параметры интерфейса, затем включите/отключите опцию устаревшей камеры и перезагрузите.
Важно -Raspbian Sudo Apt-Get Update и обновление Sudo Apt-Get не будут выполняться как часть
Speed-install.sh , поэтому настоятельно рекомендуется запустить их перед установкой, чтобы убедиться, что ваша система будет актуальна.
Нажмите значок копирования GitHub в правой части кода ниже.
Или с левой кнопкой мыши. Щелкните правой кнопкой мыши в выделенной области и выберите Copy.
curl -L https://raw.github.com/pageauc/speed-camera/master/speed-install.sh | bash
В RPI Pulty SSH или сеансе терминала щелкните правой кнопкой мыши, выберите «Вставь», затем введите, чтобы загрузить и запустить скрипт.
Это загрузит и запустит скрипт Speed-install.sh . Если вы работаете под Python3, вам понадобится установлен OpenCV3, если он не будет установлен. Если вам нужно скомпилировать OpenCV, см. My GitHub Repo на меню, управляемое Compile OpenCV3 из Source Project
Версия 13.05 является основной ревизией камеры скорости. Код потока камеры теперь обрабатывается модулем strmcam.py. Имена переменных конфигурации.
Важно : все настройки находятся в config.py. Вы можете удалить configcam.py, если он существует, после обновления до версии 13.05 или более. Плагины сейчас работают. Вы можете настроить файлы плагина в соответствии с вами или создать свои собственные. Если вы обновляетесь, вы должны удалить, переместите старые плагины, чтобы новые были загружены во время обновления. Пожалуйста, опубликуйте проблему GitHub, если вы найдете ошибку или проблему. Клод
Важный скоростной cam.py ver 8.x или больше требует обновленных config.py и плагинов.
cd ~/speed-camera
cp config.py config.py.bak
cp config.py.new config.py
Чтобы заменить плагины переименовать (или удалить) папку плагинов на ниже
cd ~/speed-camera
mv plugins pluginsold # renames plugins folder
rm -r plugins # deletes plugins folder
Затем запустите Menubox.sh Menu Menu Pick.
См. Windows 10/11 или Apple Mac Docker Установите быстрое запуск
или Windows или Unix Distro установки без докера
Это Raspberry Pi, Windows, Unix Distro Computer Opencv Объект Скорость демонстрации камеры. Он записан на Python и использует OpenCV для обнаружения и отслеживания x, y координат самого большого движущегося объекта в виде камеры над минимальной областью пикселя.
Пользовательские переменные хранятся в файле config.py . Обнаружение движения ограничено между mo_crop_y_upper , mo_crop_y_lower , mo_crop_x_left , переменные mo_crop_x_right (дорога или интересующая область). MO_CROP_AUTO_ON = TRUE переопределение ручных настроек и будет автоматически рассчитать грубую площадь обрезки на основе размера изображения. Отслеживание движения контролируется переменной mo_track_event_count в config.py. Это устанавливает количество событий трека и длину дорожки в пикселях. Это может потребоваться настроить для представления камеры, скорости процессора и т. Д. Скорость рассчитывается на основе переменных CAL_OBJ_PX_ и CAL_OBJ_MM_ для направления движения L2R и R2L. Видеопоточное изображение будет снимается и сохраняется в носителях/изображениях, датированных подпапками (необязательно) на переменную IM_SUBDIR_MAX_FILES = 2000 для деталей настройки переменной см. Файл config.py.
Если log_data_to_csv = true, то файл speed-cam.csv будет создан/обновлен с помощью данных события, хранящиеся в формате CSV (разделенные запятые значения). Это может быть импортировано в электронную таблицу, базу данных и т. Д. Для дальнейшей обработки. Выпуск 8.9 добавляет базу данных SQLITE3 для хранения данных о скорости. По умолчанию DATA/SPEED_CAM.DB с данными в таблице скорости . Настройка базы данных можно управлять с config.py. База данных автоматически создается из настроек config.py. Для получения более подробной информации см. Как управлять базой данных SQLITE3
Компьютер Raspberry Pi и модуль камеры RPI или USB -камера подключена. Убедитесь, что аппаратное обеспечение протестировано и работает. Большинство моделей RPI будут работать нормально. Четверть основной RPI значительно улучшит производительность благодаря резьбе. Рекомендуется недавняя версия операционной системы Raspbian.
или
MS Windows или Unix Distro Computer с USB -веб -камерой подключена и недавней версией Python, установленной для получения подробной информации, см. Подробности вики .
Рекомендуется обновить до версии OpenCV 3.xx для легкой компиляции OpenCV 3.4.2 из источника см. Https://github.com/pageauc/opencv3-setup
Для компьютерных платформ Windows или Unix (не RPI или Debian) убедитесь, что у вас есть самая современная версия Python. Для загрузки и установки Python и OpenCV
Последние версии Python включают Numpy и недавнюю версию OpenCV, которая требуется для запуска этого кода. Вам также понадобится USB -веб -камера, установленная и работающая. Чтобы установить эту программу, доступ к странице проекта Github по адресу https://github.com/pageauc/speed-camera, выберите зеленый клон или кнопку загрузки . Файлы будут клонированы или застегнуты в папку скорости камеры. Вы можете запустить код из приложения Python idle (рекомендуется), окна настольного управления GUI или командной строки. Примечание Bash .sh Shell Scripts не будет работать с Windows, если только специальная поддержка для Bash не будет установлена для Windows EG http://win-bash.sourceforge.net/ http://www.cygwin.com/ Примечание: я не протестировал их.
скорость камера поддерживает установку Docker на
Apple Macintosh на системные требования и инструкции
и
Microsoft Windows 10/11 64 -бит с включенной виртуализацией BIOS и подсистемой Microsoft Windows для Linux WSL 2 за системные требования и инструкции.
config/config.pyИз зарегистрированного в сеансе RPI SSH или консольной терминале выполните следующее. Позволяет просмотреть код установки перед запуском
cd ~
wget https://raw.github.com/pageauc/speed-camera/master/speed-install.sh
more speed-install.sh # You can review code if you wish
chmod +x speed-install.sh
./speed-install.sh # runs install script.
cd ~/speed-camera
./speed-cam.py
Смотрите , как запустить Speed-cam.py Viki Section
Важная скоростная камера начнется в режиме calibrate_on = true .
Просмотрите настройки в файле config.py и редактируйте переменные с Nano по мере необходимости. Вам нужно будет выполнить калибровку, чтобы установить правильное значение для config.py cal_obj_px_ и cal_obj_mm_ для направлений L2R и R2L. Переменные основаны на расстоянии от камеры до объектов, измеряемых для скорости. См. Процедуру калибровки для более подробной информации.
Переменная отслеживания движения config.py под названием Track_counter = может быть настроена для вашей системы и версии OpenCV. По умолчанию 5, но четырехъядерный RPI3 и последняя версия OpenCV, например 3.4.2, может быть 10-15 или, возможно, больше. Это потребует мониторинга сообщений журнала Verbose для точной настройки.
cd ~/speed-camera
./menubox.sh
Административная скоростная кама с использованием menubox.sh (после калибровки и/или тестирования завершена) 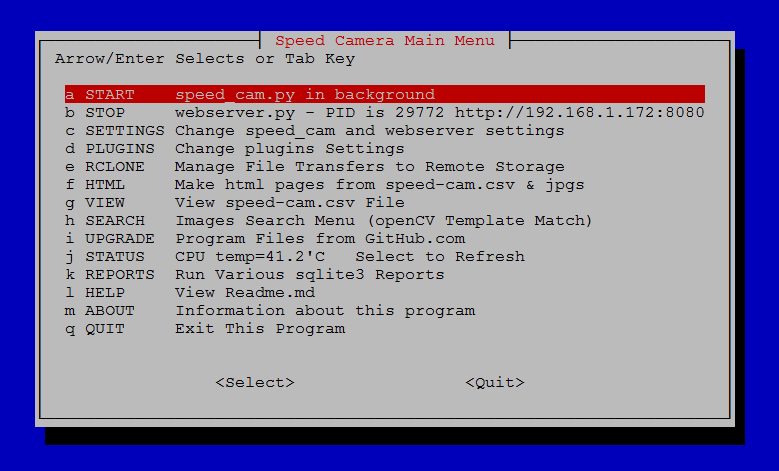
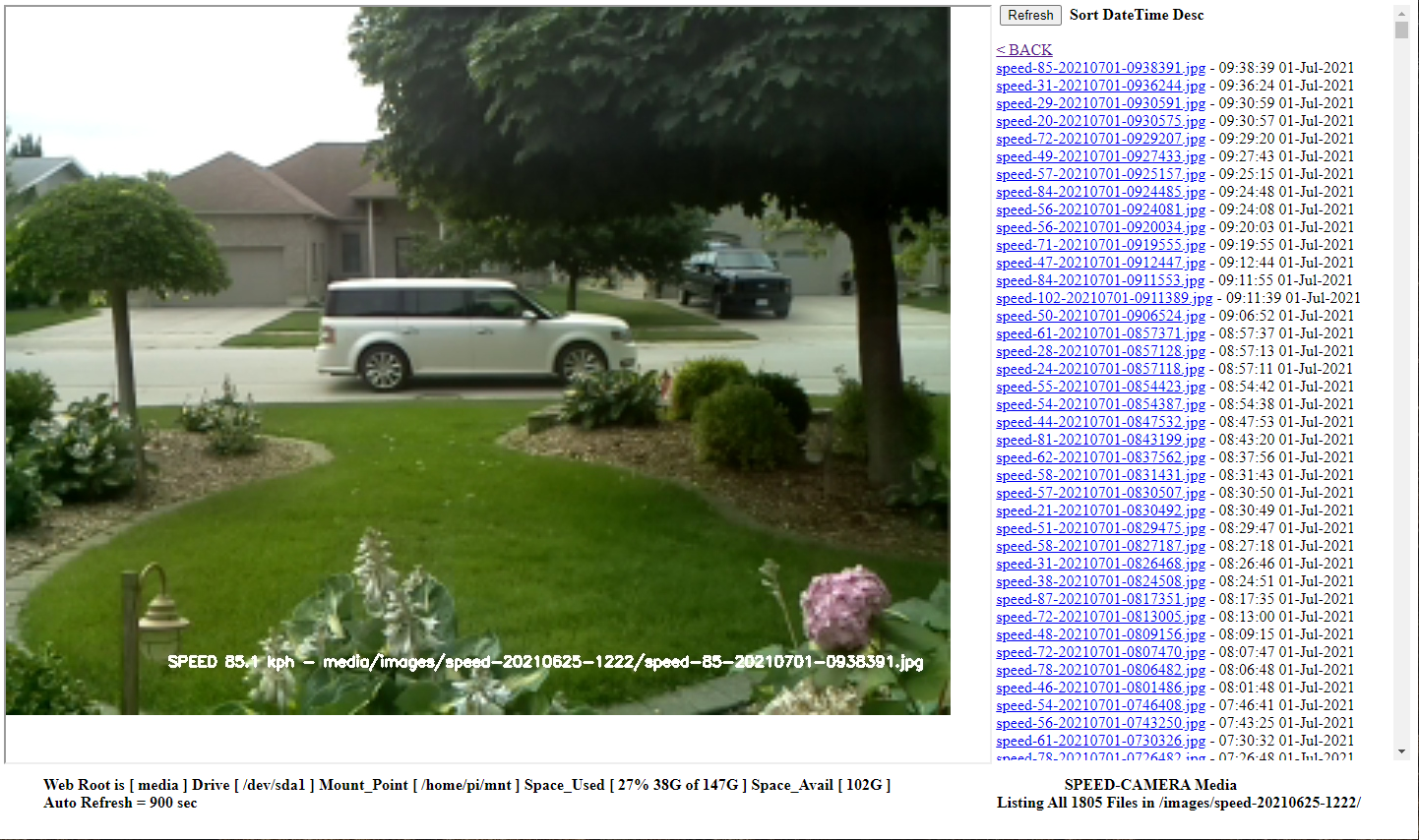
Просмотреть данные о скорости-каме и тенденции из веб-браузера на выборочные снимки экрана. Они могут быть сгенерированы из меню Menubox.sh или путем запуска сценариев из консоли или по расписанию Crontab.
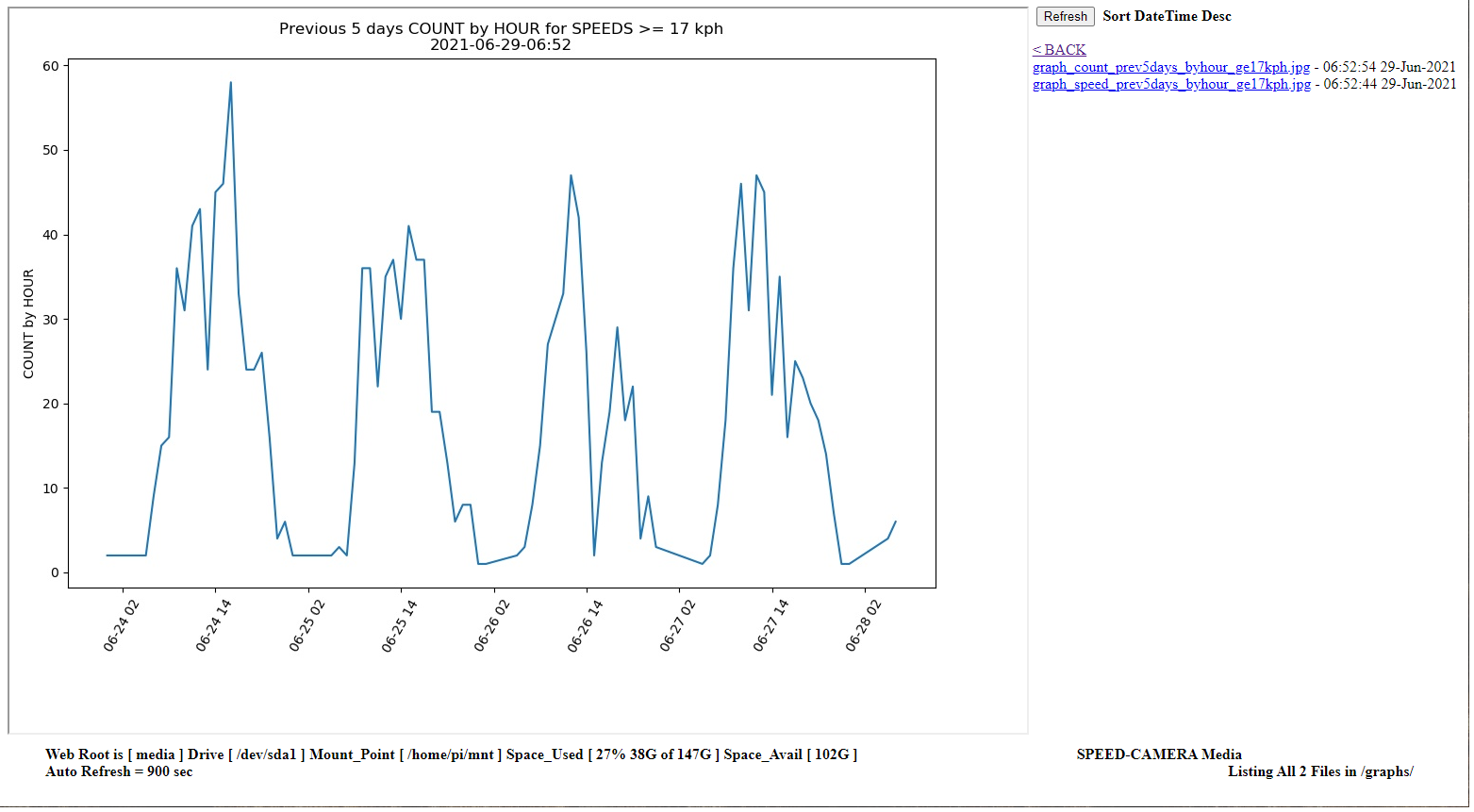
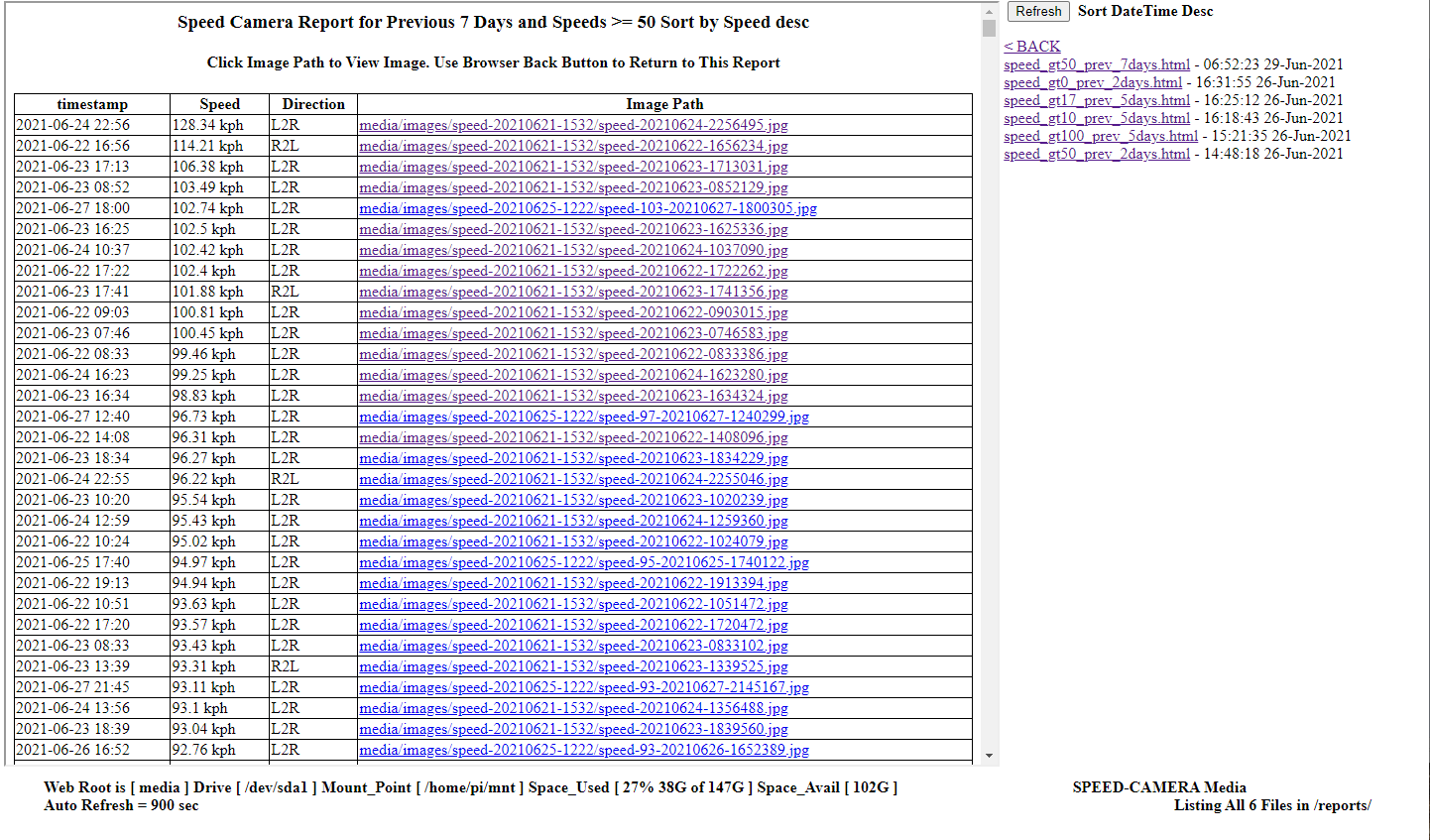

Вы можете просмотреть недавние или исторические изображения непосредственно со страницы веб -браузера Speed. Они динамически созданы и отображаются актуальные изображения. Нажмите кнопку обновления веб -страницы, чтобы обновить отображение 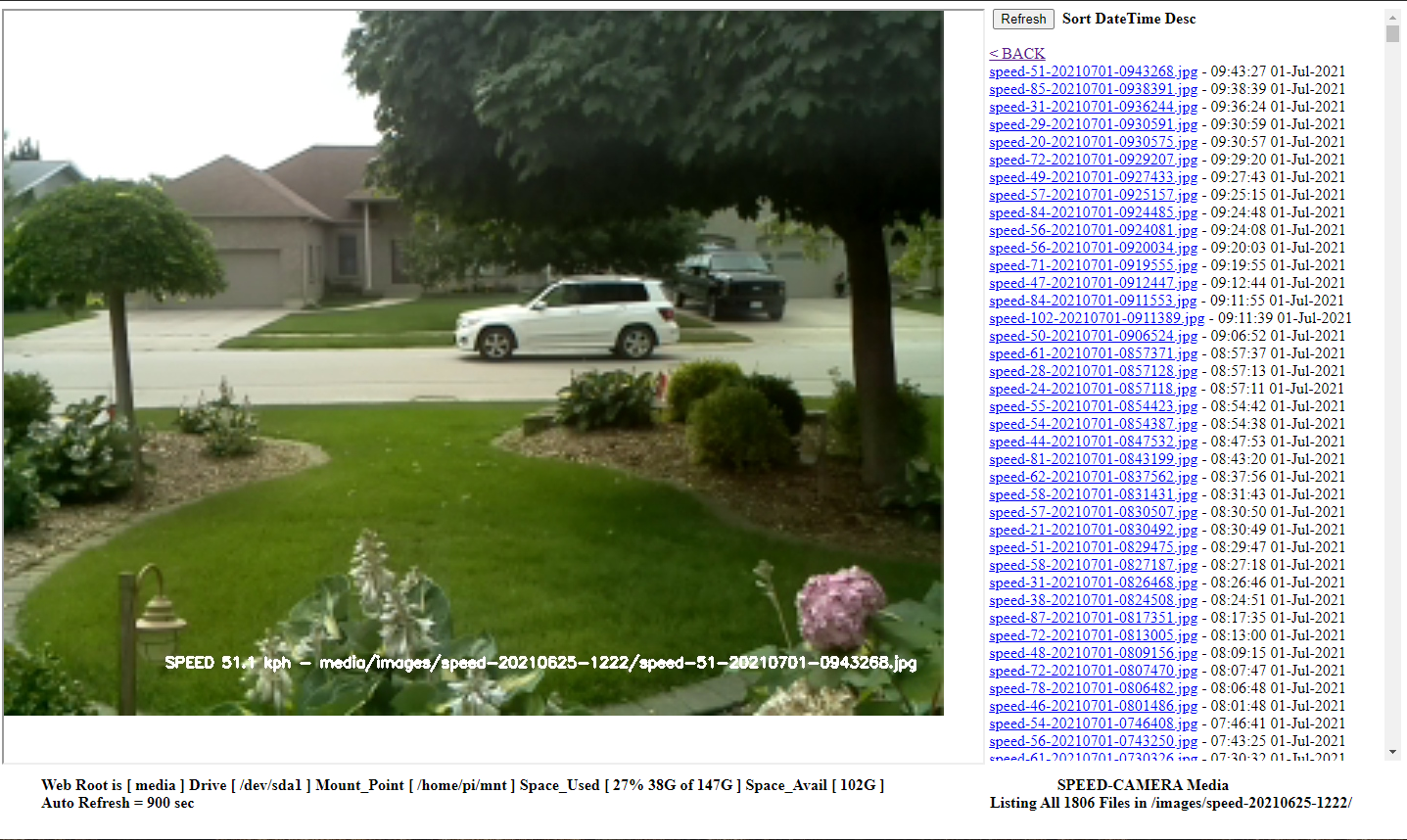
Некоторые из этого кода основаны на учебном пособии на YouTube Кайлом Хунслоу с использованием c здесь https://www.youtube.com/watch?v=x6rpdrzzgjg
Спасибо Adrian Rosebrock Jrosebr1 на http://www.pyimagesearch.com для кода класса PivideoStream, доступный на hithub по адресу https://github.com/jrosebr1/imutils/blob/master/imutils/video/pivideStream.py
Веселиться
Клод Паго
Канал YouTube https://www.youtube.com/user/pageaucp
Github Repo https://github.com/pageauc


