Nn-dependability-kit
NN-predability-KIT เป็นเครื่องมือการวิจัยโอเพนซอร์ซเพื่อช่วยเครือข่ายประสาทวิศวกรรมสำหรับโดเมนที่สำคัญต่อความปลอดภัย
C.-H. Cheng, C.-H. Huang และ G. Nührenberg NN-dependability-KIT: เครือข่ายประสาทวิศวกรรมสำหรับระบบขับขี่แบบอิสระที่สำคัญต่อความปลอดภัย https://arxiv.org/abs/1811.06746
ใบอนุญาต
GNU Affero ทั่วไปใบอนุญาตสาธารณะ (AGPL) เวอร์ชัน 3
คู่มือ
ดู nn_dependability_kit_manual.pdf
ลองใช้เครื่องมือ
ตัวอย่างจะถูกนำเสนอเป็นสมุดบันทึก Jupyter เพื่อให้เข้าใจแนวคิดทีละขั้นตอน
- [การสร้างตัวชี้วัดและการสร้างกรณีการทดสอบ] GTSRB_NEURON2PROUCTIONCOVERAGE_TESTGEN.IPYNB หรือ GTSRB_ADDITIONALMETRICS.IPYNB หรือ SCINARIO_COVERAGE_A9.IPYNB หรือ KITTI_SCENARIO_COVERAGE.IPYNB ssd_intertationprecision.ipynb
- [การตรวจสอบอย่างเป็นทางการ] TargetVehicleProcessingNetwork_formalverification.ipynb
- [การตรวจสอบรันไทม์] gtsrb_runtimemonitoring.ipynb หรือ mnist_runtimemonitoring.ipynb
โครงสร้าง
มีสี่แพ็คเกจภายใต้การพึ่งพา NNDA
- พื้นฐาน: ผู้อ่านสำหรับแบบจำลองเช่นเดียวกับการเป็นตัวแทนระดับกลางของ NN (เพื่อวัตถุประสงค์ในการตรวจสอบ)
- ตัวชี้วัด: คำนวณตัวชี้วัดความน่าเชื่อถือสำหรับเครือข่ายประสาท
- ATG: การสร้างกรณีทดสอบอัตโนมัติเพื่อปรับปรุงตัวชี้วัด
- อย่างเป็นทางการ: การตรวจสอบอย่างเป็นทางการ (การวิเคราะห์แบบคงที่การแก้ข้อ จำกัด ) ของเครือข่ายประสาท
- RV: การตรวจสอบรันไทม์ของเครือข่ายประสาท
แพ็คเกจงูหลามที่สำคัญเป็นข้อกำหนด
pytorch + numpy + matplotlib + jupyter
[การสร้างกรณีทดสอบ] เครื่องมือวิจัยการเพิ่มประสิทธิภาพของ Google
[การตรวจสอบการตรวจสอบ / การวิเคราะห์คง
- CBC Solver ที่จัดส่งล่วงหน้าด้วยเยื่อกระดาษอาจพังในการแก้ปัญหาบางอย่าง เครื่องยนต์วิเคราะห์แบบสแตติกสันนิษฐานว่าตัวแก้ปัญหา GLPK สามารถเรียกได้ (โปรดตั้งค่าตัวแปรพา ธ ) เช่นเมื่อใดก็ตามที่ CBC ล่ม GLPK จะถูกกระตุ้นโดยอัตโนมัติเป็นการเปลี่ยน น่าเสียดายที่สิ่งนี้ไม่สามารถรับประกันได้ว่าตัวแก้ปัญหาทั้งสองจะไม่พังในเวลาเดียวกัน ดังนั้นสำหรับการใช้งานอุตสาหกรรมเราแนะนำอย่างยิ่งให้ใช้ IBM CPLEX เป็นตัวแก้ปัญหา MILP
- [gnu glpk] http://www.gnu.org/software/glpk/
- [gplk บน windows] http://winglpk.sourceforge.net/
[การตรวจสอบเวลาทำงาน] DD (ไดอะแกรมการตัดสินใจแบบไบนารีใช้โดยใช้ Python)
ใช้ข้อกำหนด. txt เพื่อติดตั้งการพึ่งพาเพื่อเรียกใช้สมุดบันทึกส่วนใหญ่ (ไม่รวม TensorFlow)
สิ่งพิมพ์ที่เกี่ยวข้อง
- [การสร้างตัวชี้วัดและการสร้างกรณีการทดสอบ] https://arxiv.org/abs/1806.02338
- [การตรวจสอบอย่างเป็นทางการ] https://arxiv.org/abs/1705.01040, https://arxiv.org/abs/1904.04706
- [การตรวจสอบรันไทม์] https://arxiv.org/abs/1809.06573
- [ตัวอย่าง SSD] ตัวอย่างใช้รูปภาพสองสามภาพจากชุดข้อมูล VOC2012: Pascal Visual Object Classes (VOC) Challenge Everingham, M. , Van Gool, L. , Williams, CKI, Winn, J. และ Zisserman, A. วารสาร International Journal of Computer Vision, 88 (2), 303-338, 2010, 2010, 2010
หัวข้ออื่น ๆ
A. ตัวชี้วัดที่เกี่ยวข้องกับความแม่นยำในการติดต่อและความไวของการบดเคี้ยว
1. แพ็คเกจเพิ่มเติมที่จะติดตั้ง
- [ตัวชี้วัด] Saliency (https://github.com/pair-code/saliency) ใช้ในวิธีต่อไปนี้:
# init submodule for saliency
cd nndependability/metrics/saliency-source/
git submodule init
git submodule update
cd ..
ln -s saliency-source/saliency saliency
cd ../../
2. การเตรียมการสำหรับตัวอย่าง SSD
cd models/SSD-Tensorflow/
git submodule init
git submodule update
# prepare weights
cd checkpoints/
unzip ssd_300_vgg.ckpt.zip
cd ../
# install custom changes to module SSD-Tensorflow that allows using saliency
git apply ../ssd_tensorflow_diff.diff
cd ../../
B. ความท้าทายในการตรวจสอบอย่างเป็นทางการเนื่องจากขาดข้อมูลจำเพาะอินพุตและความยืดหยุ่น
ในการทำการตรวจสอบอย่างเป็นทางการเกี่ยวกับเครือข่ายประสาทมีปัญหาสองประการที่เห็นกันทั่วไป
- ความสามารถในการปรับขนาดของการตรวจสอบอย่างเป็นทางการอาจไม่สามารถจัดการกับเครือข่ายที่ซับซ้อนและลึกมากได้มาก
- ไม่ทราบรูปร่างของ "รูปร่างของอินพุต" อันที่จริงหนึ่งปกติทำให้ข้อมูลปกติดังนั้นทุกอินพุตมักจะมีช่วง [-1,1] แต่เราอาจต้องการที่จะมี "การเปลี่ยนแปลงมากเกินไป" ที่เข้มงวดมากขึ้นเหนือข้อมูลการฝึกอบรม
ใน KIT ที่พึ่งพา NN เราแนะนำให้ผู้ใช้ดำเนินการตามขั้นตอนต่อไปนี้
- ทำการวิเคราะห์โดยการใช้ เครือข่ายย่อยของเลเยอร์ที่ใกล้เคียงกับเอาต์พุต เช่นเครือข่ายสีเหลืองของรูปด้านล่าง หากสำหรับทุกอินพุตไปยังเครือข่ายสีเหลืองหนึ่งรับประกันว่าเอาต์พุตที่ไม่ดีจะไม่ถูกสร้างขึ้นดังนั้นสำหรับทุกอินพุตไปยังเครือข่ายที่ลึกและซับซ้อนดั้งเดิมจะไม่มีการผลิตเอาต์พุตที่ไม่ดี
- พารามิเตอร์ที่ 2 และ 3 ในฟังก์ชั่น loadmlpfrompytorch () ใน nndependability/basics/pytorchreader.py สนับสนุนแนวคิดดังกล่าว
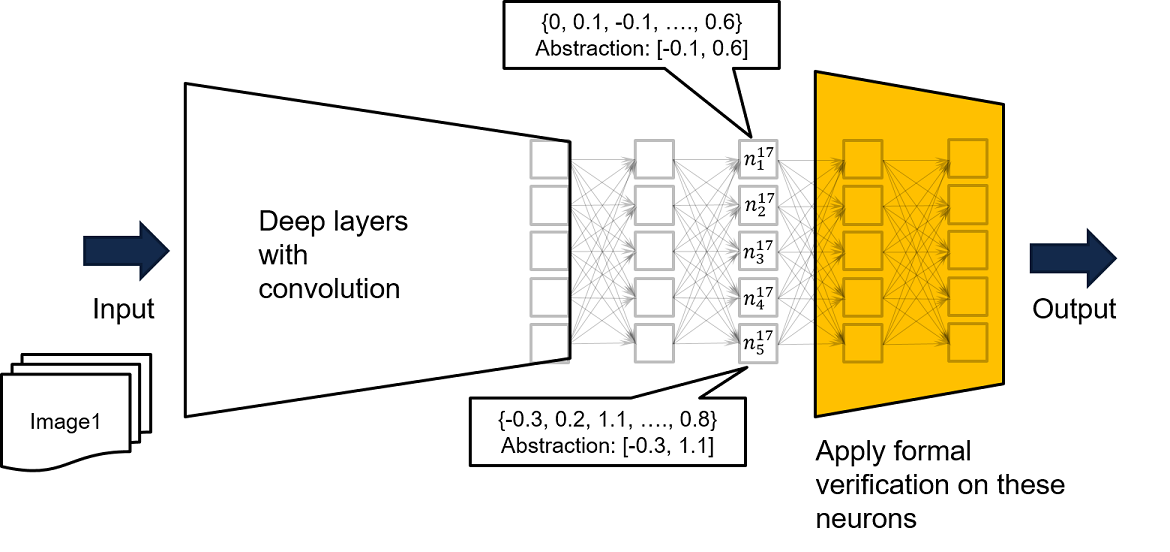
เนื่องจากอินพุตไปยังเครือข่ายที่สมบูรณ์อาจนำไปสู่ค่าบางอย่างสำหรับอินพุตของเครือข่ายสีเหลืองหากคุณสมบัติ ด้านความปลอดภัยไม่สามารถพิสูจน์ได้ในเครือข่ายสีเหลืองคำแนะนำเพิ่มเติมของเราคือการป้อนเครือข่ายที่สมบูรณ์ด้วยข้อมูลการฝึกอบรม ตัวอย่างสามารถพบได้ในเซลล์ประสาท n^17_ {1} โดยที่เรียกใช้เครือข่ายด้วยข้อมูลการฝึกอบรมที่มีอยู่ทั้งหมดเรารู้ว่าข้อมูลการฝึกอบรมทำให้ผลลัพธ์ของ n^17_ {1} ล้อมรอบด้วย [-0.1, 0.6] เราสามารถใช้ขอบเขตที่บันทึกไว้เป็นข้อ จำกัด อินพุตสำหรับเครือข่ายสีเหลืองเพื่อทำการตรวจสอบอย่างเป็นทางการ
- นอกเหนือจากการใช้ช่วงเวลาแล้วเรายังสามารถบันทึกข้อ จำกัด แปดเหลี่ยมหรือแม้แต่รูปแบบการเปิดใช้งานเซลล์ประสาทเพื่อสร้างการตรวจสอบที่เข้มงวดมากขึ้นของข้อมูลที่เข้าชม
ความถูกต้องของการตรวจสอบขึ้นอยู่กับสมมติฐานที่ว่าเป็นไปไม่ได้ที่จะมีค่าเซลล์ประสาทที่อยู่นอกช่วงเวลาที่สร้างขึ้นซึ่งเป็นหลักฐาน การสันนิษฐาน สมมติฐานสามารถตรวจสอบได้ง่ายในรันไทม์


