epc9151 power bidirectional acmc
1.0.1

Bidirektionaler 2-Phasen-Synchron-/Boost-Konverter
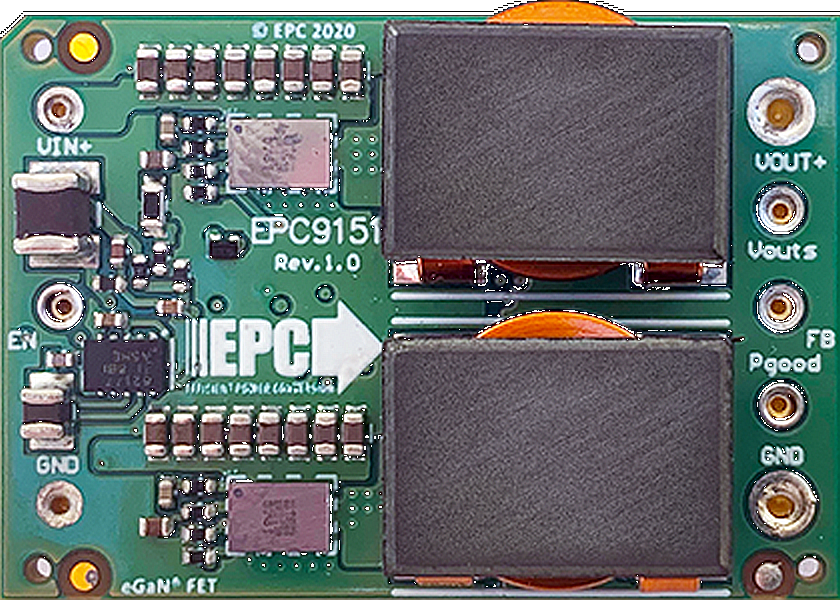 | 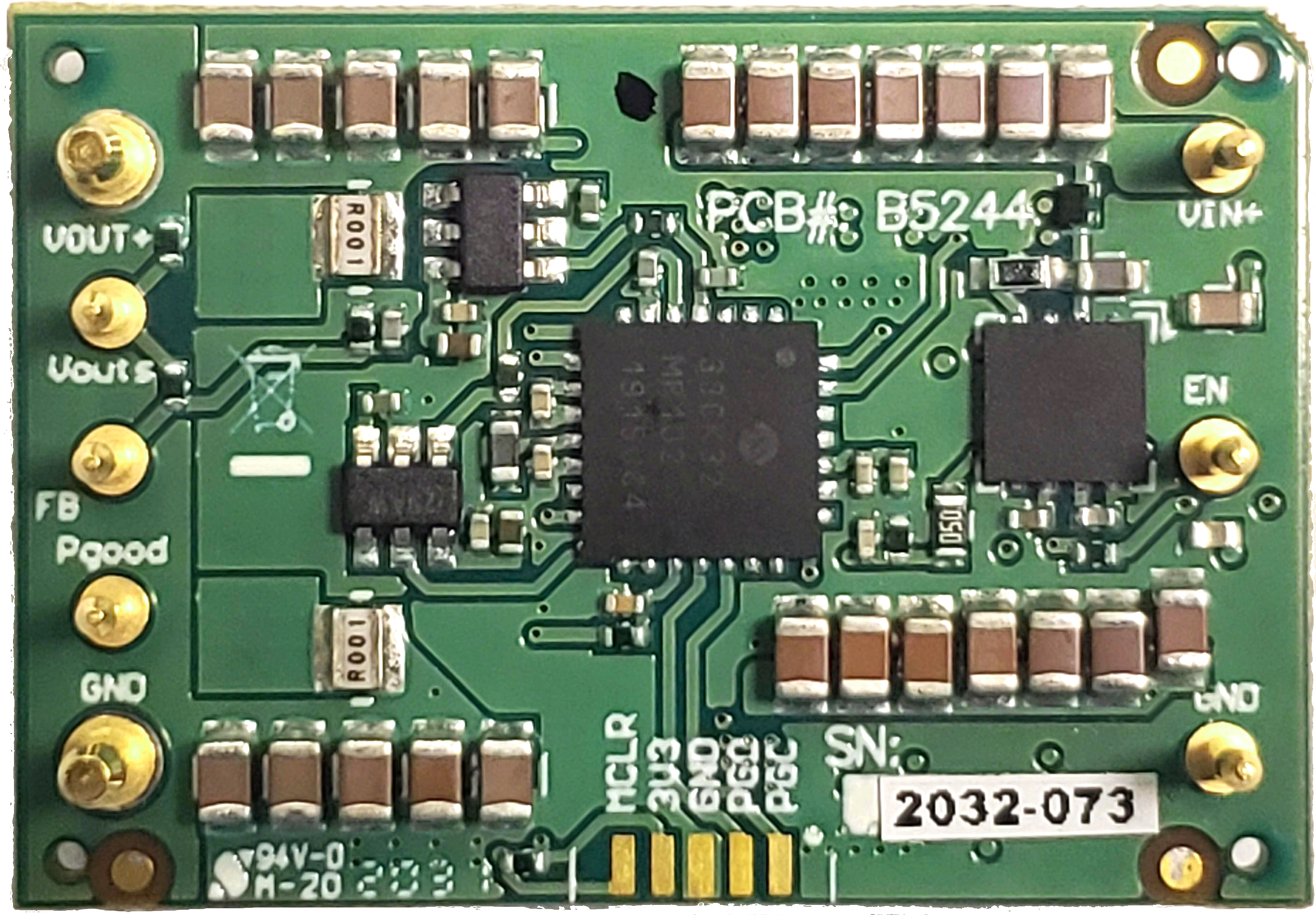 | |||
| Spitzenansicht | Bodenansicht |
In diesem Codebeispiel zeigt eine durchschnittliche Implementierung der Closed Loop Current Modus Control für DSPIC33CK. Es wurde speziell für den EPC9151 Rev1.0 1/16 Brick Converter entwickelt.
Das Board unterstützt den Streifen sowie den Stoffbetrieb. Im Step-Down-Modus verläuft die Konvertierungsrichtung von 48 V bis 12 V, während im Auftaktmodus die Konvertierungsrichtung von 12 V auf 48 V. Wenn nicht andere angegeben ist, wird die 48-V-Seite als "Eingabe" bezeichnet und die 12-V-Seite wird in diesem Dokument als "Ausgabe" bezeichnet.
Die Platine startet den Leistungswandler automatisch, wenn Strom auf die Karte angewendet wird, wodurch eine regulierte Ausgangsspannung bereitgestellt wird. Das Startvorgang wird vom Power Controller-Statusgerät gesteuert und ausgeführt und enthält ein konfigurierbares Startverfahren mit Ausschalten, Startdauer und Stromverzögerung, bevor sie in den konstanten Regulierungsmodus fallen. Eine zusätzliche Routine für Fehlerhandler überwacht kontinuierlich eingehende ADC -Daten und periphere Status -Bits und schaltet die Stromversorgung ab, wenn die Eingangsspannung außerhalb des definierten Bereichs (UVLO/ovlo) liegt oder wenn die Ausgangsspannung mehr als 10 Millisekunden mehr als 0,5 V aus der Regulierung liegt.
Mit einem durchschnittlichen Moden-Controller vom durchschnittlichen Modus von Mutli-Schleifen werden Phasenströme in beiden Phasen dieses verschachtelten Konverters ausgleichen. (Siehe Details unten)
Ausgewählte Microchip -Technologieprodukte:
Ausgestellte EPC -Produkte (effiziente Stromumrechnungen):
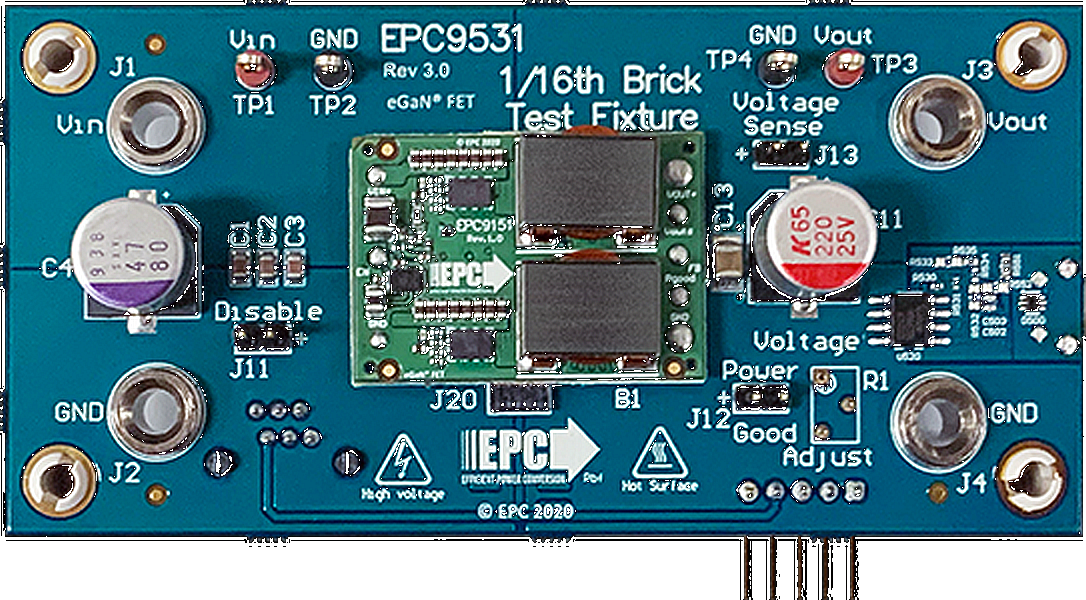
Das EPC9151 1/16. Brick Power Modul wird am besten getestet, wenn sie an die EPC9531 -Testanlage angeschlossen sind. Diese Testanlage bietet auch alle erforderlichen Schnittstellen zum Programmieren und Debuggen des DSPIC33CK32MP102 DSC sowie den Testpunkten und Bananen -Jackanschlüssen für die einfache und sichere Behandlung des Kits während der Banktests. Das EPC9531 QSG enthält detaillierte Anweisungen für Betriebsverfahren.
Das Board ist programmiert und bereit, beim Auspacken verwendet zu werden. Zum Betrieb der Platine ist keine Neuprogrammierung des Zielgeräts erforderlich, es sei denn, Funktionen oder Einstellungen wie die nominale Ausgangsspannung oder das Startzeitpunkt müssen geändert werden.
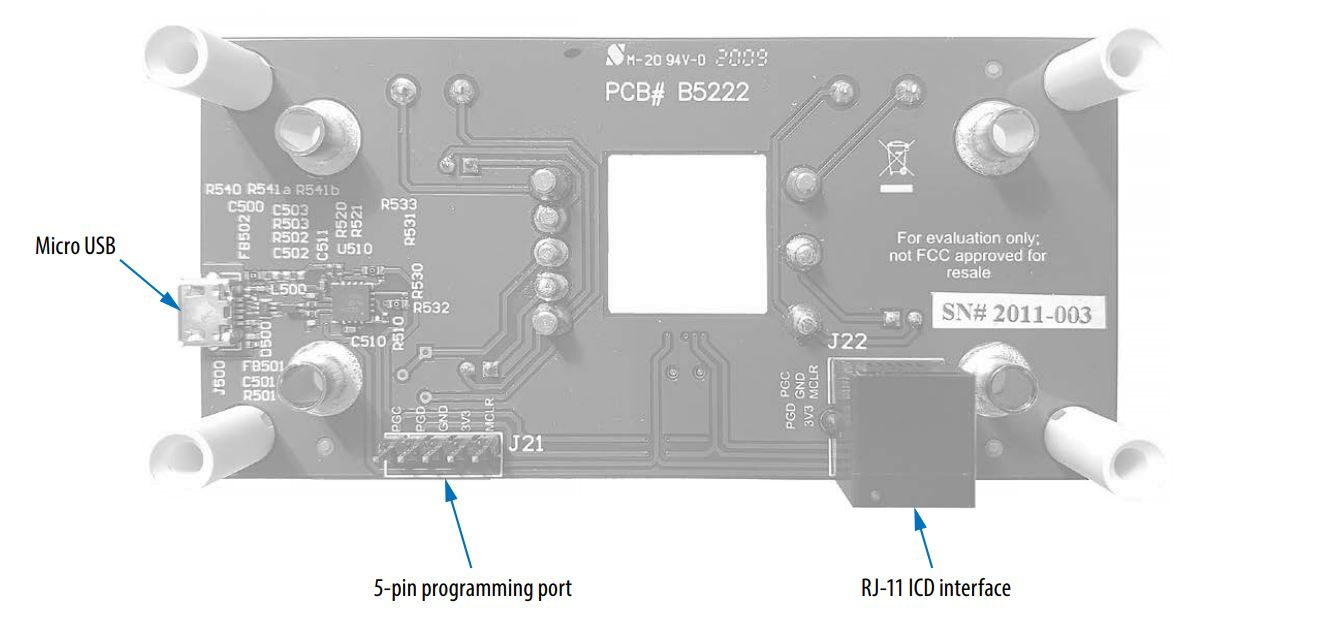
In Fall, dass firmwarebasierte Funktionen geändert werden müssen, kann der Microchip DSPIC33CK-Controller mit dem in der RJ-11-Programmierschnittstelle verfügbaren seriellen Programmieranschluss (ICSP) sowie des 5-Pin-Headers, der vom EPC9531-Test-Fixierpunkt bereitgestellt wird, neu programmiert werden. Diese Schnittstellen unterstützen alle In-Cirtu-Programmierer/Debugger von Microchip wie MPLAB® ICD4, MPLAB® Real Ice oder MPLAB® PICKIT4 und frühere Derivate. Weitere Informationen finden Sie unter EPC9531 Quick Start Guide.
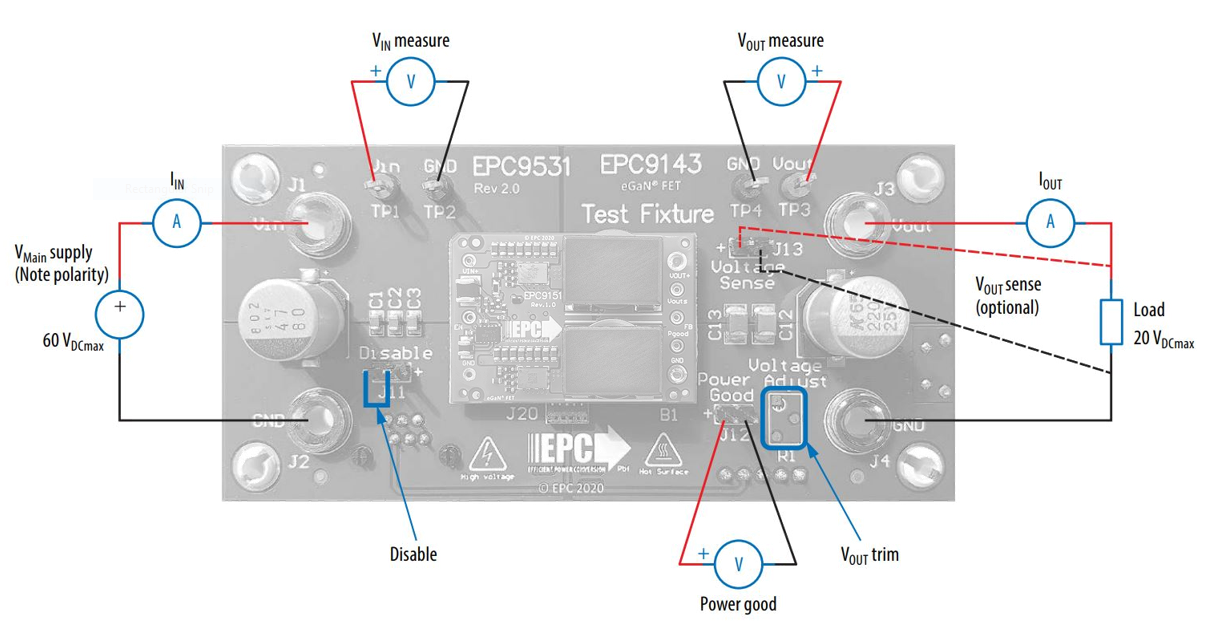
Der Konverter startet automatisch, wenn mehr als 8,5 V DC über die Ausgangsklemmen angewendet werden. 18 V über die Eingangsanschlüsse des EPC9531 -Testspiels. Es wird nicht empfohlen, das EPC9151 -Referenzdesign ohne ordnungsgemäße Entkopplungskapazität entweder bei Eingang oder Ausgabe zu betreiben. Das EPC9531 -Testspiel bietet die beste Testumgebung für den Konverter. Bitte lesen Sie den EPC9531 Quick Start Guide, um detaillierte Informationen zu den Anforderungen für die Einrichtung und den Betrieb dieses Referenzdesigns zu erhalten.
Die Staatsmaschine durchläuft die folgenden Schritte in chronologischer Reihenfolge:
a) Initialisierung
In diesem Schritt werden die Kontrollschleifparameter auf ihre Standardeinstellungen zurückgesetzt, PWM -Ausgänge werden ausgeschaltet, aber die PWM läuft immer noch und löst den ADC kontinuierlich aus, um die Abtasteingangs- und Ausgangsspannung sowie die Boardtemperatur aufrechtzuerhalten.
b) Zurücksetzen Dies ist der Status "Fall-Back", aus dem der Buck-Konverter nach dem erfolgreichen Start des Buck-Wandlers neu gestartet wird und aufgrund eines Fehlerbedingungen (z.
c) Standby nach dem Zurücksetzen wartet die Statusmaschine darauf, dass alle Fehlerflags gelöscht werden und die Aktivitäten und Go -Bits eingestellt werden.
D) Stick-on-Verzögerung (POD) Sobald der Buck-Wandler gelöscht wurde, wird der Statusautomaten die Startvorgangsvorgang ausführen. Dies ist nur eine einfache Verzögerung, in der der Konverter inaktiv bleibt, aber der Fehlerhandler beobachtet die vom ADC erzeugten Werte für auftretende Fehlerbedingungen.
e) Startspannungsrampe Nach Ablauf der Steckdosenverzögerung werden die Eingangs- und Ausgangsspannung gemessen. Falls der Konverterausgang vorgespannt ist (Spannung = ungleich Null), wird der Leistungssteuerer mit einer künstlichen Steuerhistorie und einer PWM-Ausgabe „vorgeladen“, um die Ausgangsspannung von seinem jüngsten Niveau sanft zu stöbern.
f) Spannungsverstärker jetzt sind die digitalen Rückkopplungsschleife und PWM aktiviert und der Referenzwert des geschlossenen Schleifensystems wird mit jeder Ausführung der Zustandsmaschine (100 µSEC-Intervall) erhöht. Die Kontrollschleife wurde eingestellt, um mit einer Kreuzungsfrequenz von> 10 kHz mit der maximalen Störungsfrequenz übereinstimmen zu können, um das Steuerungssystem stabil zu halten.
g) Stromverzögerung Nachdem die Referenzspannung auf die vordefinierte Nennebene erhöht wurde, wechselt der Statusmaschinen-Machine in die Leistungsverzögerungsfrist. Dies ist eine weitere, einfache Verzögerung, bei der sich die Kontrollschleife in stabilem Zustand befindet, die darauf warten, dass die Verzögerungsfrist abläuft.
h) Online nach Ablauf der Leistung der Leistung fällt der Konverter in den nominellen Betrieb. In diesem Zustand beobachtet es kontinuierlich den Referenzwert für Änderungen. Sollte ein anderer Teil der Firmware die Controller-Referenz ändern, schaltet sich die Statusmaschine sanft in die neue Ebene ein, anstatt die Referenz zu schalten.
i) Suspend/Fehler Wenn der Leistungscontroller durch externe Befehle heruntergefahren und zurückgesetzt wird (z. B. Fehlerhandler, die eine Fehlerbedingung oder durch Benutzerverzögerung erkennen), wechselt die Statusmaschine in den Suspend-Status, der die PWM-Ausgänge deaktiviert und die Ausführung der Steuerungsschleife zurücksetzt und die staatlichen Maschinen zurücksetzen, um das State-Maschinen zurückzutragen, um das State-Maschinen zu reset, um das Reservieren zu reseten, um das Reservieren zu reset, um das State-Maschinen zu reagieren, um das Referet zu reseten, um das State-Maschinen zu reseten, um das Reservet zu reservieren.
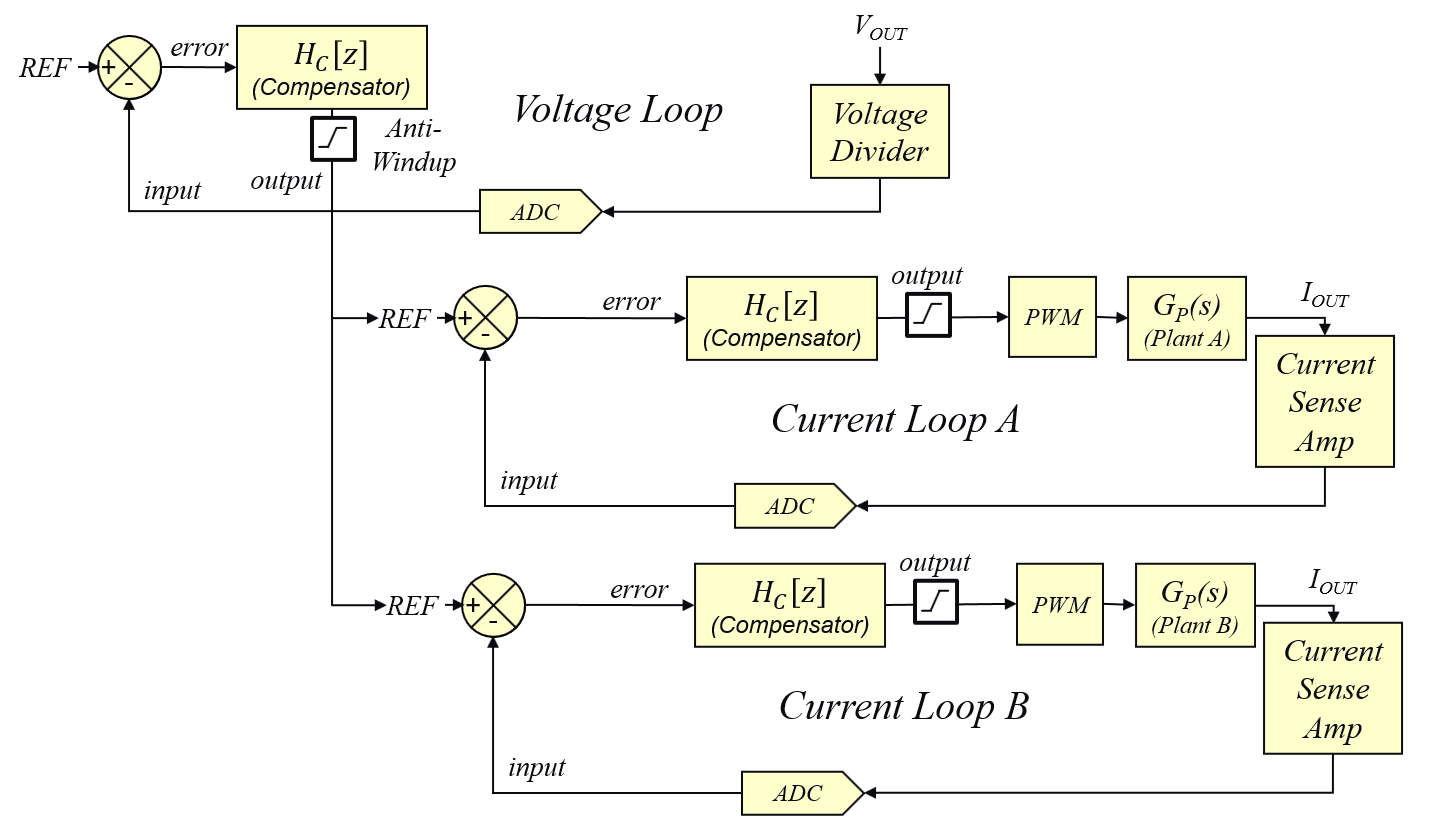
Das bidirektionale Kontrollsystem von EPC9151 basiert auf der konventionellen Durchschnittsstrom-Modussteuerung (ACMC). Eine äußere Spannungsschleife reguliert die Ausgangsspannung, indem der neueste Rückkopplungswert mit einer internen Referenz verglichen wird. Die Abweichung wird durch einen diskreten Kompensationsfilter vom Typ II (2P2Z) verarbeitet. Die Ausgabe der Spannungsschleife legt die Referenz für die beiden inneren Stromschleifen fest. Jeder Phasenstrom -Controller verarbeitet die Abweichung zwischen der angegebenen dynamischen Stromreferenz und dem individuellen aktuellen aktuellen Feedback. Jede Stromsteuerschleife -Ausgangsausgabe passt den individuellen Arbeitszyklus oder die individuelle Phase an, was zu streng ausgewogenen Phasenströmen führt. Dieses Kontrollschema wird sowohl auf 48 V bis 12 V nachgelagertes Buck als auch auf 12 V bis 48 V vorgelagert angewendet.
Wenn die Ausgangsspannung von einer einzelnen DC -Quelle von beiden Seiten des Wandlers angetrieben wird, wird die Ausgangsspannung bis zum maximalen Ausgangsstrom von 25 a ck konstant gehalten. 5.5 A im Boost -Betrieb, in welcher Stufe der Wandler in den konstanten Strommodus umschaltet, deaktiviert die Spannungsregelung effektiv.
Diese Firmware dient als grundlegender Baustein von Batterie-Ladegerät-Front-End-Systemen durch die Implementierung eines chemischspezifischen Ladeprofils oder als Ausgleichskonverter zwischen zwei batteriebetriebenen Busschienen.
Diese Kontrollschleife kann durch Verwendung des Bits aktivieren im Statuswort der CNPNZ_T -Controller -Datenstruktur eingeschaltet werden. Die adaptive Schleifengewinnmodulation ist dauerhaft aktiv, sobald die Steuerschleife aktiviert ist.
Der Quellcode für Steuerschleifen wird von der Software PowerSmart ™ - Digital Control Library Designer (DCLD) konfiguriert und generiert.
Diese zusätzliche Designsoftware kann auf Github -Seiten heruntergeladen werden:
Nach der Installation kann die Controller -Konfiguration geändert werden. Die neueste Konfiguration kann innerhalb der MPLAB X® IDE geöffnet werden, indem Sie mit der rechten Maustaste auf die Datei 'DPSK3_VMC.DCLD' im Ordner "DPSK3_VMC.DCLD" des Projekts des Projektmanagers klicken. Wählen Sie bei der rechten Maustaste "Öffnen im System", um die Konfiguration in PowersMart ™ DCLD zu öffnen.
Weitere Informationen finden Sie in der Benutzerhandbuch von PowersMart ™ DCLD, die in der Software enthalten ist und aus dem Help -Menü der Anwendung geöffnet werden kann.
Der Firmware wurde keine Benutzerkontrollschnittstelle hinzugefügt. Jede Änderung der Firmware und des grundlegenden Betriebs des Referenzdesigns, einschließlich der Neuprogrammierung der nominalen Ausgangsspannung
Die Konvertereinstellungen in dieser Datei werden als physikalische Werte wie Volt, Ampere, Ohm usw. definiert. Jeder definierte Wert wird zum Kompilierzeit in Binärzahlen durch sogenannte Makros konvertiert. Daher müssen Benutzer Werte nicht manuell konvertieren.
Um den Konverter zu programmieren, um eine nominale Ausgangsspannung zu liefern, die standardmäßig von 12 V DC eingestellt ist, befolgen Sie die folgenden Schritte:
Die Einstellung für die nominale Ausgangsspannung findet sich in den Zeilen Nr. 324 bis 326.
#define BUCK_VOUT_NOMINAL (float)12.000 // Nominal output voltage
#define BUCK_VOUT_TOLERANCE_MAX (float)0.500 // Output voltage tolerance [+/-]
#define BUCK_VOUT_TOLERANCE_MIN (float)0.100 // Output voltage tolerance [+/-]
Die obigen Toleranzeinstellungen enthalten die transiente Antwort bei einem maximalen Lastschritt. Der Wert für die maximale Ausgangsspannungstoleranz 'Buck_vout_tolerance_max' wird vom Fehlerhandler beobachtet. Sollte der Ausgangsspannungswert von dem jüngsten Referenzspannungswert um mehr als den angegebenen Bereich abgeleitet wird, wird der Konverter heruntergefahren und ein Regulierungsfehler wird angezeigt. Die Stromversorgung wird automatisch wiederhergestellt, sobald die Fehlerbedingung gelöscht wurde und der von BUCK_REGERR_RECOVERY_DELAY in Zeile Nr. 527 der EPC9151 -Hardware -Beschreibung der Hardware -Beschreibung der Hardware -Header -Datei abgelaufene.
(Die angegebenen Zeilennummern können sich ändern.)
Diese Code -Beispiele umfassen eine alternative proportionale Kontrollschleife, die häufig während der Messungen des Frequenzgangs des Kraftwerks verwendet wird. Wenn die folgende Definition auf TRUE eingestellt ist, wird die gemeinsame Hauptsteuerschleife durch den Proportional Controller ersetzt.
app_power_control.c, line 33: #define PLANT_MEASUREMENT false
Proportionale Controller sind standardmäßig instabil und sind nicht geeignet, die Ausgabe einer Stromversorgung unter normalen Betriebsbedingungen zu regulieren. Während einer Anlagenmessung ist es obligatorisch, dass die Eingangsspannung und -belastung stabil bleiben und sich nicht ändern.
Weitere Informationen zur Durchführung einer Kraftwerksmessung finden Sie in den Abschnitten im DCLD -Benutzerhandbuch für PowersMart ™.
(c) 2020, Microchip Technology Inc.


