speed camera
1.0.0
Speed-cam.py ver 11.26 dan Greater sekarang akan berjalan di bawah raspberry pi os bullseye atau lebih lambat dengan modul kamera PI serta kamera USBCAM dan IP/RTSP. Untuk dukungan picamera jalankan sudo raspi-config , opsi antarmuka, kemudian mengaktifkan/menonaktifkan opsi dan reboot kamera lama.
PENTING - Pembaruan APT-get sudo raspbian dan upgrade sudo apt-get tidak akan dilakukan sebagai bagian dari
speed-install.sh sehingga sangat disarankan Anda menjalankan ini sebelum menginstal untuk memastikan sistem Anda terkini.
Tekan Ikon Salin GitHub di sisi kanan kotak kode di bawah ini.
atau dengan mouse kid Anda sorot perintah curl di kotak kode di bawah ini. Mouse klik kanan di area yang disorot dan pilih Salin.
curl -L https://raw.github.com/pageauc/speed-camera/master/speed-install.sh | bash
Pada RPI Putty SSH atau Sesi Terminal Klik Kanan, pilih Tempel kemudian masukkan untuk mengunduh dan menjalankan skrip.
Ini akan mengunduh dan menjalankan skrip speed-install.sh . Jika berjalan di bawah python3 Anda akan perlu diinstal OpenCV3 jika tidak diinstal. Jika Anda perlu mengkompilasi opencv, lihat repo github saya di menu driven compile opencv3 dari proyek sumber
Versi 13.05 adalah revisi kamera kecepatan utama. Kode utas kamera sekarang ditangani oleh modul strmcam.py. nama variabel config.py telah berubah sehingga Anda perlu mencadangkan dan cp config.py.new config.py (lihat di bawah untuk detailnya)
PENTING : Semua pengaturan ada di config.py. Anda dapat menghapus configCam.py jika ada, setelah Anda memutakhirkan ke ver 13.05 atau lebih besar. Plugin sekarang berfungsi. Anda dapat menyesuaikan file plugin yang sesuai dengan yang Anda butuhkan atau buat sendiri. Jika Anda meningkatkan, Anda harus menghapus, memindahkan plugin lama sehingga yang baru akan diunduh selama peningkatan. Silakan posting masalah github jika Anda menemukan bug atau masalah. Claude
Speed-cam.py ver 8.x penting atau lebih besar membutuhkan config.py dan plugin yang diperbarui.
cd ~/speed-camera
cp config.py config.py.bak
cp config.py.new config.py
Untuk mengganti folder plugin ganti nama (atau hapus) plugin per di bawah ini
cd ~/speed-camera
mv plugins pluginsold # renames plugins folder
rm -r plugins # deletes plugins folder
Kemudian jalankan menu pemutakhiran Menubox.sh .
Lihat Windows 10/11 atau Apple Mac Docker Instal Start Quick
atau pemasangan distro Windows atau Unix tanpa Docker
Ini adalah Raspberry Pi, Windows, Unix Distro Computer Opencv Speed Camera Program Demo. Ini ditulis dalam Python dan menggunakan OpenCV untuk mendeteksi dan melacak koordinat X, Y dari objek bergerak terbesar dalam tampilan kamera di atas area piksel minimum.
Variabel pengguna disimpan dalam file config.py . Deteksi gerak dibatasi antara mo_crop_y_upper , mo_crop_y_lower , mo_crop_x_left , variabel mo_crop_x_right (jalan atau area yang menarik). Mo_crop_auto_on = TRUE Overrides Pengaturan manual dan akan secara otomatis menghitung area tanaman kasar berdasarkan ukuran gambar. Pelacakan gerak dikendalikan oleh variabel mo_track_event_count di config.py. Ini menetapkan jumlah acara trek dan panjang trek dalam piksel. Ini mungkin perlu disetel untuk tampilan kamera, kecepatan CPU, dll. Kecepatan dihitung berdasarkan cal_obj_px_ dan cal_obj_mm_ variabel untuk arah gerakan L2R dan R2L. Gambar bingkai aliran video akan ditangkap dan disimpan dalam media/gambar subfolder bertanggal (opsional) per variabel IM_SUBDIR_MAX_FILES = 2000 untuk rincian pengaturan variabel lihat file config.py.
Jika log_data_to_csv = true maka file speed-cam.csv akan dibuat/diperbarui dengan data acara yang disimpan dalam format CSV (nilai terpisah koma). Ini dapat diimpor ke program spreadsheet, database, dll untuk pemrosesan lebih lanjut. Rilis 8.9 Menambahkan database SQLITE3 untuk menyimpan data kecepatan. Default adalah data/speed_cam.db dengan data di tabel kecepatan . Pengaturan basis data dapat dikelola dari config.py. Database dibuat secara otomatis dari pengaturan config.py. Untuk detail lebih lanjut lihat Cara Mengelola Basis Data SQLITE3
Komputer Raspberry PI dan modul kamera RPI yang diinstal atau kamera USB terhubung. Pastikan perangkat keras diuji dan berfungsi. Sebagian besar model RPI akan berfungsi dengan baik. RPI quad core akan sangat meningkatkan kinerja karena threading. Direkomendasikan versi terbaru dari sistem operasi raspbian.
atau
MS Windows atau Unix Distro Computer dengan kamera web USB dicolokkan dan versi terbaru Python yang diinstal untuk detail lihat detail wiki .
Dianjurkan agar Anda meningkatkan ke OpenCV versi 3.xx untuk kompilasi mudah dari OpenCV 3.4.2 dari sumber lihat https://github.com/pageauc/opencv3-setup
Untuk platform komputer Windows atau UNIX (non RPI atau Debian) memastikan Anda memiliki versi Python terkini. Untuk mengunduh dan menginstal Python dan Opencv
Versi Python terbaru termasuk Numpy dan versi OpenCV terbaru yang diperlukan untuk menjalankan kode ini. Anda juga akan membutuhkan USB Web Cam yang diinstal dan berfungsi. Untuk menginstal program ini, akses halaman Proyek GitHub di https://github.com/pageauuc/speed-camera Pilih Klon Hijau atau Tombol Unduh . File-file tersebut akan dikloning atau di-ritsleting ke folder kamera kecepatan. Anda dapat menjalankan kode dari aplikasi Idle Python (disarankan), desktop GUI atau jendela terminal prompt perintah. Catatan Bash .sh skrip shell tidak akan berfungsi dengan windows kecuali dukungan khusus untuk bash diinstal untuk windows misalnya http://win-bash.sourceforge.net/ http://www.cygwin.com/ Catatan: Saya belum menguji ini.
Kamera cepat mendukung instalasi Docker di
Apple Macintosh per Persyaratan dan Instruksi Sistem
Dan
Microsoft Windows 10/11 64 bit dengan virtualisasi BIOS diaktifkan dan subsistem Microsoft Windows untuk Linux WSL 2 per persyaratan dan instruksi sistem.
config/config.pyDari login dalam sesi SSH RPI atau terminal konsol melakukan berikut ini. Memungkinkan Anda meninjau kode instal sebelum berjalan
cd ~
wget https://raw.github.com/pageauc/speed-camera/master/speed-install.sh
more speed-install.sh # You can review code if you wish
chmod +x speed-install.sh
./speed-install.sh # runs install script.
cd ~/speed-camera
./speed-cam.py
Lihat cara menjalankan bagian speed-cam.py wiki
Kamera Kecepatan Penting Akan Mulai Di Calibrate_on = Mode Benar .
Tinjau Pengaturan dalam File Config.py dan Edit Variabel dengan Nano sesuai kebutuhan. Anda perlu melakukan kalibrasi untuk mengatur nilai yang benar untuk config.py cal_obj_px_ dan cal_obj_mm_ untuk arah l2r dan r2l. Variabel didasarkan pada jarak dari kamera ke objek yang diukur untuk kecepatan. Lihat Prosedur Kalibrasi untuk lebih jelasnya.
Variabel pelacakan gerak config.py yang disebut track_counter = dapat disesuaikan untuk sistem Anda dan versi opencv. Default adalah 5 tetapi quad core RPI3 dan versi opencv terbaru misalnya 3.4.2 dapat 10-15 atau mungkin lebih besar. Ini akan membutuhkan pemantauan pesan log verbose untuk menyempurnakan.
cd ~/speed-camera
./menubox.sh
Admin speed-cam lebih mudah menggunakan menubox.sh (setelah dikalibrasi dan/atau pengujian selesai) 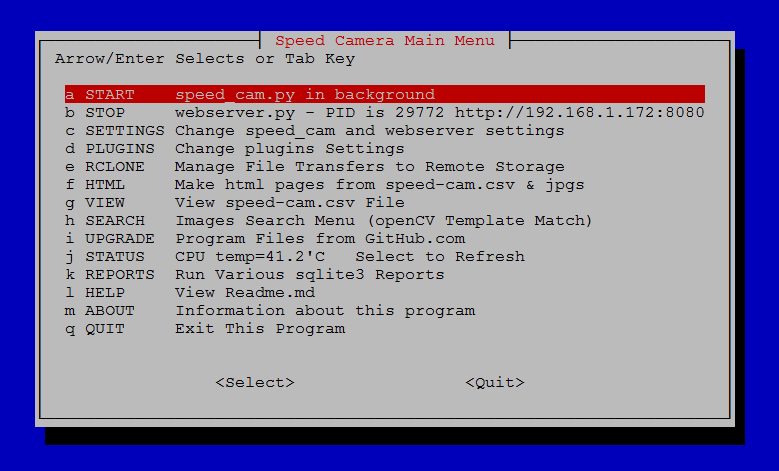
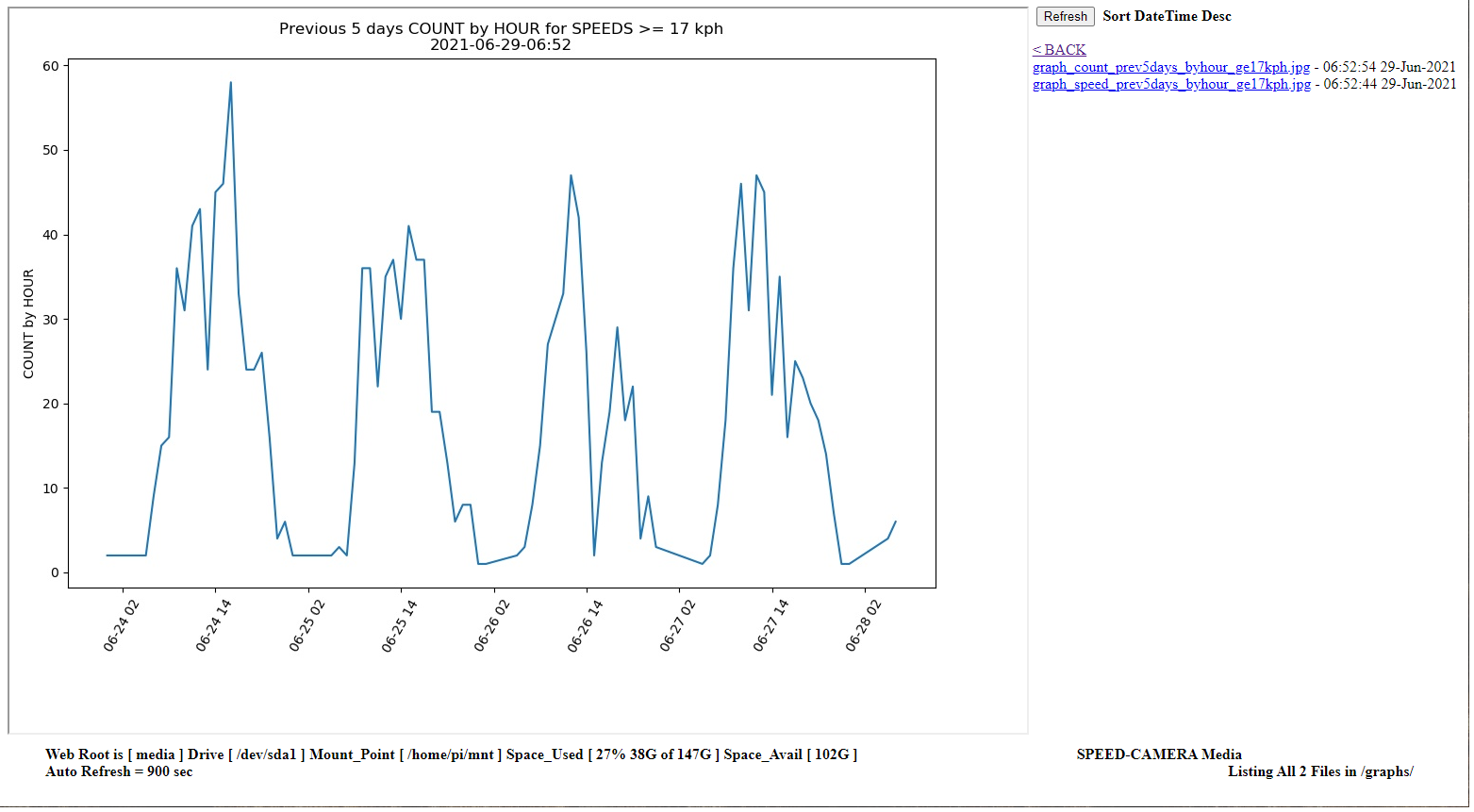
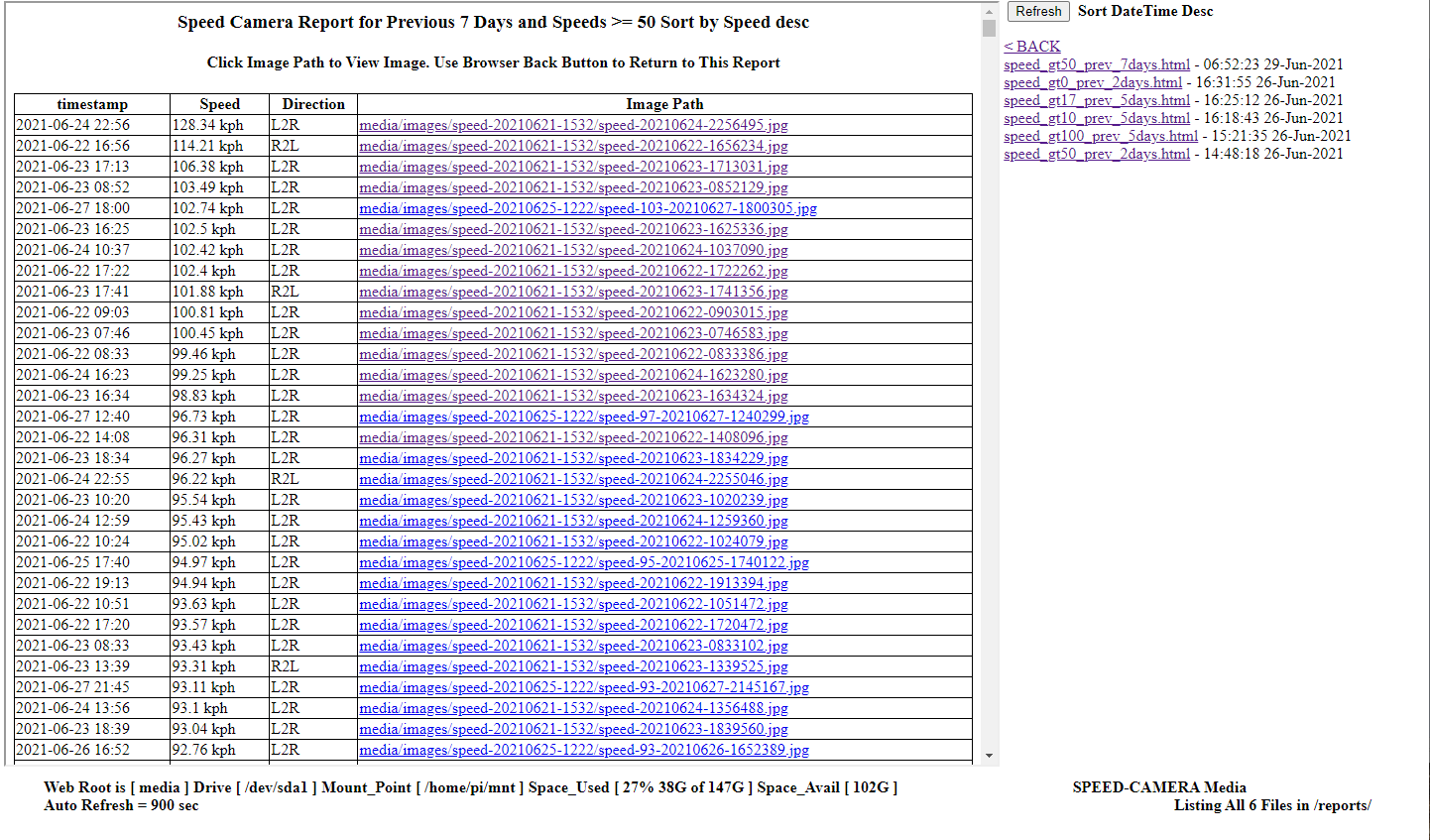
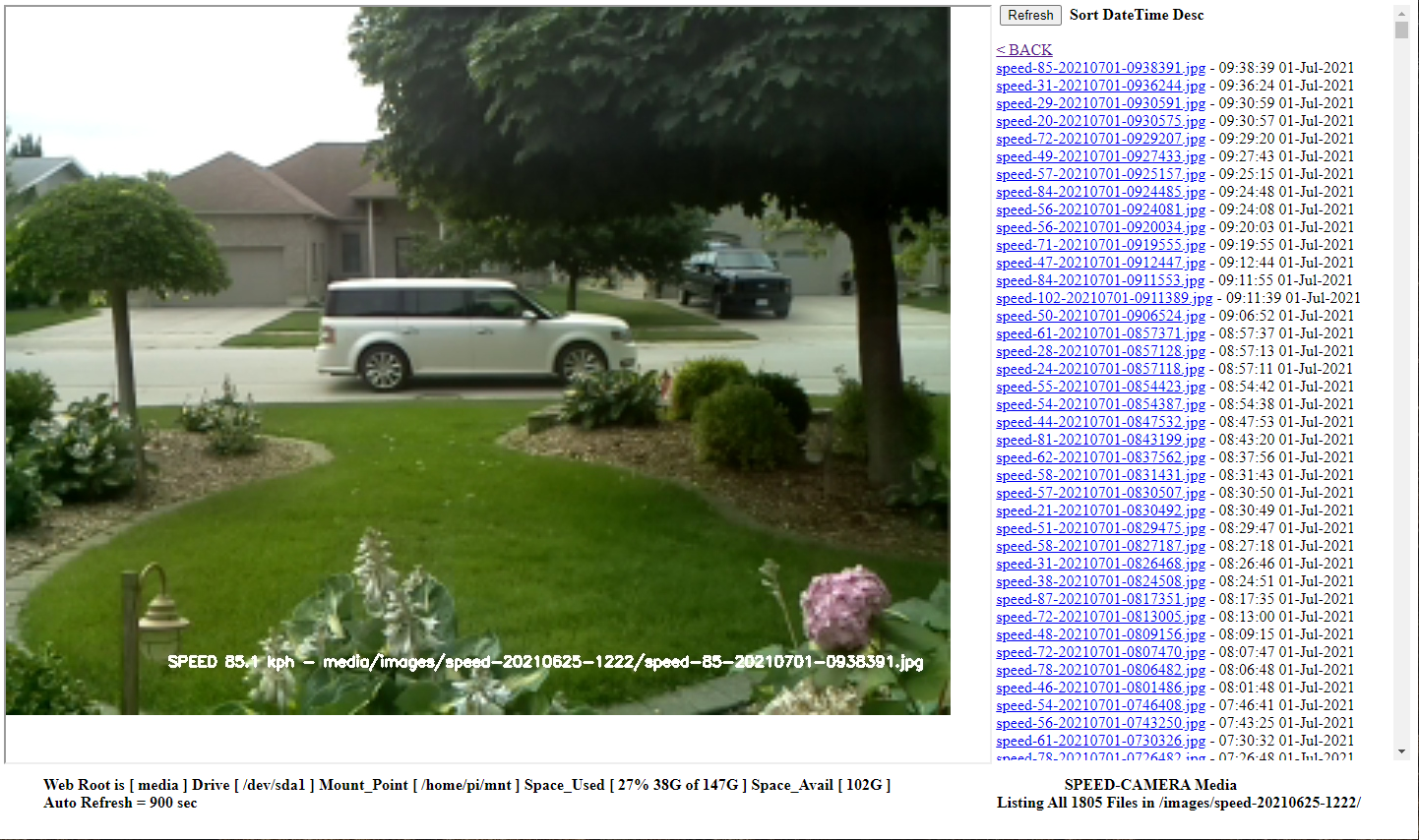
Lihat data dan tren speed-cam dari browser web per sampel sampel. Ini dapat dihasilkan dari menu pick menubox.sh atau dengan menjalankan skrip dari konsol atau melalui jadwal crontab.

Anda dapat melihat gambar terbaru atau historis langsung dari halaman Browser Web kecepatan. Ini dibuat secara dinamis dan menunjukkan gambar terkini. Tekan tombol Refresh Halaman Web untuk memperbarui tampilan 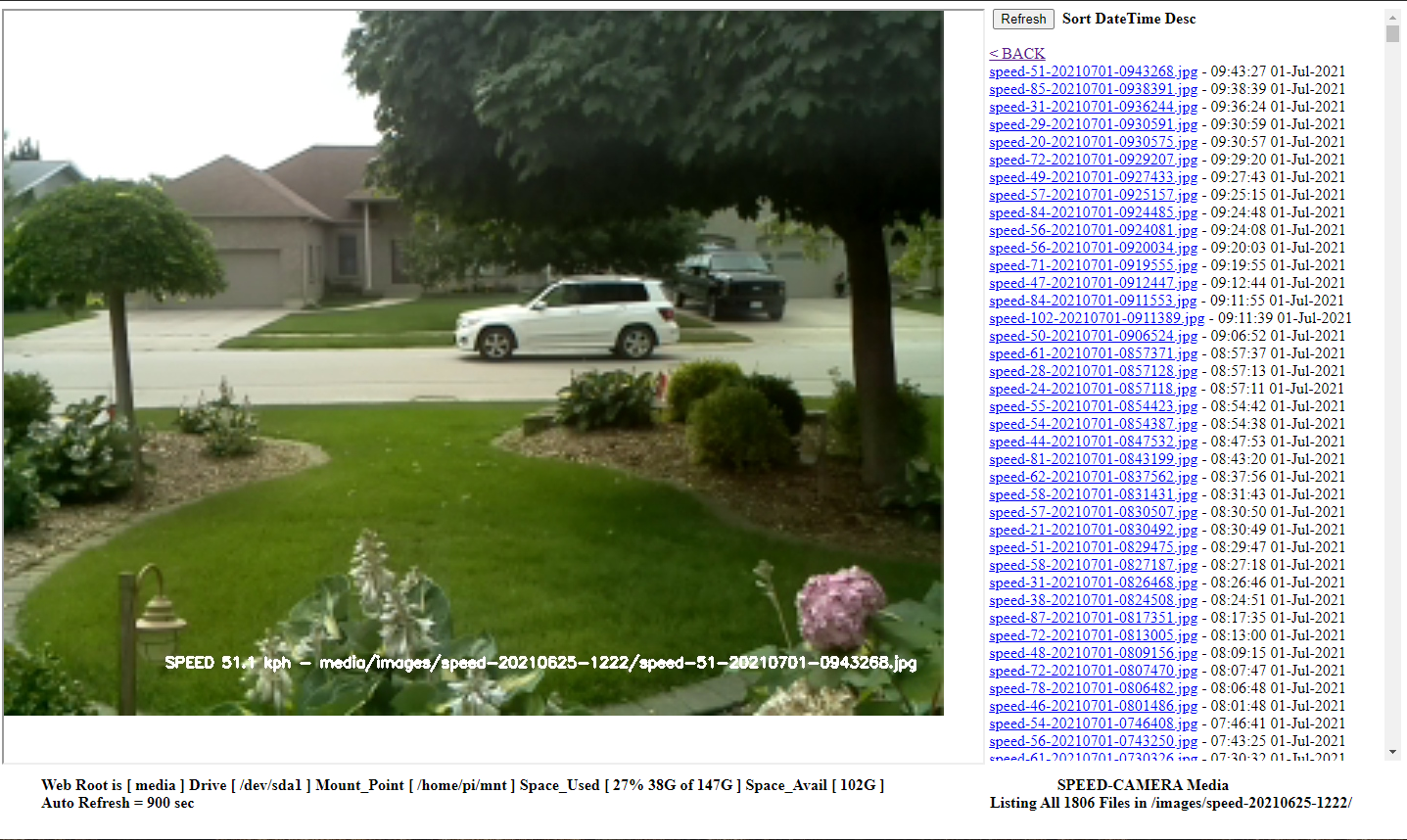
Beberapa kode ini didasarkan pada tutorial YouTube oleh Kyle Hounslow menggunakan C di sini https://www.youtube.com/watch?v=x6rpdrzzgjg
Terima kasih kepada Adrian Rosebrock JRosebr1 di http://www.pyimagesearch.com untuk kode kelas pivideostream yang tersedia di github di https://github.com/jrosebr1/imutils/blob/master/imutils/video/pivideostream.pys
Selamat bersenang-senang
Claude Pageau
Saluran YouTube https://www.youtube.com/user/pageAucp
Github repo https://github.com/pageAuc


