Pointnet_Pointnet2_pytorch
1.0.0
此存儲庫是Pytorch中PointNet和PointNet ++的實現。
2021/03/27:
(1)釋放用於語義分割的預訓練模型,其中PointNet ++可以達到53.5% MIOU。
(2)在log/中釋放用於分類和零件分割的預訓練模型。
2021/03/20:進行分類的更新代碼,包括:
(1)添加訓練ModelNet10數據集的代碼。使用--num_category 10的設置。
(2)添加僅在CPU上運行的代碼。使用--use_cpu的設置。
(3)添加脫機數據預處理的代碼以加速培訓。使用--process_data的設置。
(4)添加均勻採樣的訓練代碼。使用--use_uniform_sample的設置。
2019/11/26:
(1)修復了以前的代碼中的一些錯誤,並添加了數據增強技巧。現在,只有1024分的分類可以達到92.8% !
(2)添加了測試代碼,包括分類和分割,以及具有可視化的語義分割。
(3)將所有模型組織到./models文件中,以便於使用。
最新代碼在Ubuntu 16.04,Cuda10.1,Pytorch 1.6和Python 3.7上進行了測試:
conda install pytorch==1.6.0 cudatoolkit=10.1 -c pytorch在此處下載Alignment ModelNet並保存在data/modelnet40_normal_resampled/ 。
您可以使用以下代碼運行不同的模式。
--process_data 。您可以在此處下載預處理數據,然後將其保存在data/modelnet40_normal_resampled/ 。--num_category 10 。 # ModelNet40
# # Select different models in ./models
# # e.g., pointnet2_ssg without normal features
python train_classification.py --model pointnet2_cls_ssg --log_dir pointnet2_cls_ssg
python test_classification.py --log_dir pointnet2_cls_ssg
# # e.g., pointnet2_ssg with normal features
python train_classification.py --model pointnet2_cls_ssg --use_normals --log_dir pointnet2_cls_ssg_normal
python test_classification.py --use_normals --log_dir pointnet2_cls_ssg_normal
# # e.g., pointnet2_ssg with uniform sampling
python train_classification.py --model pointnet2_cls_ssg --use_uniform_sample --log_dir pointnet2_cls_ssg_fps
python test_classification.py --use_uniform_sample --log_dir pointnet2_cls_ssg_fps
# ModelNet10
# # Similar setting like ModelNet40, just using --num_category 10
# # e.g., pointnet2_ssg without normal features
python train_classification.py --model pointnet2_cls_ssg --log_dir pointnet2_cls_ssg --num_category 10
python test_classification.py --log_dir pointnet2_cls_ssg --num_category 10| 模型 | 準確性 |
|---|---|
| Pointnet(官方) | 89.2 |
| PointNet2(官方) | 91.9 |
| 點網(沒有正常的pytorch) | 90.6 |
| PointNet(pytorch at an Formal) | 91.4 |
| pointnet2_ssg(pytorch沒有正常) | 92.2 |
| pointnet2_ssg(pytorch的正常) | 92.4 |
| pointnet2_msg(pytorch的正常) | 92.8 |
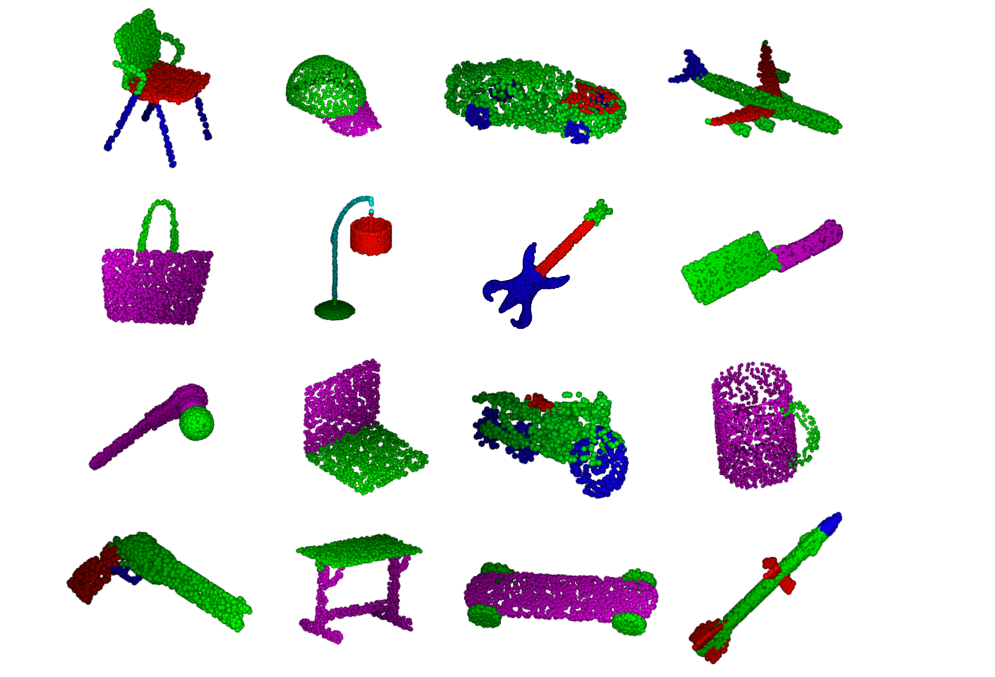
在此處下載對齊塑形並保存在data/shapenetcore_partanno_segmentation_benchmark_v0_normal/ 。
## Check model in ./models
## e.g., pointnet2_msg
python train_partseg.py --model pointnet2_part_seg_msg --normal --log_dir pointnet2_part_seg_msg
python test_partseg.py --normal --log_dir pointnet2_part_seg_msg
| 模型 | 不可能的avg iou | avg class iou |
|---|---|---|
| Pointnet(官方) | 83.7 | 80.4 |
| PointNet2(官方) | 85.1 | 81.9 |
| Pointnet(Pytorch) | 84.3 | 81.1 |
| pointnet2_ssg(pytorch) | 84.9 | 81.8 |
| pointnet2_msg(pytorch) | 85.4 | 82.5 |
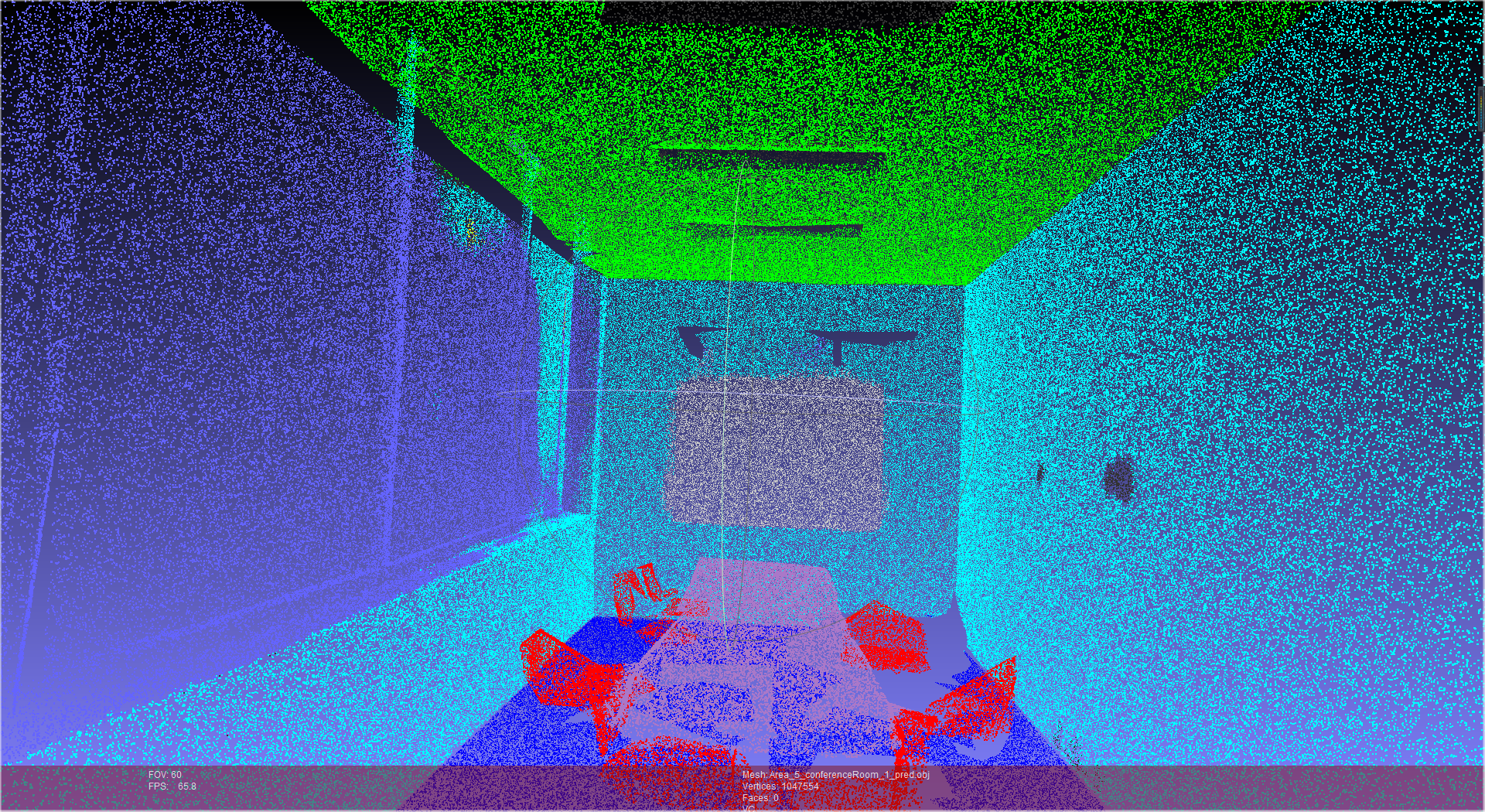
在此處下載3D室內解析數據集( S3DIS ),然後保存在data/s3dis/Stanford3dDataset_v1.2_Aligned_Version/ 。
cd data_utils
python collect_indoor3d_data.py
處理後的數據將保存在data/stanford_indoor3d/ 。
## Check model in ./models
## e.g., pointnet2_ssg
python train_semseg.py --model pointnet2_sem_seg --test_area 5 --log_dir pointnet2_sem_seg
python test_semseg.py --log_dir pointnet2_sem_seg --test_area 5 --visual
可視化結果將保存在log/sem_seg/pointnet2_sem_seg/visual/中,您可以通過meshlab可視化這些.obj文件。
| 模型 | 總體ACC | avg class iou | 檢查點 |
|---|---|---|---|
| Pointnet(Pytorch) | 78.9 | 43.7 | 40.7MB |
| pointnet2_ssg(pytorch) | 83.0 | 53.5 | 11.2MB |
## build C++ code for visualization
cd visualizer
bash build.sh
## run one example
python show3d_balls.py
halimacc/pointnet3
fxia22/pointnet.pytorch
charlesq34/pointnet
charlesq34/pointnet ++
如果您發現此存儲庫對您的研究有用,請考慮引用它和我們的其他作品:
@article{Pytorch_Pointnet_Pointnet2,
Author = {Xu Yan},
Title = {Pointnet/Pointnet++ Pytorch},
Journal = {https://github.com/yanx27/Pointnet_Pointnet2_pytorch},
Year = {2019}
}
@InProceedings{yan2020pointasnl,
title={PointASNL: Robust Point Clouds Processing using Nonlocal Neural Networks with Adaptive Sampling},
author={Yan, Xu and Zheng, Chaoda and Li, Zhen and Wang, Sheng and Cui, Shuguang},
journal={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
year={2020}
}
@InProceedings{yan2021sparse,
title={Sparse Single Sweep LiDAR Point Cloud Segmentation via Learning Contextual Shape Priors from Scene Completion},
author={Yan, Xu and Gao, Jiantao and Li, Jie and Zhang, Ruimao, and Li, Zhen and Huang, Rui and Cui, Shuguang},
journal={AAAI Conference on Artificial Intelligence ({AAAI})},
year={2021}
}
@InProceedings{yan20222dpass,
title={2DPASS: 2D Priors Assisted Semantic Segmentation on LiDAR Point Clouds},
author={Xu Yan and Jiantao Gao and Chaoda Zheng and Chao Zheng and Ruimao Zhang and Shuguang Cui and Zhen Li},
year={2022},
journal={ECCV}
}


