fast_gicp
1.0.0
我們發布了Small_GICP,其速度是FAST_GICP的兩倍,並且具有最低依賴性和清潔界面。
該軟件包是基於GICP的快速點雲註冊算法的集合。它構成了我們的Voxelized GICP(VGICP)算法的多線程GICP以及多線程和GPU實現。所有實施的算法都具有PCL註冊接口,因此可以用作PCL中GICP的Inploph替換。
我們已經在Ubuntu 18.04/20.04和Cuda 11.1上測試了此軟件包。
在MacOS上使用brew時,您可能必須設置這樣的依據
cmake .. "-DCMAKE_PREFIX_PATH=$(brew --prefix libomp)[;other-custom-prefixes]" -DQt5_DIR=$(brew --prefix qt@5)lib/cmake/Qt5
要啟用CUDA驅動的實現,請將BUILD_VGICP_CUDA cmake選項設置為ON 。
cd ~ /catkin_ws/src
git clone https://github.com/SMRT-AIST/fast_gicp --recursive
cd .. && catkin_make -DCMAKE_BUILD_TYPE=Release
# enable cuda-based implementations
# cd .. && catkin_make -DCMAKE_BUILD_TYPE=Release -DBUILD_VGICP_CUDA=ONgit clone https://github.com/SMRT-AIST/fast_gicp --recursive
mkdir fast_gicp/build && cd fast_gicp/build
cmake .. -DCMAKE_BUILD_TYPE=Release
# enable cuda-based implementations
# cmake .. -DCMAKE_BUILD_TYPE=Release -DBUILD_VGICP_CUDA=ON
make -j8 cd fast_gicp
python3 setup.py install --user注意:如果您在啟用Catkin的環境上並且安裝不正常,請在cmakelists.txt中註釋find_package(catkin) ,然後再次運行上述安裝命令。
import pygicp
target = # Nx3 numpy array
source = # Mx3 numpy array
# 1. function interface
matrix = pygicp . align_points ( target , source )
# optional arguments
# initial_guess : Initial guess of the relative pose (4x4 matrix)
# method : GICP, VGICP, VGICP_CUDA, or NDT_CUDA
# downsample_resolution : Downsampling resolution (used only if positive)
# k_correspondences : Number of points used for covariance estimation
# max_correspondence_distance : Maximum distance for corresponding point search
# voxel_resolution : Resolution of voxel-based algorithms
# neighbor_search_method : DIRECT1, DIRECT7, DIRECT27, or DIRECT_RADIUS
# neighbor_search_radius : Neighbor voxel search radius (for GPU-based methods)
# num_threads : Number of threads
# 2. class interface
# you may want to downsample the input clouds before registration
target = pygicp . downsample ( target , 0.25 )
source = pygicp . downsample ( source , 0.25 )
# pygicp.FastGICP has more or less the same interfaces as the C++ version
gicp = pygicp . FastGICP ()
gicp . set_input_target ( target )
gicp . set_input_source ( source )
matrix = gicp . align ()
# optional
gicp . set_num_threads ( 4 )
gicp . set_max_correspondence_distance ( 1.0 )
gicp . get_final_transformation ()
gicp . get_final_hessian ()CPU:Core i9-9900K GPU:GEFORCE RTX2080TI
roscd fast_gicp/data
rosrun fast_gicp gicp_align 251370668.pcd 251371071.pcd target:17249[pts] source:17518[pts]
--- pcl_gicp ---
single:127.508[msec] 100times:12549.4[msec] fitness_score:0.204892
--- pcl_ndt ---
single:53.5904[msec] 100times:5467.16[msec] fitness_score:0.229616
--- fgicp_st ---
single:111.324[msec] 100times:10662.7[msec] 100times_reuse:6794.59[msec] fitness_score:0.204379
--- fgicp_mt ---
single:20.1602[msec] 100times:1585[msec] 100times_reuse:1017.74[msec] fitness_score:0.204412
--- vgicp_st ---
single:112.001[msec] 100times:7959.9[msec] 100times_reuse:4408.22[msec] fitness_score:0.204067
--- vgicp_mt ---
single:18.1106[msec] 100times:1381[msec] 100times_reuse:806.53[msec] fitness_score:0.204067
--- vgicp_cuda (parallel_kdtree) ---
single:15.9587[msec] 100times:1451.85[msec] 100times_reuse:695.48[msec] fitness_score:0.204061
--- vgicp_cuda (gpu_bruteforce) ---
single:53.9113[msec] 100times:3463.5[msec] 100times_reuse:1703.41[msec] fitness_score:0.204049
--- vgicp_cuda (gpu_rbf_kernel) ---
single:5.91508[msec] 100times:590.725[msec] 100times_reuse:226.787[msec] fitness_score:0.20557
有關詳細用法,請參見src/align.cpp。
# Perform frame-by-frame registration
rosrun fast_gicp gicp_kitti /your/kitti/path/sequences/00/velodyne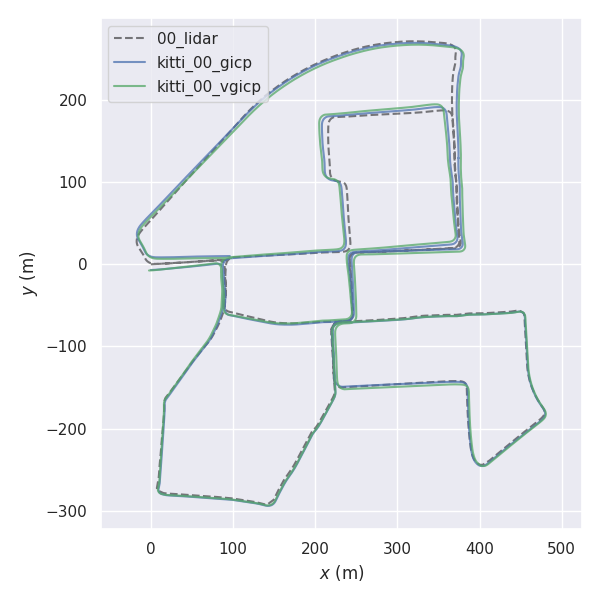
cd fast_gicp/src
python3 kitti.py /your/kitti/path/sequences/00/velodyne在某些環境中,設置較少的線程數而不是(默認)最大線程數可能會導致處理速度更快(請參見#145(註釋))。
Kenji Koide,[email protected]
日本國家先進工業科學技術研究所以人為本的流動性研究中心[url]


