speed camera
1.0.0
Speed-Cam.py Ver 11.26 이상은 이제 Raspberry Pi OS Bullseye에서 USBCAM 및 IP/RTSP 카메라뿐만 아니라 PI 카메라 모듈로 실행됩니다. Picamera 지원 실행 실행 Sudo Raspi-Config , 인터페이스 옵션을 사용한 다음 레거시 카메라 옵션을 활성화/비활성화하고 재부팅하십시오.
중요 -Raspbian sudo apt-get 업데이트 및 Sudo apt-get 업그레이드는 의 일부로 수행되지 않습니다 .
Speed-Install.sh 시스템이 최신 상태인지 확인하기 전에 설치 전에 실행하는 것이 좋습니다.
아래 코드 박스 오른쪽에 Github 복사 아이콘을 누릅니다.
또는 마우스 왼쪽 버튼으로 아래 코드 박스에서 CURL 명령을 강조 표시하십시오. 강조 표시된 영역에서 마우스를 마우스 오른쪽 버튼으로 클릭하고 사본을 선택하십시오.
curl -L https://raw.github.com/pageauc/speed-camera/master/speed-install.sh | bash
RPI PUTTY SSH 또는 터미널 세션 마우스 오른쪽 버튼을 클릭 한 다음 페이스트를 선택한 다음 다운로드 및 실행 스크립트를 선택하십시오.
Speed-Install.sh 스크립트를 다운로드하여 실행합니다. Python3에서 실행되면 설치되지 않은 경우 OpenCV3 설치가 필요합니다. OpenCV를 컴파일 해야하는 경우 Menu Driven Compile Opencv3에서 내 Github Repo를 참조하십시오.
버전 13.05는 주요 속도 카메라 개정입니다. 카메라 스레드 코드는 이제 strmcam.py 모듈에 의해 처리됩니다. config.py 변수 이름이 변경되어 백업 및 CP Config.py.new Config.py가 필요합니다 (자세한 내용은 아래 참조).
중요 : 모든 설정은 config.py에 있습니다. ConfigCam.py가 존재하면 VER 13.05 이상으로 업그레이드하면 삭제할 수 있습니다. 이제 플러그인이 작동합니다. 필요에 맞게 플러그인 파일을 사용자 정의하거나 직접 만들 수 있습니다. 업그레이드하는 경우 삭제 해야하는 경우 업그레이드 중에 새로운 플러그인이 다운로드되도록 오래된 플러그인을 이동하십시오. 버그 나 문제가있는 경우 GitHub 문제를 게시하십시오. 클로드
중요한 Speed-Cam.py ver 8.x 이상은 업데이트 된 config.py 및 플러그인이 필요합니다.
cd ~/speed-camera
cp config.py config.py.bak
cp config.py.new config.py
플러그인을 교체하려면 아래당 플러그 이름 이름 바꾸기 (또는 삭제) 플러그인 폴더를 교체합니다.
cd ~/speed-camera
mv plugins pluginsold # renames plugins folder
rm -r plugins # deletes plugins folder
그런 다음 menubox.sh 업그레이드 메뉴 선택을 실행하십시오.
Windows 10/11 또는 Apple Mac Docker 참조 빠른 시작 설치
또는 Windows 또는 Unix 배포판은 Docker없이 설치됩니다
이것은 Raspberry Pi, Windows, Unix 배포판 컴퓨터 OpenCV 객체 속도 카메라 데모 프로그램입니다. Python으로 작성되었으며 OpenCV를 사용하여 최소 픽셀 영역 위의 카메라보기에서 가장 큰 움직이는 물체의 X, Y 좌표를 감지하고 추적합니다.
사용자 변수는 config.py 파일에 저장됩니다. 모션 감지는 MO_CROP_Y_UPPER , MO_CROP_Y_LOWER , MO_CROP_X_LEFT , MO_CROP_X_RIGHT 변수 (관심있는 도로 또는 영역)간에 제한됩니다. mo_crop_auto_on = true는 수동 설정을 무시하고 이미지 크기에 따라 거친 작물 영역을 자동 계산합니다. 모션 추적은 config.py의 mo_track_event_count 변수에 의해 제어됩니다. 이것은 트랙 이벤트 수와 트랙 길이를 픽셀로 설정합니다. 카메라보기, CPU 속도 등을 위해 조정해야 할 수도 있습니다. 속도는 L2R 및 R2L 모션 방향의 Cal_OBJ_PX_ 및 CAL_OBJ_MM_ 변수를 기반으로 계산됩니다. 변수 설정 세부 정보는 변수 IM_SUBDIR_MAX_FILES = 2000 당 미디어/이미지 (선택 사항)에 비디오 스트림 프레임 이미지가 캡처 및 저장됩니다. config.py 파일을 참조하십시오.
log_data_to_csv = true 인 경우 Speed-Cam.csv 파일이 CSV (Comma 분리 값) 형식에 저장된 이벤트 데이터로 작성/업데이트됩니다. 이는 추가 처리를 위해 스프레드 시트, 데이터베이스 등 프로그램으로 가져올 수 있습니다. 릴리스 8.9는 속도 데이터를 저장하기 위해 SQLITE3 데이터베이스를 추가합니다. 기본값은 속도 테이블에 데이터가있는 Data/Speed_Cam.db 입니다. 데이터베이스 설정은 config.py에서 관리 할 수 있습니다. 데이터베이스는 config.py 설정에서 자동으로 생성됩니다. 자세한 내용은 SQLITE3 데이터베이스를 관리하는 방법을 참조하십시오
Raspberry Pi 컴퓨터 및 RPI 카메라 모듈이 설치되었거나 USB 카메라를 연결했습니다. 하드웨어가 테스트되고 작동하는지 확인하십시오. 대부분의 RPI 모델은 정상적으로 작동합니다. 쿼드 코어 RPI는 스레딩으로 인해 성능을 크게 향상시킵니다. 최근 버전의 Raspbian 운영 체제가 권장됩니다.
또는
USB 웹 카메라가 연결된 MS Windows 또는 Unix 배포판 과 자세한 내용은 Wiki 세부 사항을 참조하십시오.
소스에서 OpenCV 3.4.2를 쉽게 컴파일하려면 OpenCV 버전 3.xx로 업그레이드하는 것이 좋습니다. https://github.com/pageauc/opencv3-setup을 참조하십시오.
Windows 또는 Unix 컴퓨터 플랫폼 (비 RPI 또는 데비안)의 경우 최신 Python 버전이 있는지 확인하십시오. Python 및 OpenCV를 다운로드하여 설치하십시오
최신 Python 버전에는이 코드를 실행하는 데 필요한 Numpy 및 최근 OpenCV 버전이 포함됩니다. 또한 USB 웹 캠이 설치되어 작업해야합니다. 이 프로그램을 설치하려면 https://github.com/pageauc/speed-camera의 github 프로젝트 페이지에 액세스하십시오 . 녹색 클론 또는 다운로드 버튼을 선택하십시오. 파일은 스피드 카메라 폴더로 복제되거나 적용됩니다. Python Idle Application (권장), GUI 데스크탑 또는 명령 프롬프트 터미널 창에서 코드를 실행할 수 있습니다. 참고 bash .sh 쉘 스크립트는 Windows에 대한 특별한 지원이 설치되지 않으면 Windows에서 작동하지 않습니다.
속도 카메라는 Docker 설치를 지원합니다
시스템 요구 사항 및 지침 별 Apple Macintosh
그리고
BIOS 가상화가 활성화 된 Microsoft Windows 10/11 64 비트 시스템 요구 사항 및 지침에 따라 Linux WSL 2 용 Microsoft Windows 서브 시스템.
config/config.py 편집하십시오RPI SSH 세션 또는 콘솔 터미널에 로그인 한 후 다음을 수행합니다. 실행하기 전에 설치 코드를 검토 할 수 있습니다
cd ~
wget https://raw.github.com/pageauc/speed-camera/master/speed-install.sh
more speed-install.sh # You can review code if you wish
chmod +x speed-install.sh
./speed-install.sh # runs install script.
cd ~/speed-camera
./speed-cam.py
Speed-Cam.py Wiki 섹션을 실행하는 방법을 참조하십시오
중요한 속도 카메라는 Calibrate_on = True 모드에서 시작됩니다.
config.py 파일의 설정을 검토하고 필요에 따라 Nano로 변수를 편집하십시오. config.py cal_obj_px_ 및 cal_obj_mm_ 의 올바른 값을 설정하려면 캘리브레이션을 수행해야합니다. 변수는 카메라에서 속도를 위해 측정되는 물체까지의 거리를 기준으로합니다. 자세한 내용은 교정 절차를 참조하십시오.
track_counter =라는 config.py 모션 추적 변수 시스템 및 OpenCV 버전에 대해 조정할 수 있습니다. 기본값은 5이지만 쿼드 코어 RPI3 및 최신 OpenCV 버전은 10-15 이상일 수 있습니다. 미세 조정하려면 장방 로그 메시지를 모니터링해야합니다.
cd ~/speed-camera
./menubox.sh
Menubox.sh를 사용하는 관리자 속도 캠 (교정 및/또는 테스트 완료) 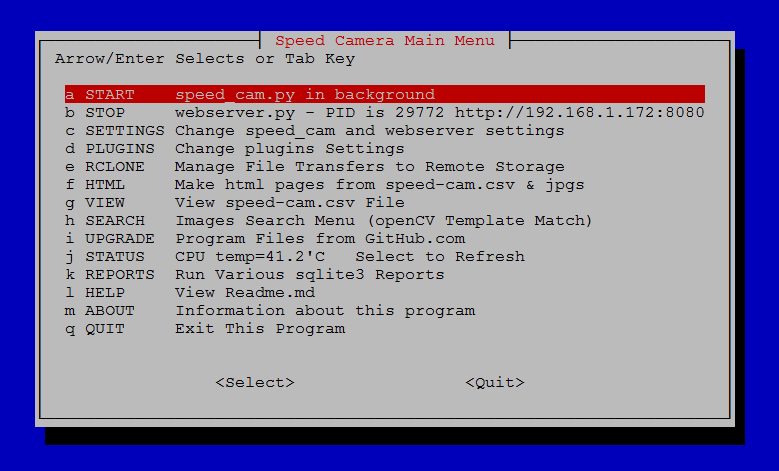
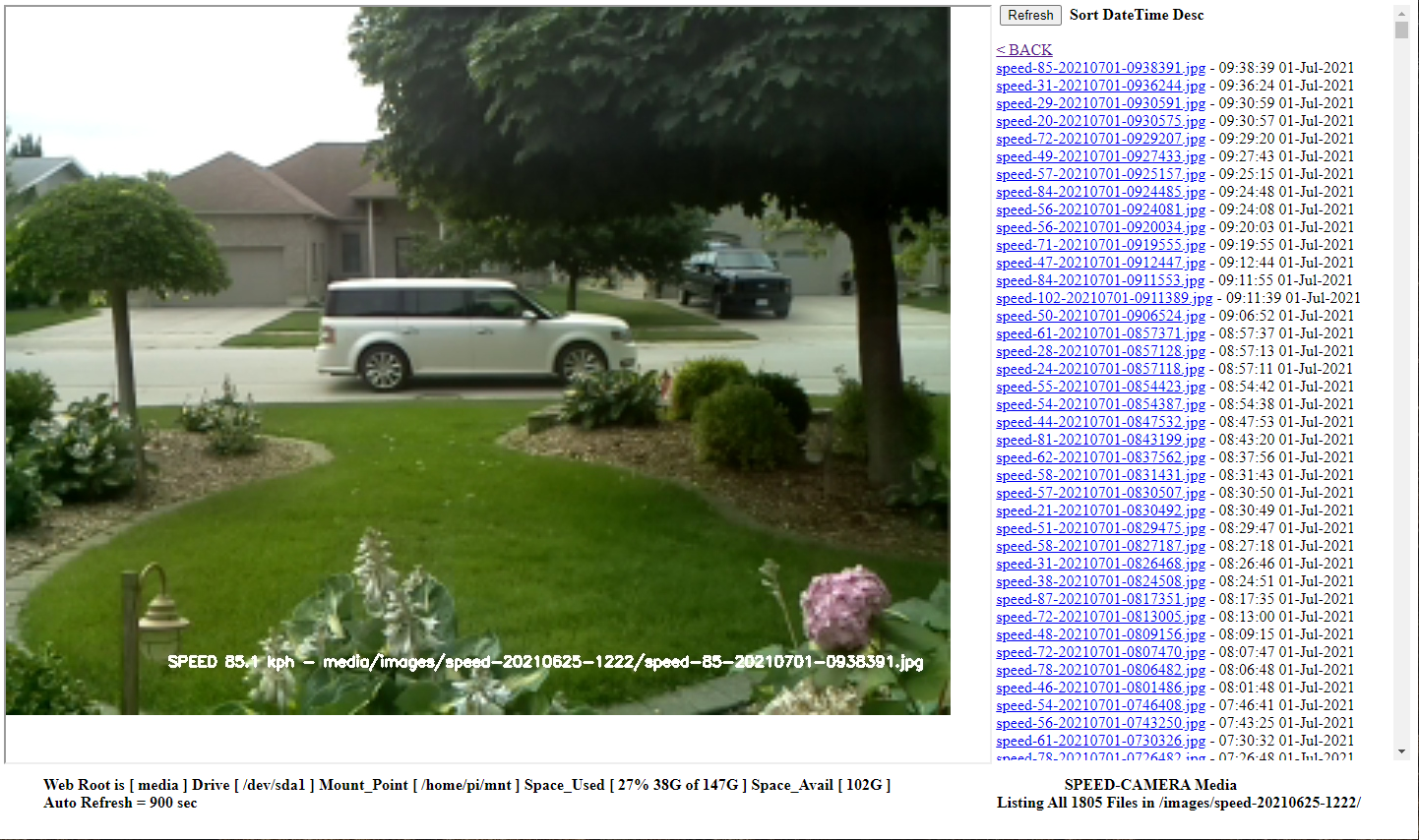
샘플 화면 샷 당 웹 브라우저에서 속도 캠 데이터 및 트렌드를 봅니다. Menubox.sh 메뉴 선택 또는 콘솔에서 또는 Crontab Schedule을 통해 스크립트를 실행하여 생성 할 수 있습니다.
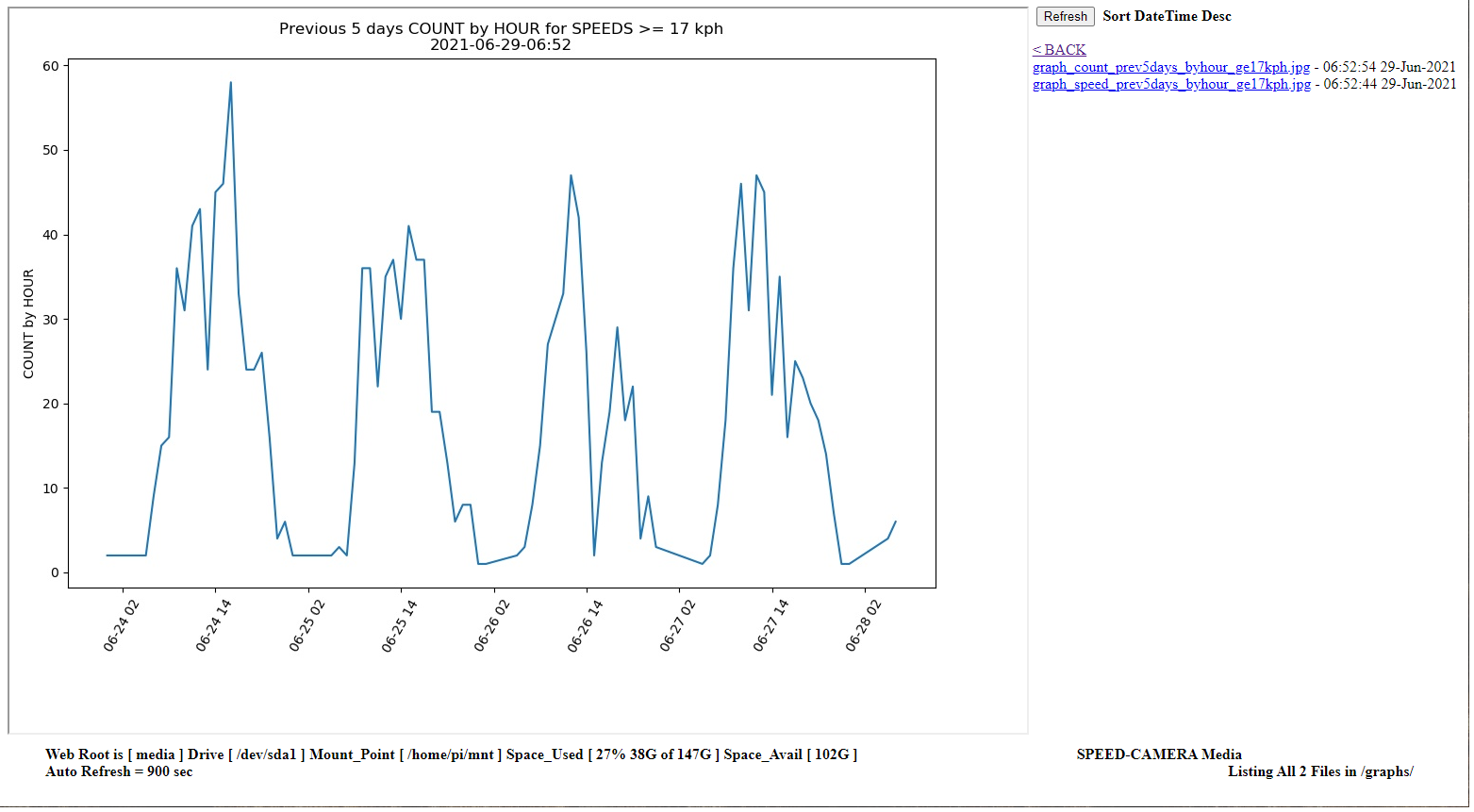
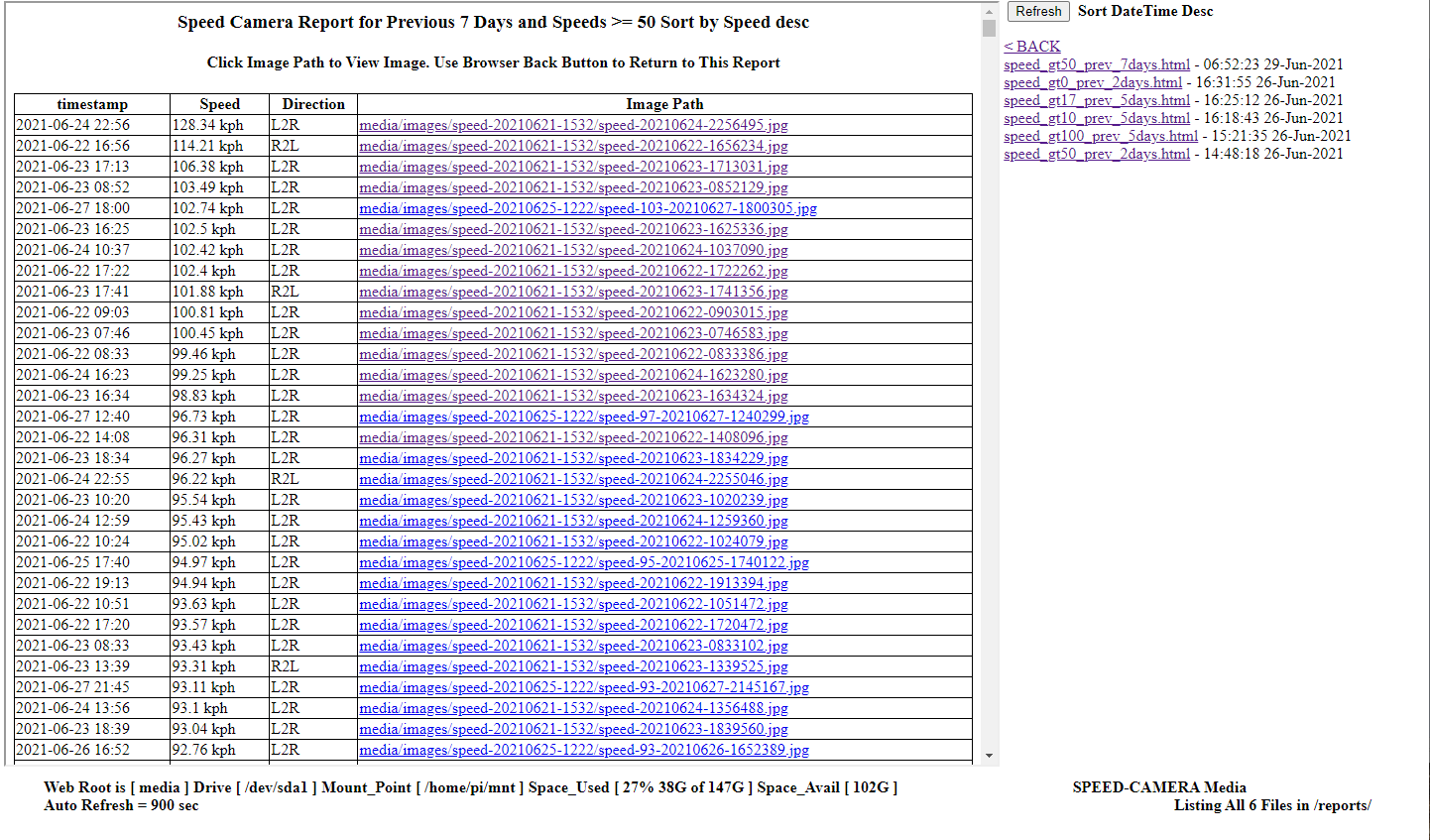

Speed Web Browser 페이지에서 최근 또는 과거 이미지를 직접 볼 수 있습니다. 이들은 동적으로 만들어지고 최신 이미지를 나타냅니다. 웹 페이지 새로 고침 버튼을 눌러 디스플레이를 업데이트합니다 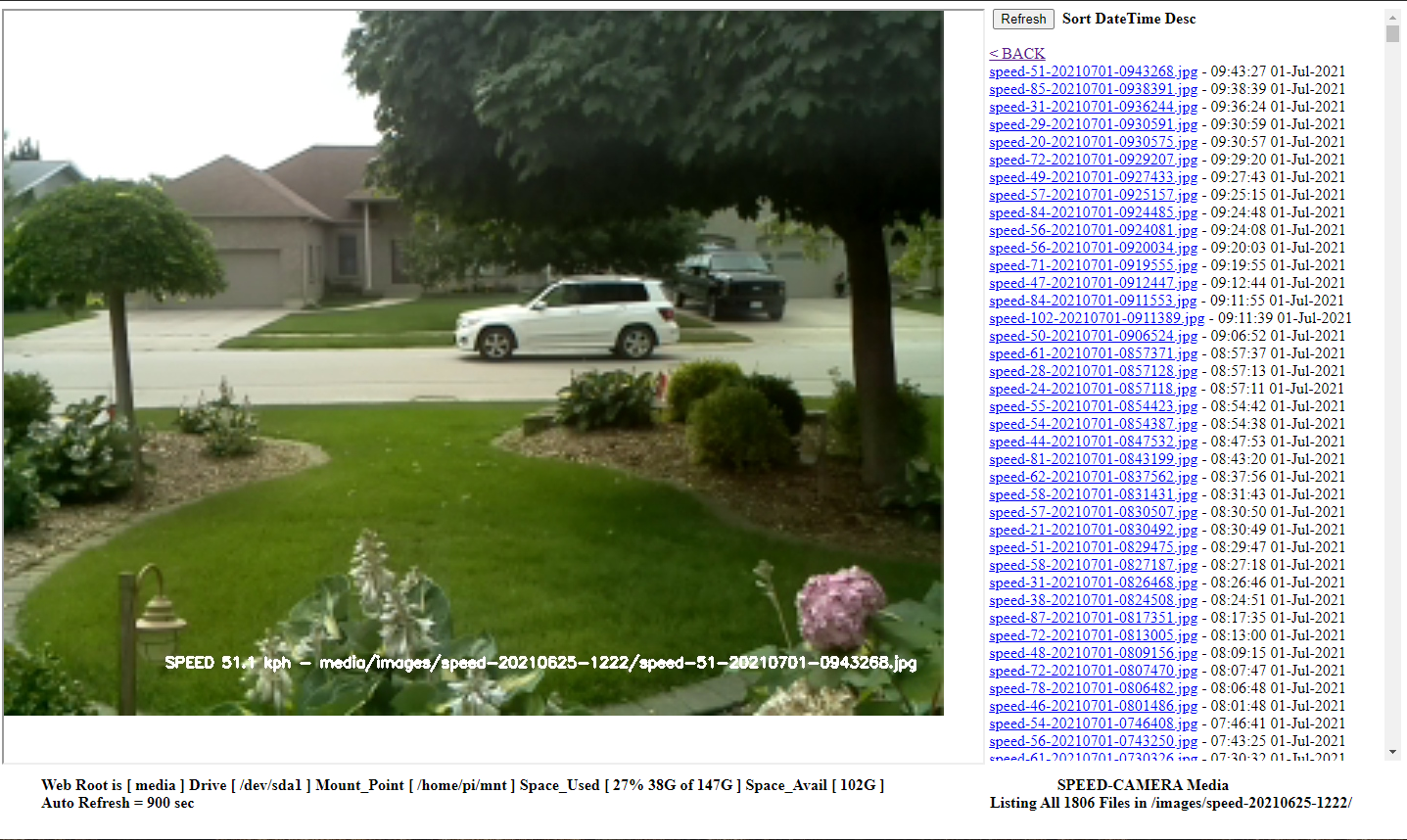
이 코드 중 일부는 C를 사용하는 Kyle Hounslow의 YouTube 튜토리얼을 기반으로합니다.
https://www.pyimagesearch.com (https://github.com/jrosebr1/imutils/blob/master/master/master/imutils/video/pivideostream.py)에 대한 http://www.pyimagesearch.com의 Adrian Rosebrock Jrosebr1에게 감사드립니다.
재미있어
Claude Pageau
YouTube 채널 https://www.youtube.com/user/pageaucp
github repo https://github.com/pageauc


