epc9151 power bidirectional acmc
1.0.1

Convertisseur synchrone / boost synchrone bidirectionnel en 2 phases
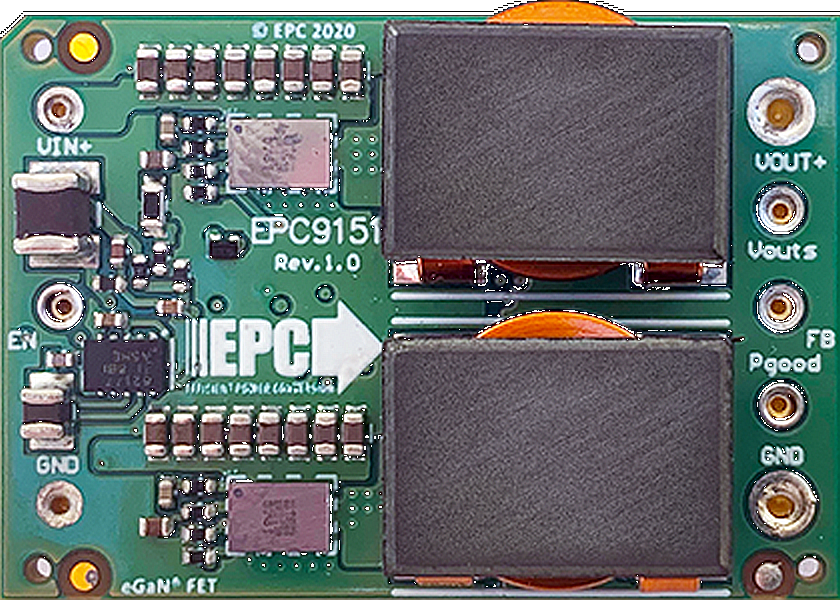 | 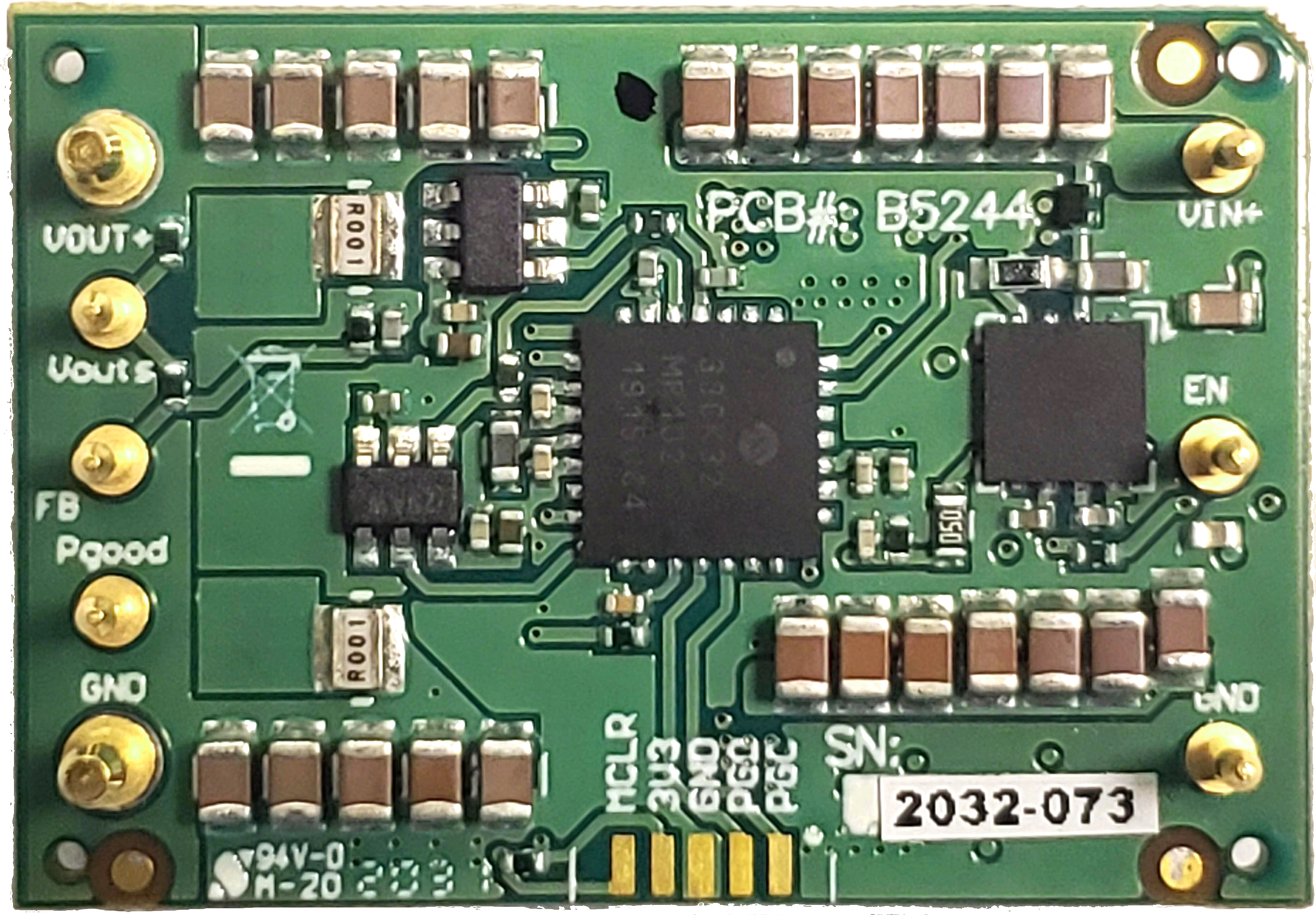 | |||
| Vue de haut niveau | Vue du bas |
Cet exemple de code démontre une implémentation de contrôle de mode de courant moyen en boucle fermée pour DSPIC33CK. Il a été spécifiquement développé pour le convertisseur en brique EPC9151 Rev1.0 1/16.
Le conseil d'administration prend en charge les opérations de mise en bas ainsi que la mise en œuvre. En mode interrompu, la direction de conversion passe de 48 V à 12 V tandis qu'en mode de pas-up, la direction de conversion de 12 V à 48 V. Si ce n'est pas autrement indiqué, le côté 48 V est nommé «entrée» et le côté 12 V est nommé «sortie» dans ce document.
La carte démarre automatiquement le convertisseur d'alimentation lorsque l'alimentation est appliquée à la carte, fournissant une tension de sortie réglementée. La procédure de démarrage est contrôlée et exécutée par la machine d'état du contrôleur d'alimentation et comprend une procédure de démarrage configurable avec un retard de mise sous tension, une période de renforcement et un bon retard avant de passer en mode de régulation constante. Une routine de gestionnaire de défauts supplémentaire surveille en continu les données ADC entrantes et les bits d'état périphérique et arrête l'alimentation d'alimentation si la tension d'entrée est en dehors de la plage définie (UVLO / OVLO) ou si la tension de sortie est supérieure à 0,5 V sans réglementation pendant plus de 10 millisecondes.
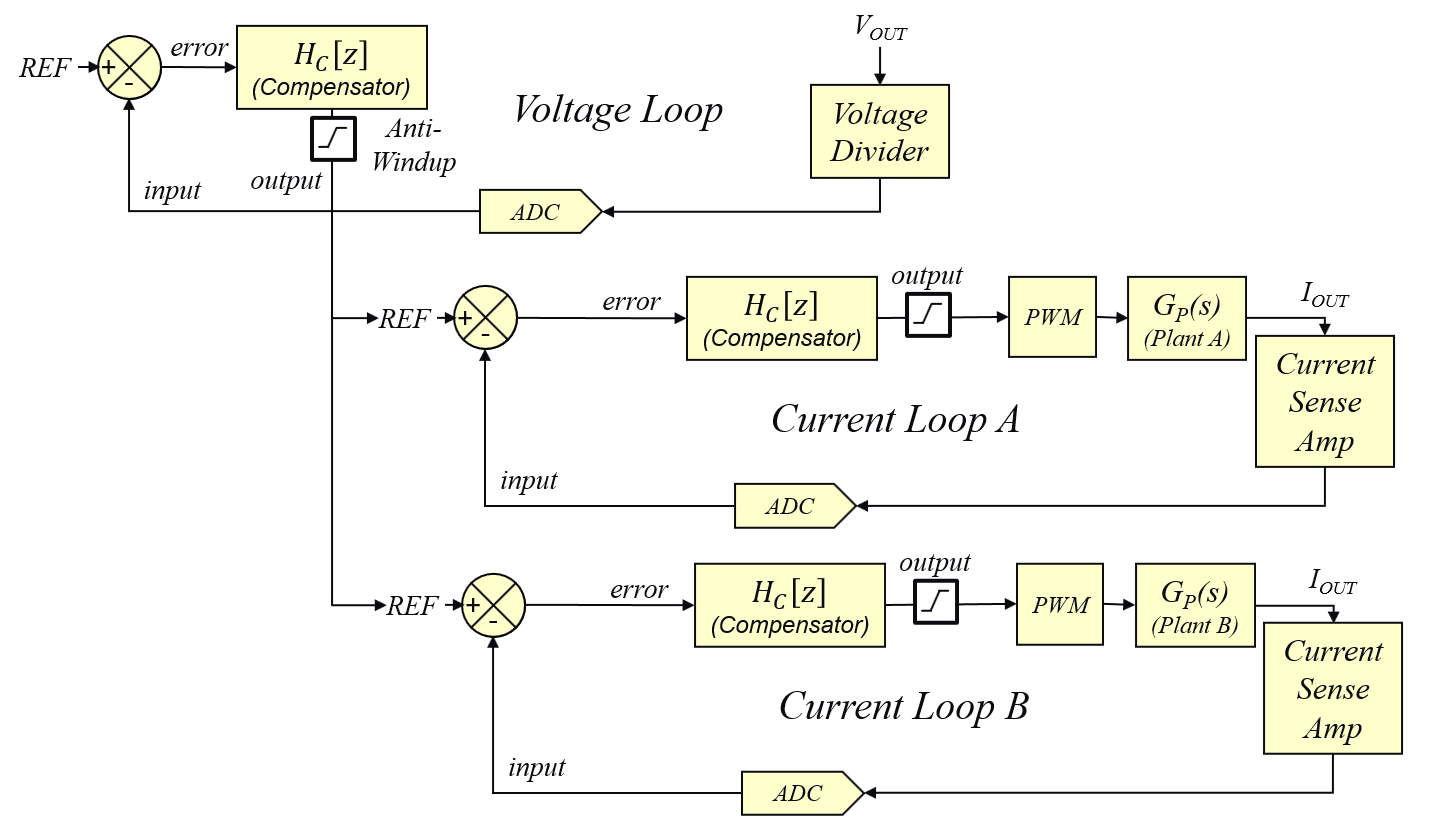
Un contrôleur de mode moyen de type Mutli-boucle (2p2z) est utilisé pour équilibrer les courants de phase dans les deux phases de ce convertisseur entrelacé. (voir les détails ci-dessous)
Produits technologiques Microchip en vedette:
Produits de conversion de puissance efficace (EPC):
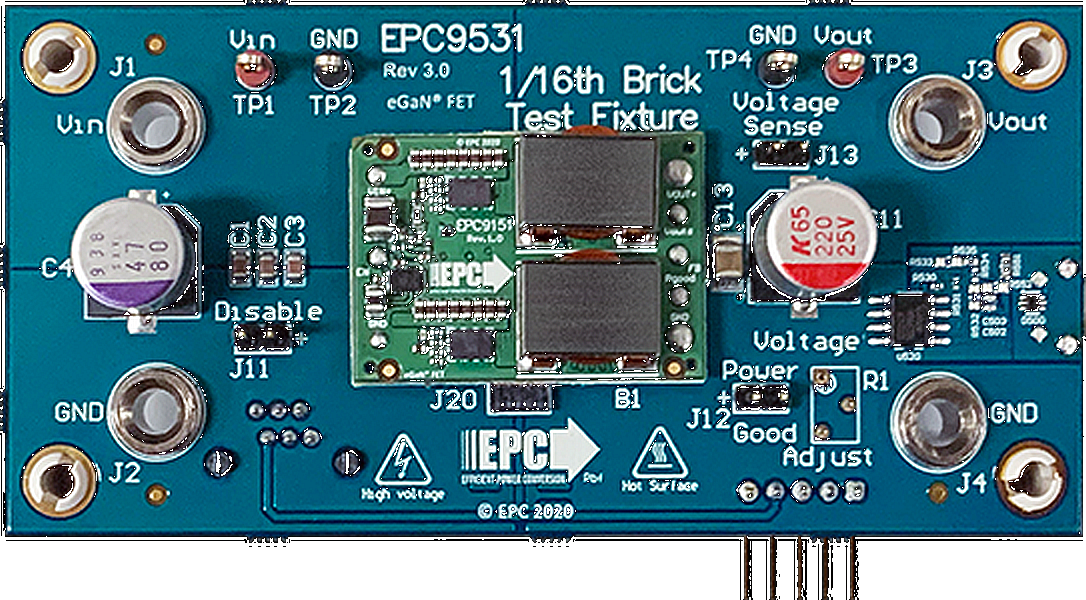
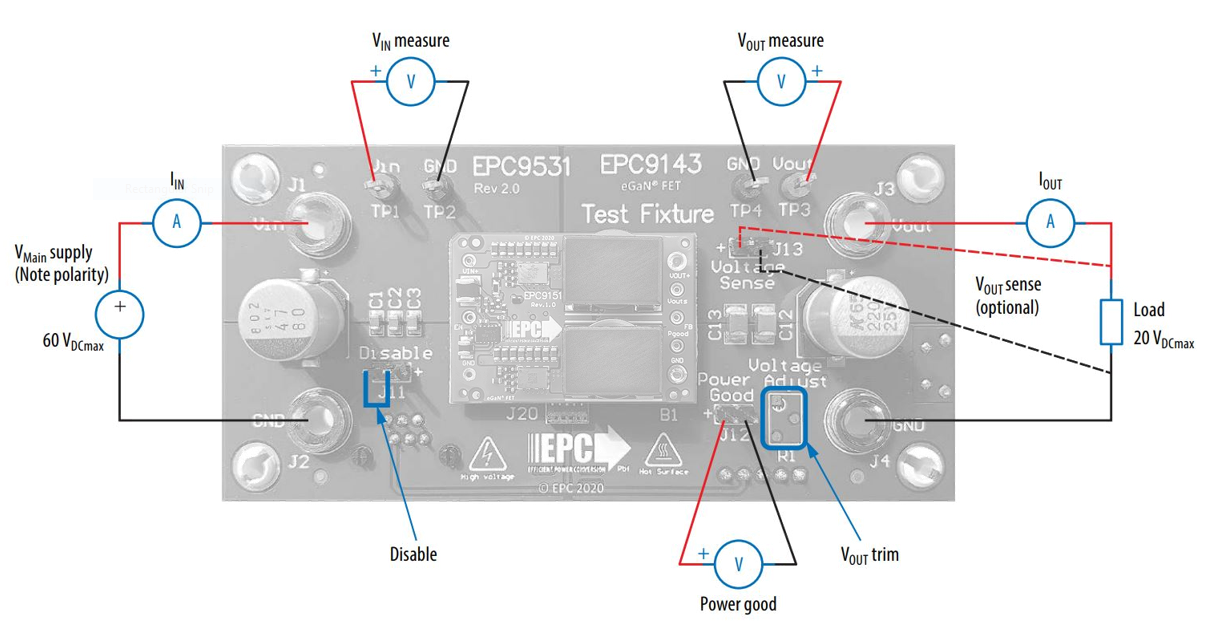
Le module d'alimentation en brique EPC9151 1/16th est mieux testé lorsqu'il est branché sur le luminaire de test EPC9531. Ce luminaire de test fournit également toutes les interfaces requises pour programmer et déboguer le DSPIC33CK32MP102 DSC ainsi que les points de test et les connecteurs de prise de banane pour une manipulation facile et sûre du kit lors des tests de banc. L'EPC9531 QSG fournit des instructions détaillées de procédure de fonctionnement.
La carte est programmée et prête à être utilisée lors du déballage. Aucune reprogrammation du périphérique cible n'est requise pour faire fonctionner la carte à moins que des fonctionnalités ou des paramètres tels que la tension de sortie nominale ou la synchronisation de démarrage ne doivent être modifiés.
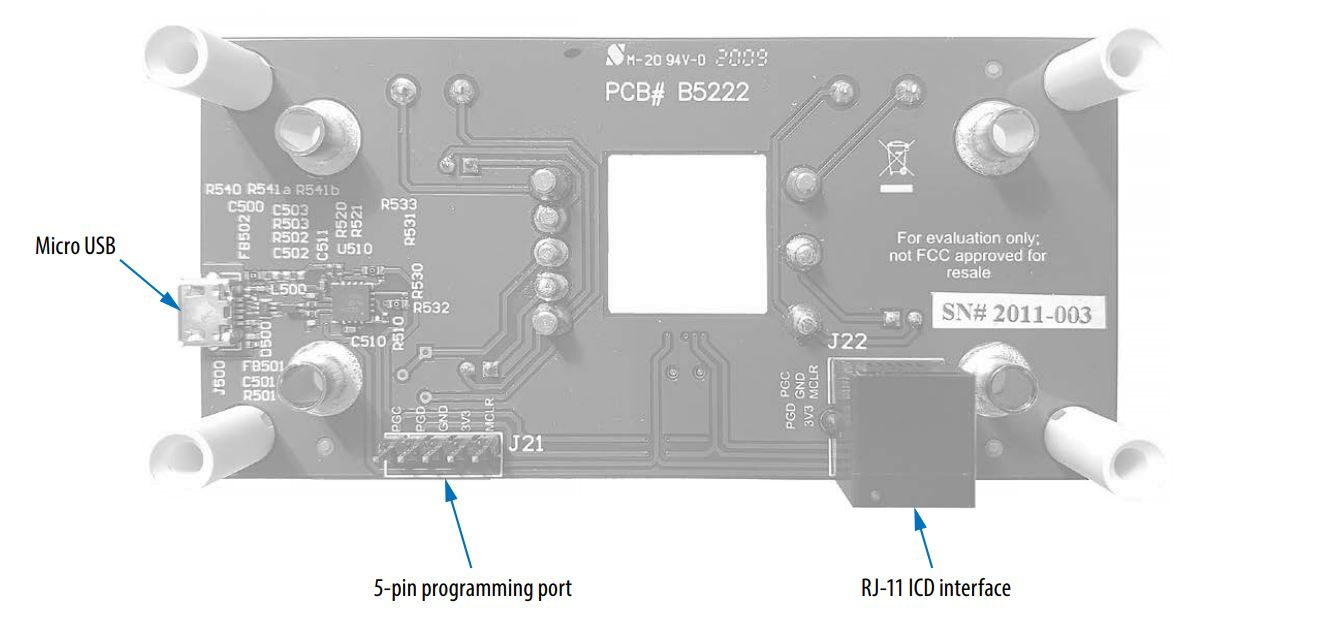
Dans le cas où les fonctionnalités basées sur le micrologiciel doivent être modifiées, le contrôleur Microchip DSPIC33CK peut être reprogrammé à l'aide du port de programmation série en circuit (ICSP) disponible sur l'interface de programmation RJ-11 ainsi que l'en-tête à 5 broches fournies par le fixation de test EPC9531. Ces interfaces prennent en charge tous les programmeurs / débogueurs en circuit de Microchip, tels que MPLAB® ICD4, MPLAB® Real Ice ou MPLAB® Pickit4 et les dérivés précédents. Voir EPC9531 Guide de démarrage rapide pour plus de détails.
Le convertisseur commence automatiquement lorsque plus de 8,5 V CC sont appliqués sur les bornes de sortie resp. 18 V à travers les bornes d'entrée du luminaire de test EPC9531. Il n'est pas recommandé de faire fonctionner la conception de référence EPC9151 sans une capacité de découplage appropriée à l'entrée ou à la sortie. Le luminaire de test EPC9531 fournit le meilleur environnement de test pour le convertisseur. Veuillez lire le guide de démarrage rapide EPC9531 pour obtenir des informations détaillées sur les exigences de configuration et de fonctionnement de cette conception de référence.
La machine d'État passe par les étapes suivantes de l'ordre chronologique:
a) Initialisation
Dans cette étape, les paramètres de boucle de contrôle sont réinitialisés à leurs valeurs par défaut, les sorties PWM sont désactivées, mais le PWM est toujours en cours d'exécution, déclenchant en continu l'ADC pour conserver la tension d'entrée et de sortie d'échantillonnage ainsi que la température de la carte.
b) Réinitialisez ceci est l'état de «retour à la chute» à partir duquel le convertisseur de mâle sera redémarré une fois qu'il a été démarré avec succès et a été arrêté en raison d'une condition de défaut (par exemple, l'entrée sous / sur-tension ou sur la condition de température)
c) La vedette après réinitialisation, la machine d'état attend que tous les drapeaux de défaut soient effacés et que les bits Activer et go soient.
D) Détage de mise sous tension (POD) Une fois que le convertisseur de buck a été effacé, la machine d'état exécutera la procédure de démarrage à partir de la puissance sur le retard. Ce n'est qu'un simple retard pendant lequel le convertisseur restera inactif, mais le gestionnaire de défauts observera les valeurs générées par l'ADC pour les conditions de défaut qui se produisent.
e) Lancez la rampe de tension après l'expiration du retard de mise sous tension, la tension d'entrée et de sortie sera mesurée. Dans le cas où la sortie du convertisseur est pré-biaisée (tension = non nul), le contrôleur d'alimentation sera «pré-chargé» avec un historique de contrôle artificiel et une sortie PWM pour accélérer doucement la tension de sortie à partir de son plus récent niveau.
f) Rample de tension maintenant La boucle de rétroaction numérique et la PWM sont activées et la valeur de référence du système de boucle fermée est incrémentée à chaque exécution de la machine d'état (intervalle de 100 µSEC). La boucle de commande a été ajustée pour fonctionner avec une fréquence croisée de> 10 kHz correspondant à la fréquence de perturbation maximale autorisée pour maintenir le système de contrôle stable.
g) Power Bonne retard après l'augmentation de la tension de référence au niveau nominal prédéfini, la machine d'état passe dans la période de bon retard de puissance. Il s'agit d'un autre délai simple où la boucle de contrôle est en régime permanent en attendant l'expiration de la période de retard.
h) En ligne après l'expiration du bon délai de puissance, le convertisseur tombe en fonctionnement nominal. Dans cette condition, il observe en continu la valeur de référence pour les modifications. Si toute autre partie du micrologiciel modifie la référence du contrôleur, la machine d'état se connectera doucement sur le nouveau niveau au lieu de varier dur la référence.
i) Suspend/Error If the power controller is shut down and reset by external commands (eg fault handler detecting a fault condition or through user-interaction), the state machine is switching into the SUSPEND state, which disables the PWM outputs and control loop execution, clears the control histories and resets the state machine back to RESET
Le système de contrôle bidirectionnel d'EPC9151 est basé sur le contrôle de mode de courant moyen conventionnel (ACMC). Une boucle de tension extérieure régule la tension de sortie en comparant la valeur de rétroaction la plus récente à une référence interne. L'écart est traité par un filtre de compensation discret de type II (2p2z). La sortie de la boucle de tension définit la référence pour les deux boucles de courant interne. Chaque contrôleur de courant de phase traite l'écart entre la référence de courant dynamique donnée et la rétroaction du courant le plus récent individuel. Chaque sortie de boucle de commande de courant ajuste le cycle de service individuel ou la phase, ce qui entraîne des courants de phase étroitement équilibrés. Ce schéma de contrôle est appliqué aux deux, 48 V à 12 V en aval de Buck ainsi qu'à 12 V à 48 V Fonctionnement en amont.
Lorsqu'elle est alimentée à partir d'une seule source CC de chaque côté du convertisseur, la tension de sortie sera maintenue constante jusqu'au courant de sortie maximum de 25 A Buck respectivement. 5.5 a en fonctionnement de boost, auquel étape le convertisseur passe en mode de courant constant, désactive efficacement la régulation de tension.
Ce firmware sert de bloc de construction fondamental des systèmes frontaux du chargeur de batterie en mettant en œuvre un profil de charge spécifique à la chimie ou en tant que convertisseur d'équilibrage entre deux rails de bus alimentés par batterie.
Cette boucle de contrôle peut être activée / désactivée en utilisant le bit Activer dans le mot d'état de la structure de données du contrôleur CNPNZ_T. La modulation de gain de boucle adaptative est en permanence active dès que la boucle de commande est activée.
Le code source de la boucle de contrôle est configuré et généré par le logiciel PowerSMART ™ - Digital Control Library Designer (DCLD).
Ce logiciel de conception supplémentaire est disponible en téléchargement sur les pages GitHub:
Une fois installé, la configuration du contrôleur peut être modifiée. La configuration la plus récente peut être ouverte à partir de l'ide MPLAB X® en cliquant avec le bouton droit sur le fichier 'DPSK3_VMC.DCLD' situé dans le dossier des fichiers importants du chef de projet. Lorsque vous êtes avec le bouton droit sur le bouton droit, sélectionnez «Ouvrir dans le système» pour ouvrir la configuration dans PowerSmart ™ DCLD.
Veuillez vous référer au Guide de l'utilisateur de PowerSmart ™ DCLD qui est inclus dans le logiciel et peut être ouvert à partir du menu d'aide de l'application.
Aucune interface de contrôle utilisateur n'a été ajoutée au firmware. Toute modification du micrologiciel et le fonctionnement fondamental de la conception de référence, y compris la reprogrammation de la tension de sortie nominale, peut être effectué en modifiant les valeurs spécifiques au matériel dans le fichier d'en-tête de description du matériel 'EPC9151_R10_HWDESCR.H' Situé dans 'Project Manager => Fichiers d'en-tête / config'
Les paramètres de convertisseur dans ce fichier sont définis comme des valeurs physiques telles que Volt, ampère, OHM, etc. Chaque valeur définie est convertie en nombres binaires par des macros dits, au moment de la compilation. Ainsi, les utilisateurs n'ont pas à convertir les valeurs manuellement.
Pour programmer le convertisseur pour fournir une tension de sortie nominale différente de l'ensemble DC 12 V par défaut, suivez ces étapes:
Le réglage de la tension de sortie nominale se trouve dans les lignes # 324 à # 326.
#define BUCK_VOUT_NOMINAL (float)12.000 // Nominal output voltage
#define BUCK_VOUT_TOLERANCE_MAX (float)0.500 // Output voltage tolerance [+/-]
#define BUCK_VOUT_TOLERANCE_MIN (float)0.100 // Output voltage tolerance [+/-]
Les paramètres de tolérance ci-dessus incluent la réponse transitoire à une étape de charge maximale. La valeur de la tolérance de tension de sortie maximale 'Buck_Vout_Toleance_Max' est observée par le gestionnaire de défauts. Si la lecture de tension de sortie détourne de la valeur de tension de référence la plus récente de plus que la plage donnée, le convertisseur sera arrêté et une erreur de réglementation sera indiquée. L'alimentation se rétablira automatiquement dès que la condition de défaut a été effacée et la période de retard de récupération spécifiée par buck_regerr_recovery_delay à la ligne n ° 527 de l'EPC9151 Description du matériel Description Le fichier d'en-tête a expiré.
(Les numéros de ligne donnés peuvent être sujets à modification)
Ces exemples de code comprennent une autre boucle de contrôle proportionnelle qui est couramment utilisée pendant les mesures de la réponse en fréquence de la centrale électrique. Lorsque la définition suivante est définie sur true, la boucle de commande principale commune est remplacée par le contrôleur proportionnel.
app_power_control.c, line 33: #define PLANT_MEASUREMENT false
Les contrôleurs proportionnels sont par défaut instables et non adaptés pour réguler la sortie d'une alimentation dans des conditions de fonctionnement normales. Pendant une mesure de l'usine, il est obligatoire que la tension et la charge d'entrée restent stables et ne changent pas.
Pour plus d'informations sur la façon d'effectuer une mesure de la centrale, veuillez lire les sections du Guide de l'utilisateur PowerSmart ™ DCLD.
c) 2020, Microchip Technology Inc.


