Pointnet_Pointnet2_pytorch
1.0.0
Este repo é implementação para PointNet e PointNet ++ em Pytorch.
2021/03/27:
(1) Libere modelos pré-treinados para segmentação semântica, onde o PointNet ++ pode atingir 53,5% de miou.
(2) Libere modelos pré-treinados para classificação e segmentação de peças em log/ .
2021/03/20: Códigos de atualização para classificação, incluindo:
(1) Adicione códigos para treinamento do modeloNET10 DATASET. Usando a configuração de --num_category 10 .
(2) Adicione códigos para executar apenas na CPU. Usando a configuração de --use_cpu .
(3) Adicione códigos para pré -processamento de dados offline para acelerar o treinamento. Usando a configuração de --process_data .
(4) Adicione códigos para treinamento com amostragem uniforme. Usando a configuração de --use_uniform_sample .
2019/11/26:
(1) Corrigido alguns erros nos códigos anteriores e adicionou truques de aumento de dados. Agora, a classificação por apenas 1024 pontos pode atingir 92,8% !
(2) Adicionado códigos de teste, incluindo classificação e segmentação e segmentação semântica com visualização.
(3) Organizou todos os modelos em arquivos ./models para facilitar o uso.
Os códigos mais recentes são testados no Ubuntu 16.04, Cuda10.1, Pytorch 1.6 e Python 3.7:
conda install pytorch==1.6.0 cudatoolkit=10.1 -c pytorch Faça o download do alinhamento ModelNet aqui e salve em data/modelnet40_normal_resampled/ .
Você pode executar modos diferentes com os seguintes códigos.
--process_data na primeira execução. Você pode baixar os dados pré-Processd aqui e salvá-los em data/modelnet40_normal_resampled/ .--num_category 10 . # ModelNet40
# # Select different models in ./models
# # e.g., pointnet2_ssg without normal features
python train_classification.py --model pointnet2_cls_ssg --log_dir pointnet2_cls_ssg
python test_classification.py --log_dir pointnet2_cls_ssg
# # e.g., pointnet2_ssg with normal features
python train_classification.py --model pointnet2_cls_ssg --use_normals --log_dir pointnet2_cls_ssg_normal
python test_classification.py --use_normals --log_dir pointnet2_cls_ssg_normal
# # e.g., pointnet2_ssg with uniform sampling
python train_classification.py --model pointnet2_cls_ssg --use_uniform_sample --log_dir pointnet2_cls_ssg_fps
python test_classification.py --use_uniform_sample --log_dir pointnet2_cls_ssg_fps
# ModelNet10
# # Similar setting like ModelNet40, just using --num_category 10
# # e.g., pointnet2_ssg without normal features
python train_classification.py --model pointnet2_cls_ssg --log_dir pointnet2_cls_ssg --num_category 10
python test_classification.py --log_dir pointnet2_cls_ssg --num_category 10| Modelo | Precisão |
|---|---|
| Pointnet (oficial) | 89.2 |
| PointNet2 (oficial) | 91.9 |
| PointNet (Pytorch sem normal) | 90.6 |
| PointNet (Pytorch com normal) | 91.4 |
| PointNet2_ssg (pytorch sem normal) | 92.2 |
| PointNet2_ssg (pytorch com normal) | 92.4 |
| PointNet2_MSG (pytorch com normal) | 92.8 |
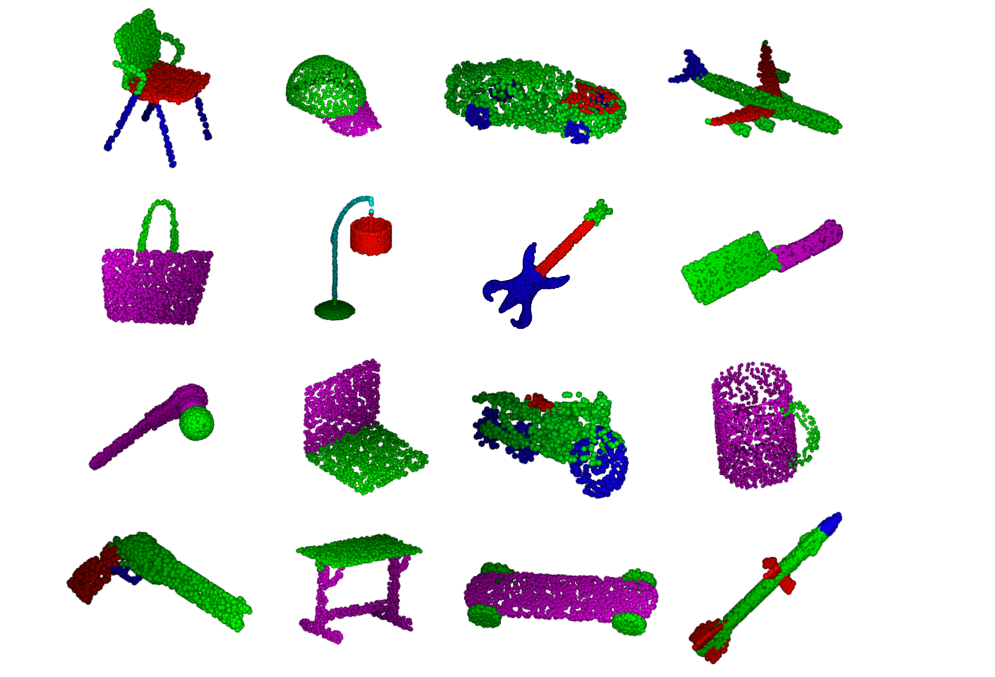
Faça o download do alinhamento SHAPENET aqui e salve em data/shapenetcore_partanno_segmentation_benchmark_v0_normal/ .
## Check model in ./models
## e.g., pointnet2_msg
python train_partseg.py --model pointnet2_part_seg_msg --normal --log_dir pointnet2_part_seg_msg
python test_partseg.py --normal --log_dir pointnet2_part_seg_msg
| Modelo | Inctância AVG IOU | CLASSE AVG IOU |
|---|---|---|
| Pointnet (oficial) | 83.7 | 80.4 |
| PointNet2 (oficial) | 85.1 | 81.9 |
| PointNet (Pytorch) | 84.3 | 81.1 |
| PointNet2_ssg (Pytorch) | 84.9 | 81.8 |
| PointNet2_MSG (Pytorch) | 85.4 | 82.5 |
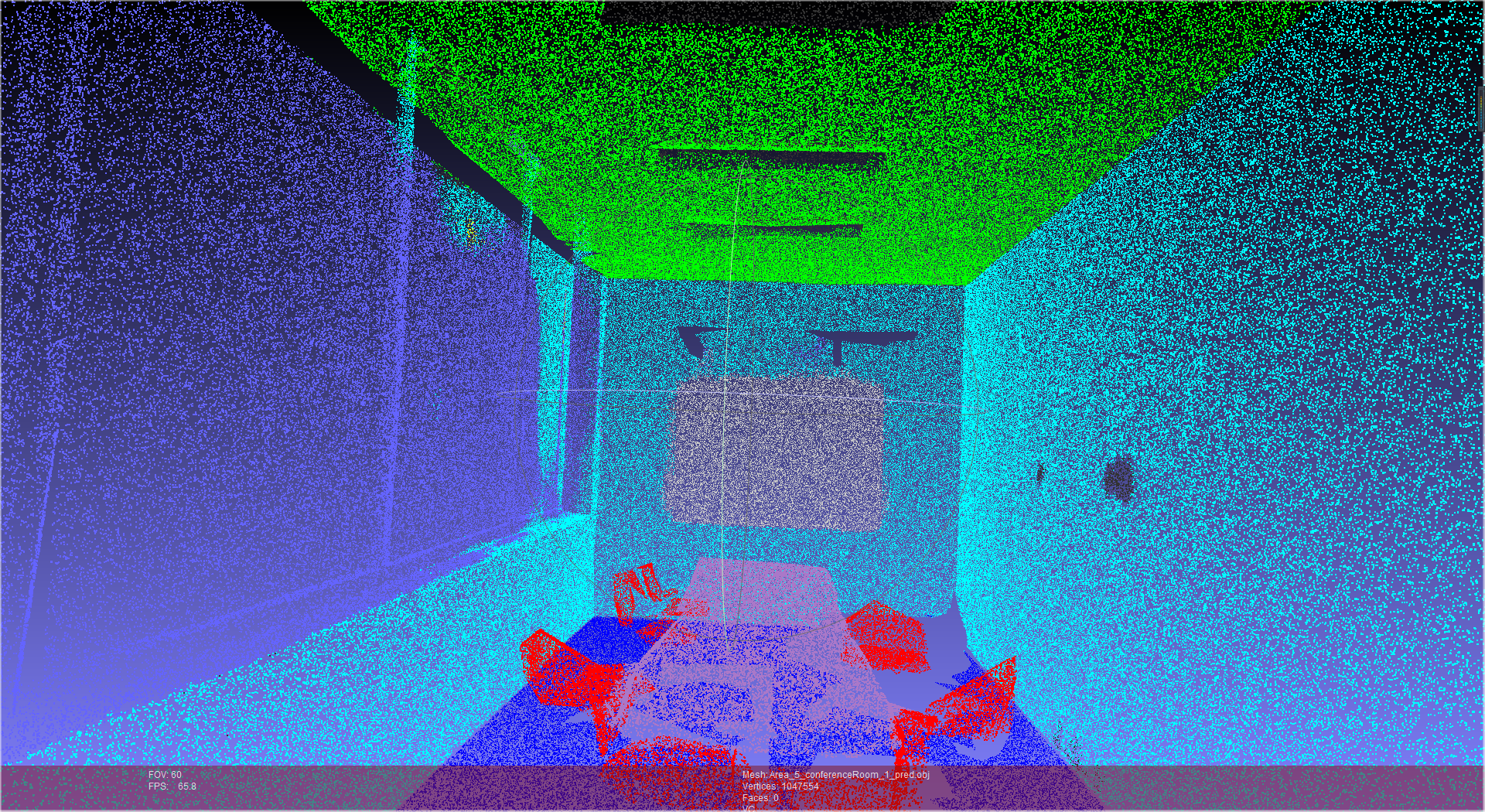
Faça o download do conjunto de dados de análise interno 3D ( S3DIS ) aqui e salve em data/s3dis/Stanford3dDataset_v1.2_Aligned_Version/ .
cd data_utils
python collect_indoor3d_data.py
Os dados processados salvarão em data/stanford_indoor3d/ .
## Check model in ./models
## e.g., pointnet2_ssg
python train_semseg.py --model pointnet2_sem_seg --test_area 5 --log_dir pointnet2_sem_seg
python test_semseg.py --log_dir pointnet2_sem_seg --test_area 5 --visual
Os resultados da visualização salvarão no log/sem_seg/pointnet2_sem_seg/visual/ e você poderá visualizar esse arquivo .obj por meshlab.
| Modelo | ACC geral | CLASSE AVG IOU | Ponto de verificação |
|---|---|---|---|
| PointNet (Pytorch) | 78.9 | 43.7 | 40,7 MB |
| PointNet2_ssg (Pytorch) | 83.0 | 53.5 | 11,2 MB |
## build C++ code for visualization
cd visualizer
bash build.sh
## run one example
python show3d_balls.py
Halimacc/PointNet3
fxia22/pointnet.pytorch
Charlesq34/PointNet
Charlesq34/PointNet ++
Se você achar esse repositório útil em sua pesquisa, considere citá -lo e nossos outros trabalhos:
@article{Pytorch_Pointnet_Pointnet2,
Author = {Xu Yan},
Title = {Pointnet/Pointnet++ Pytorch},
Journal = {https://github.com/yanx27/Pointnet_Pointnet2_pytorch},
Year = {2019}
}
@InProceedings{yan2020pointasnl,
title={PointASNL: Robust Point Clouds Processing using Nonlocal Neural Networks with Adaptive Sampling},
author={Yan, Xu and Zheng, Chaoda and Li, Zhen and Wang, Sheng and Cui, Shuguang},
journal={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
year={2020}
}
@InProceedings{yan2021sparse,
title={Sparse Single Sweep LiDAR Point Cloud Segmentation via Learning Contextual Shape Priors from Scene Completion},
author={Yan, Xu and Gao, Jiantao and Li, Jie and Zhang, Ruimao, and Li, Zhen and Huang, Rui and Cui, Shuguang},
journal={AAAI Conference on Artificial Intelligence ({AAAI})},
year={2021}
}
@InProceedings{yan20222dpass,
title={2DPASS: 2D Priors Assisted Semantic Segmentation on LiDAR Point Clouds},
author={Xu Yan and Jiantao Gao and Chaoda Zheng and Chao Zheng and Ruimao Zhang and Shuguang Cui and Zhen Li},
year={2022},
journal={ECCV}
}


