Pointnet_Pointnet2_pytorch
1.0.0
Ce repo est l'implémentation de PointNet et PointNet ++ dans Pytorch.
2021/03/27:
(1) Libérer les modèles pré-formés pour la segmentation sémantique, où PointNet ++ peut atteindre 53,5% MIOU.
(2) Libérer les modèles pré-formés pour la classification et la segmentation des pièces dans log/ .
2021/03/20: Mettez à jour les codes de classification, y compris:
(1) Ajouter des codes pour la formation ModelNet10 DataSet. Utilisation du paramètre de --num_category 10 .
(2) Ajouter des codes pour fonctionner uniquement sur CPU. Utilisation du réglage de --use_cpu .
(3) Ajouter des codes pour le prétraitement des données hors ligne pour accélérer la formation. Utilisation du paramètre de --process_data .
(4) Ajouter des codes pour une formation avec un échantillonnage uniforme. Utilisation du réglage de --use_uniform_sample .
2019/11/26:
(1) Correction de quelques erreurs dans les codes précédents et ajouté des astuces d'augmentation des données. Maintenant, la classification par seulement 1024 points peut atteindre 92,8% !
(2) Ajout des codes de test, y compris la classification et la segmentation, et la segmentation sémantique avec visualisation.
(3) a organisé tous les modèles en fichiers ./models pour une utilisation facile.
Les derniers codes sont testés sur Ubuntu 16.04, CUDA10.1, Pytorch 1.6 et Python 3.7:
conda install pytorch==1.6.0 cudatoolkit=10.1 -c pytorch Téléchargez l'alignement ModelNet ici et enregistrez dans data/modelnet40_normal_resampled/ .
Vous pouvez exécuter différents modes avec les codes suivants.
--process_data lors de la première exécution. Vous pouvez télécharger des données pré-processs ici et les enregistrer dans data/modelnet40_normal_resampled/ .--num_category 10 . # ModelNet40
# # Select different models in ./models
# # e.g., pointnet2_ssg without normal features
python train_classification.py --model pointnet2_cls_ssg --log_dir pointnet2_cls_ssg
python test_classification.py --log_dir pointnet2_cls_ssg
# # e.g., pointnet2_ssg with normal features
python train_classification.py --model pointnet2_cls_ssg --use_normals --log_dir pointnet2_cls_ssg_normal
python test_classification.py --use_normals --log_dir pointnet2_cls_ssg_normal
# # e.g., pointnet2_ssg with uniform sampling
python train_classification.py --model pointnet2_cls_ssg --use_uniform_sample --log_dir pointnet2_cls_ssg_fps
python test_classification.py --use_uniform_sample --log_dir pointnet2_cls_ssg_fps
# ModelNet10
# # Similar setting like ModelNet40, just using --num_category 10
# # e.g., pointnet2_ssg without normal features
python train_classification.py --model pointnet2_cls_ssg --log_dir pointnet2_cls_ssg --num_category 10
python test_classification.py --log_dir pointnet2_cls_ssg --num_category 10| Modèle | Précision |
|---|---|
| PointNet (officiel) | 89.2 |
| PointNet2 (officiel) | 91.9 |
| PointNet (pytorch sans normale) | 90.6 |
| PointNet (pytorch avec normal) | 91.4 |
| PointNet2_SSG (Pytorch sans normale) | 92.2 |
| PointNet2_SSG (Pytorch avec normal) | 92.4 |
| PointNet2_MSG (Pytorch avec normal) | 92.8 |
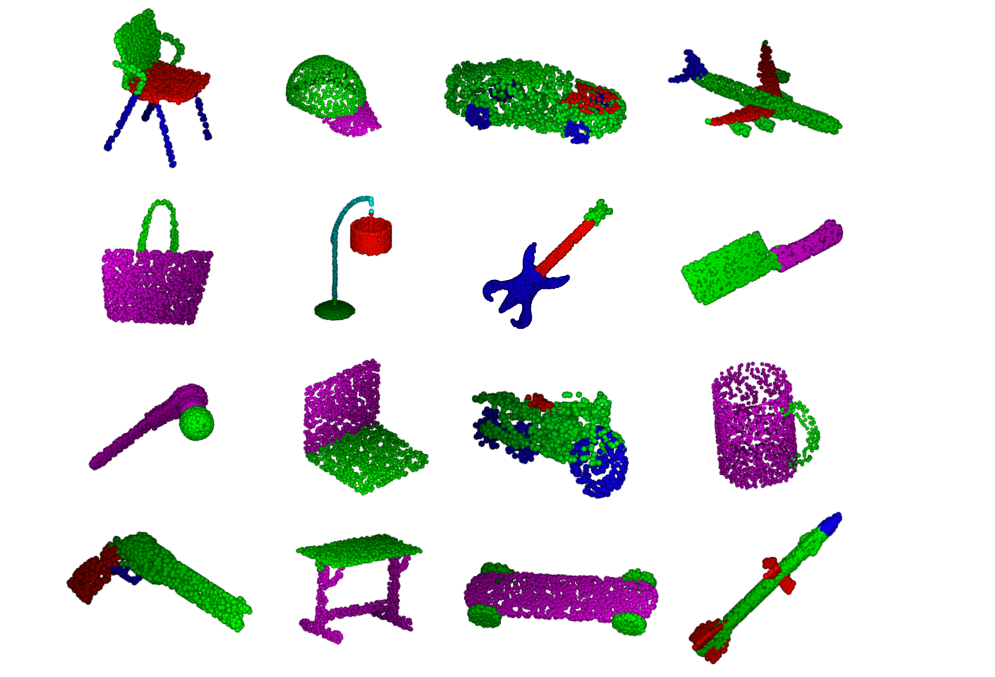
Téléchargez l'alignement ShapeNet ici et enregistrez dans data/shapenetcore_partanno_segmentation_benchmark_v0_normal/ .
## Check model in ./models
## e.g., pointnet2_msg
python train_partseg.py --model pointnet2_part_seg_msg --normal --log_dir pointnet2_part_seg_msg
python test_partseg.py --normal --log_dir pointnet2_part_seg_msg
| Modèle | Inctance avg iou | Classe avg iou |
|---|---|---|
| PointNet (officiel) | 83.7 | 80.4 |
| PointNet2 (officiel) | 85.1 | 81.9 |
| PointNet (Pytorch) | 84.3 | 81.1 |
| PointNet2_SSG (Pytorch) | 84.9 | 81.8 |
| PointNet2_MSG (Pytorch) | 85.4 | 82.5 |
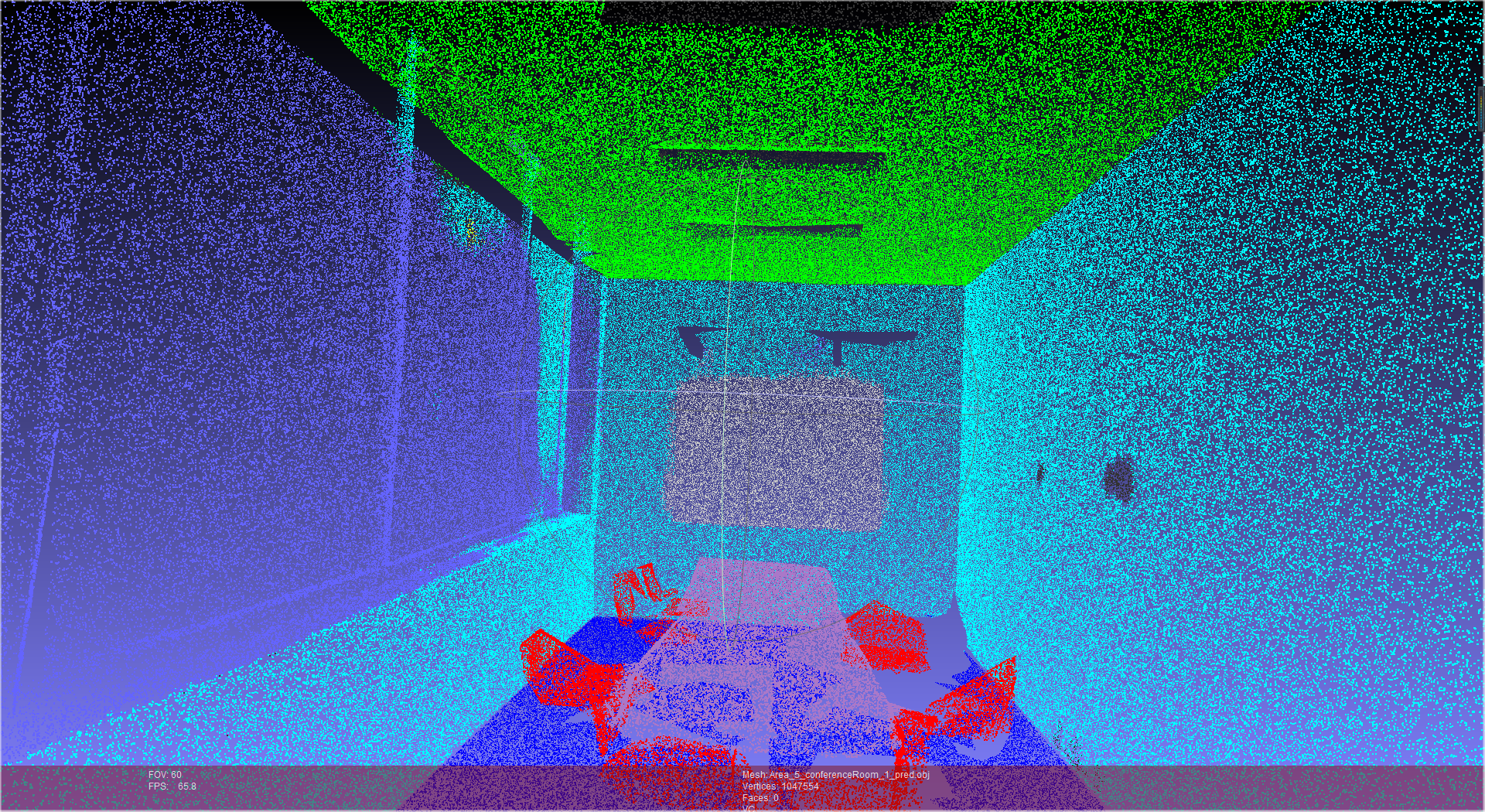
Téléchargez le jeu de données d'analyse intérieure 3D ( S3DIS ) ici et enregistrez dans data/s3dis/Stanford3dDataset_v1.2_Aligned_Version/ .
cd data_utils
python collect_indoor3d_data.py
Les données traitées seront enregistrées dans data/stanford_indoor3d/ .
## Check model in ./models
## e.g., pointnet2_ssg
python train_semseg.py --model pointnet2_sem_seg --test_area 5 --log_dir pointnet2_sem_seg
python test_semseg.py --log_dir pointnet2_sem_seg --test_area 5 --visual
Les résultats de la visualisation seront enregistrés dans log/sem_seg/pointnet2_sem_seg/visual/ et vous pouvez visualiser ces fichiers .obj par MeshLab.
| Modèle | ACC global | Classe avg iou | Point de contrôle |
|---|---|---|---|
| PointNet (Pytorch) | 78.9 | 43.7 | 40,7 Mo |
| PointNet2_SSG (Pytorch) | 83.0 | 53.5 | 11.2 Mo |
## build C++ code for visualization
cd visualizer
bash build.sh
## run one example
python show3d_balls.py
halimacc / pointnet3
fxia22 / pointnet.pytorch
Charlesq34 / PointNet
Charlesq34 / PointNet ++
Si vous trouvez ce dépôt utile dans vos recherches, veuillez envisager de le citer et nos autres œuvres:
@article{Pytorch_Pointnet_Pointnet2,
Author = {Xu Yan},
Title = {Pointnet/Pointnet++ Pytorch},
Journal = {https://github.com/yanx27/Pointnet_Pointnet2_pytorch},
Year = {2019}
}
@InProceedings{yan2020pointasnl,
title={PointASNL: Robust Point Clouds Processing using Nonlocal Neural Networks with Adaptive Sampling},
author={Yan, Xu and Zheng, Chaoda and Li, Zhen and Wang, Sheng and Cui, Shuguang},
journal={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
year={2020}
}
@InProceedings{yan2021sparse,
title={Sparse Single Sweep LiDAR Point Cloud Segmentation via Learning Contextual Shape Priors from Scene Completion},
author={Yan, Xu and Gao, Jiantao and Li, Jie and Zhang, Ruimao, and Li, Zhen and Huang, Rui and Cui, Shuguang},
journal={AAAI Conference on Artificial Intelligence ({AAAI})},
year={2021}
}
@InProceedings{yan20222dpass,
title={2DPASS: 2D Priors Assisted Semantic Segmentation on LiDAR Point Clouds},
author={Xu Yan and Jiantao Gao and Chaoda Zheng and Chao Zheng and Ruimao Zhang and Shuguang Cui and Zhen Li},
year={2022},
journal={ECCV}
}


