raster vision
v0.31.1
Raster Vision是一個開源Python庫,也是用於在衛星,空中和其他大型圖像集(包括傾斜無人機圖像)上構建計算機視覺模型的框架。
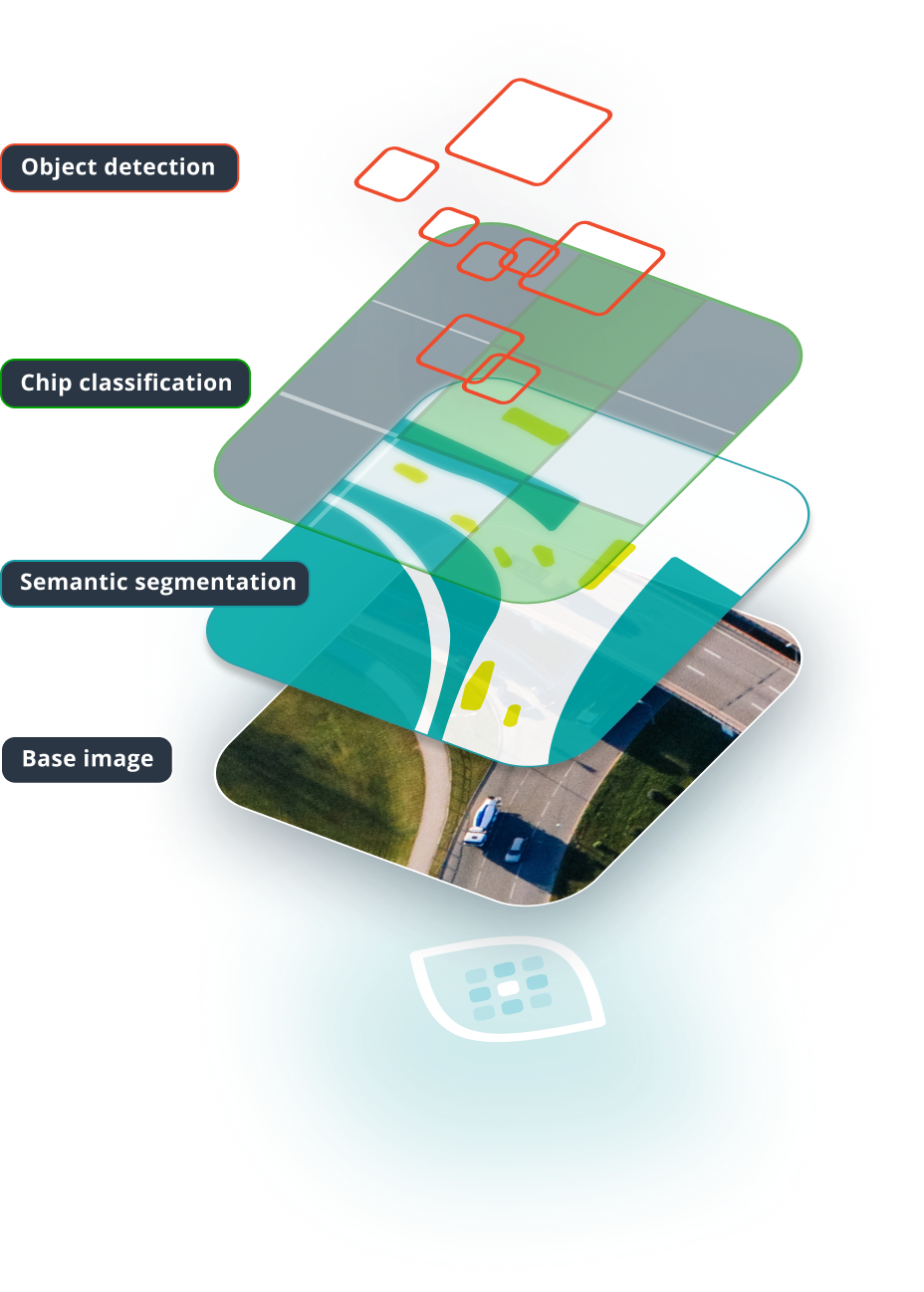
它具有使用Pytorch的後端的芯片分類,對象檢測和語義分割的內置支持。
作為圖書館,柵格視覺提供了一套完整的公用事業,用於處理地理空間深度學習工作流的各個方面:閱讀地理參考的數據,培訓模型,做出預測並以地理參考格式寫出預測。
作為一個低代碼框架,柵格視覺允許用戶(不需要成為深度學習的專家!)快速,重複配置執行機器學習管道的實驗,包括:分析培訓數據,創建培訓芯片,創建培訓模型,創建預測,評估模型以及捆綁模型文件和配置,並配置易於部署。 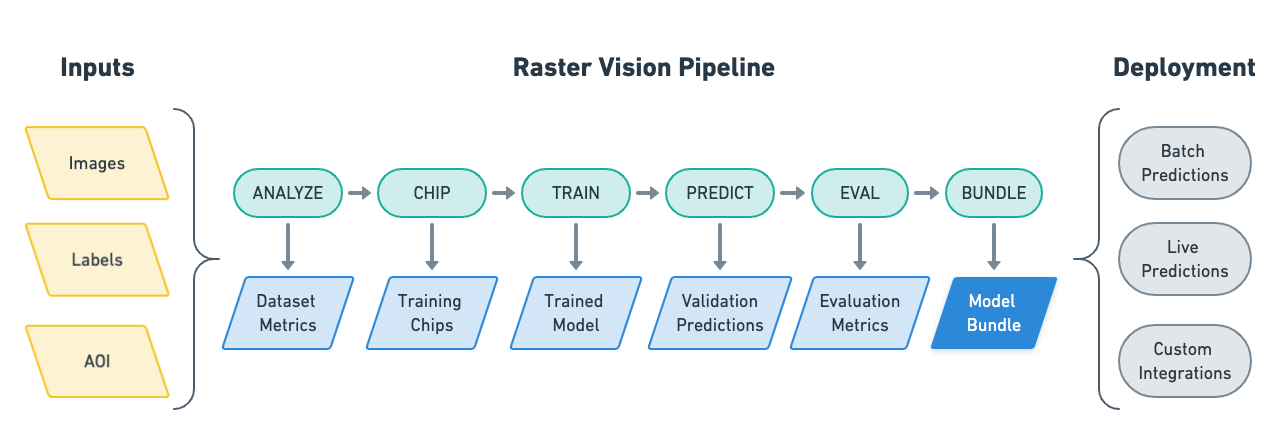
Raster Vision還使用AWS批處理以及AWS SageMaker在雲中進行了內置支持。
有關更多詳細信息,請參見文檔。
有關更多詳細信息,請參見設置文檔。
pip安裝您可以直接通過pip安裝柵格視覺。
pip install rastervision另外,您可以使用Docker映像。 Docker圖像已發佈到quay.io(請參閱“標籤”選項卡)。
我們將每次合併的新標籤發佈到master中,該標籤標記為“提交哈希”的前7個字符。要使用最新版本,請拉出latest後綴,例如raster-vision:pytorch-latest 。 GIT標籤還發布,GitHub標籤名稱為Docker標籤後綴。
您也可以自己從頭開始構建Docker映像。克隆此存儲庫後,運行docker/build ,然後使用docker/run運行容器。
非開發人員可能會發現最容易使用柵格視覺作為低代碼框架,在該框架上,柵格視覺處理所有復雜性,用戶只需要配置一些參數即可。快速啟動指南是對此的良好入口處。可以在示例頁面上找到更高級的示例。
對於開發人員和希望更深入研究或將柵格視覺與自己的代碼相結合的人,最好的起點是用法概述,其次是基本概念和教程。
您可以提出問題並與開發人員交談(讓我們知道您在做什麼!):
有關更多信息,請參閱貢獻。
我們很樂意做出貢獻!在開始工作之前,最好與維護人員聯繫更大的功能或設計更改,因為這將使接受更改的過程更加順暢。
每個向柵格願景貢獻代碼的人都將被要求籤署貢獻者許可協議。請參閱有關說明的貢獻。
柵格視覺是根據Apache 2許可證獲得許可的。請參閱此處的許可證。
可以在此處找到柵格視覺使用的所有依賴的第三方許可證。


