ViTPose
1.0.0
結果|更新|使用法| todo |認める
このブランチには、ヒトポーズ推定とvitose+:一般的なボディポーズ推定のためのvitose+:Vision Transformer Foundationモデルのためのvitspose:Simple Vision Transformer BaselinesのPytorch実装が含まれています。 MS Coco Keypoint Test-DEVセットで81.1 APを取得します。
検出結果を使用して、人に56のマップを取得する検出器の結果。ここの構成は、トレーニングとテストの両方に適しています。
クラシックデコーダー付き
| モデル | プレレイン | 解決 | AP | ar | config | ログ | 重さ |
|---|---|---|---|---|---|---|---|
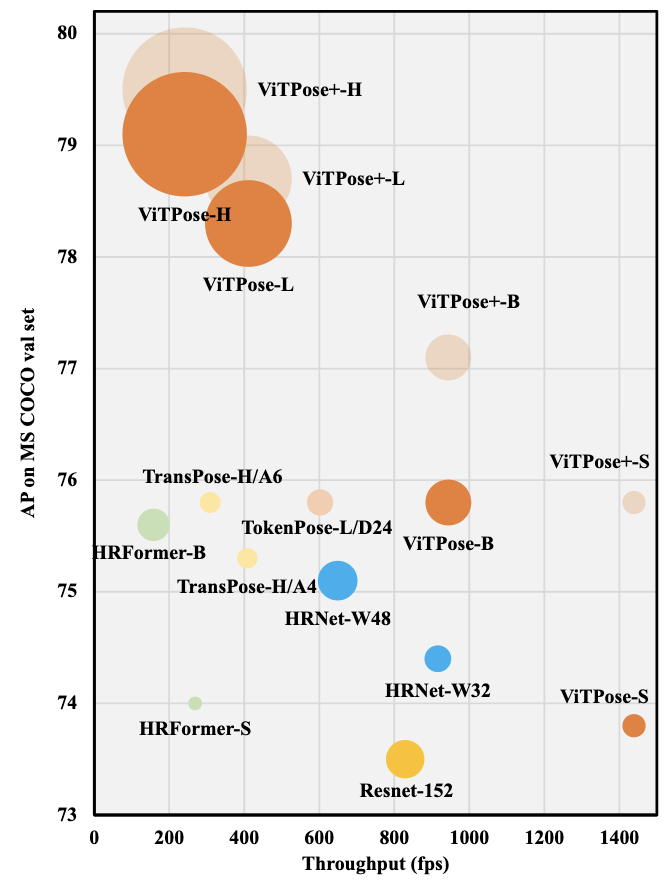
| vitopse-s | メイ | 256x192 | 73.8 | 79.2 | config | ログ | onedrive |
| vitose-b | メイ | 256x192 | 75.8 | 81.1 | config | ログ | onedrive |
| vitose-l | メイ | 256x192 | 78.3 | 83.5 | config | ログ | onedrive |
| vitose-h | メイ | 256x192 | 79.1 | 84.1 | config | ログ | onedrive |
単純なデコーダー付き
| モデル | プレレイン | 解決 | AP | ar | config | ログ | 重さ |
|---|---|---|---|---|---|---|---|
| vitopse-s | メイ | 256x192 | 73.5 | 78.9 | config | ログ | onedrive |
| vitose-b | メイ | 256x192 | 75.5 | 80.9 | config | ログ | onedrive |
| vitose-l | メイ | 256x192 | 78.2 | 83.4 | config | ログ | onedrive |
| vitose-h | メイ | 256x192 | 78.9 | 84.0 | config | ログ | onedrive |
注* Issue#24で説明したように、クラウドトレーニングセットと他のデータセットに検証画像に複製画像が存在する場合があります。評価にこれらのモデルを使用する場合は、注意してください。 ReferenceのためにCropse Datasetなしで結果を提供します。
MS Coco Valセットの結果
検出結果を使用して、人に56のマップを取得する検出器の結果。ここの構成は評価のためだけです。
| モデル | データセット | 解決 | AP | ar | config | 重さ |
|---|---|---|---|---|---|---|
| vitose-b | coco+aic+mpii | 256x192 | 77.1 | 82.2 | config | onedrive |
| vitose-l | coco+aic+mpii | 256x192 | 78.7 | 83.8 | config | onedrive |
| vitose-h | coco+aic+mpii | 256x192 | 79.5 | 84.5 | config | onedrive |
| vitose-g | coco+aic+mpii | 576x432 | 81.0 | 85.6 | ||
| vitopse-b* | coco+aic+mpii+クラウド | 256x192 | 77.5 | 82.6 | config | onedrive |
| vitose-l* | coco+aic+mpii+クラウド | 256x192 | 79.1 | 84.1 | config | onedrive |
| vitose-h* | coco+aic+mpii+クラウド | 256x192 | 79.8 | 84.8 | config | onedrive |
| Vitops+-S | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 75.8 | 82.6 | config | log | onedrive |
| Vitops+-B | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 77.0 | 82.6 | config | log | onedrive |
| vitops+-l | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 78.6 | 84.1 | config | log | onedrive |
| Vitops+-H | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 79.4 | 84.8 | config | log | onedrive |
Ochumanテストセットの結果
グラウンドトゥルース境界ボックスを使用します。ここの構成は評価のためだけです。
| モデル | データセット | 解決 | AP | ar | config | 重さ |
|---|---|---|---|---|---|---|
| vitose-b | coco+aic+mpii | 256x192 | 88.0 | 89.6 | config | onedrive |
| vitose-l | coco+aic+mpii | 256x192 | 90.9 | 92.2 | config | onedrive |
| vitose-h | coco+aic+mpii | 256x192 | 90.9 | 92.3 | config | onedrive |
| vitose-g | coco+aic+mpii | 576x432 | 93.3 | 94.3 | ||
| vitopse-b* | coco+aic+mpii+クラウド | 256x192 | 88.2 | 90.0 | config | onedrive |
| vitose-l* | coco+aic+mpii+クラウド | 256x192 | 91.5 | 92.8 | config | onedrive |
| vitose-h* | coco+aic+mpii+クラウド | 256x192 | 91.6 | 92.8 | config | onedrive |
| Vitops+-S | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 78.4 | 80.6 | config | log | onedrive |
| Vitops+-B | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 82.6 | 84.8 | config | log | onedrive |
| vitops+-l | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 85.7 | 87.5 | config | log | onedrive |
| Vitops+-H | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 85.7 | 87.4 | config | log | onedrive |
MPII VALセットの結果
グラウンドトゥルース境界ボックスを使用します。ここの構成は評価のためだけです。メトリックはPCKHです。
| モデル | データセット | 解決 | 平均 | config | 重さ |
|---|---|---|---|---|---|
| vitose-b | coco+aic+mpii | 256x192 | 93.3 | config | onedrive |
| vitose-l | coco+aic+mpii | 256x192 | 94.0 | config | onedrive |
| vitose-h | coco+aic+mpii | 256x192 | 94.1 | config | onedrive |
| vitose-g | coco+aic+mpii | 576x432 | 94.3 | ||
| vitopse-b* | coco+aic+mpii+クラウド | 256x192 | 93.4 | config | onedrive |
| vitose-l* | coco+aic+mpii+クラウド | 256x192 | 93.9 | config | onedrive |
| vitose-h* | coco+aic+mpii+クラウド | 256x192 | 94.1 | config | onedrive |
| Vitops+-S | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 92.7 | config | log | onedrive |
| Vitops+-B | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 92.8 | config | log | onedrive |
| vitops+-l | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 94.0 | config | log | onedrive |
| Vitops+-H | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 94.2 | config | log | onedrive |
AIチャレンジャーテストセットの結果
グラウンドトゥルース境界ボックスを使用します。ここの構成は評価のためだけです。
| モデル | データセット | 解決 | AP | ar | config | 重さ |
|---|---|---|---|---|---|---|
| vitose-b | coco+aic+mpii | 256x192 | 32.0 | 36.3 | config | onedrive |
| vitose-l | coco+aic+mpii | 256x192 | 34.5 | 39.0 | config | onedrive |
| vitose-h | coco+aic+mpii | 256x192 | 35.4 | 39.9 | config | onedrive |
| vitose-g | coco+aic+mpii | 576x432 | 43.2 | 47.1 | ||
| vitopse-b* | coco+aic+mpii+クラウド | 256x192 | 31.9 | 36.3 | config | onedrive |
| vitose-l* | coco+aic+mpii+クラウド | 256x192 | 34.6 | 39.0 | config | onedrive |
| vitose-h* | coco+aic+mpii+クラウド | 256x192 | 35.3 | 39.8 | config | onedrive |
| Vitops+-S | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 29.7 | 34.3 | config | log | onedrive |
| Vitops+-B | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 31.8 | 36.3 | config | log | onedrive |
| vitops+-l | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 34.3 | 38.9 | config | log | onedrive |
| Vitops+-H | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 34.8 | 39.1 | config | log | onedrive |
クラウドテストセットの結果
Yolov3ヒト検出器の使用。ここの構成は評価のためだけです。
| モデル | データセット | 解決 | AP | AP(H) | config | 重さ |
|---|---|---|---|---|---|---|
| vitopse-b* | coco+aic+mpii+クラウド | 256x192 | 74.7 | 63.3 | config | onedrive |
| vitose-l* | coco+aic+mpii+クラウド | 256x192 | 76.6 | 65.9 | config | onedrive |
| vitose-h* | coco+aic+mpii+クラウド | 256x192 | 76.3 | 65.6 | config | onedrive |
AP-10Kテストセットの結果
| モデル | データセット | 解決 | AP | config | 重さ |
|---|---|---|---|---|---|
| Vitops+-S | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 71.4 | config | log | onedrive |
| Vitops+-B | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 74.5 | config | log | onedrive |
| vitops+-l | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 80.4 | config | log | onedrive |
| Vitops+-H | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 82.4 | config | log | onedrive |
APT-36K VALセットの結果
| モデル | データセット | 解決 | AP | config | 重さ |
|---|---|---|---|---|---|
| Vitops+-S | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 74.2 | config | log | onedrive |
| Vitops+-B | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 75.9 | config | log | onedrive |
| vitops+-l | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 80.8 | config | log | onedrive |
| Vitops+-H | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 82.3 | config | log | onedrive |
| モデル | データセット | 解決 | AP | config | 重さ |
|---|---|---|---|---|---|
| Vitops+-S | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 54.4 | config | log | onedrive |
| Vitops+-B | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 57.4 | config | log | onedrive |
| vitops+-l | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 60.6 | config | log | onedrive |
| Vitops+-H | coco+aic+mpii+ap10k+apt36k+wholebody | 256x192 | 61.2 | config | log | onedrive |
| モデル | データセット | 解決 | auc | config | 重さ |
|---|---|---|---|---|---|
| Vitops+-S | coco+aic+mpii+wholebody | 256x192 | 86.5 | config | 近日公開 |
| Vitops+-B | coco+aic+mpii+wholebody | 256x192 | 87.0 | config | 近日公開 |
| vitops+-l | coco+aic+mpii+wholebody | 256x192 | 87.5 | config | 近日公開 |
| Vitops+-H | coco+aic+mpii+wholebody | 256x192 | 87.6 | config | 近日公開 |
[2023-01-10] Vitops+を更新してください! MOE Strategiesを使用して、人間、動物、および全体のボディが推定するタスクを共同で扱います。
[2022-05-24]シングルタスクトレーニングコード、シングルタスクの事前訓練モデル、およびマルチタスク前抑制モデルをアップロードします。
[2022-05-06]ベース、大規模、巨大なモデルのログをアップロードします!
[2022-04-27] Vitae-Gとのin vitsposeは、Coco Test-DEVセットで81.1 APを取得します!
Vitae Transformerのアプリケーションには以下が含まれます。画像分類|オブジェクトの検出|セマンティックセグメンテーション|動物のポーズセグメンテーション|リモートセンシング|マット| VSA | vitdet
実験には、Pytorch 1.9.0またはNGC Docker 21.06、およびMMCV 1.3.9を使用します。
git clone https://github.com/open-mmlab/mmcv.git
cd mmcv
git checkout v1.3.9
MMCV_WITH_OPS=1 pip install -e .
cd ..
git clone https://github.com/ViTAE-Transformer/ViTPose.git
cd ViTPose
pip install -v -e .2つのリポジトリをインストールした後、TIMMとEINOPS、IEをインストールします。
pip install timm==0.4.9 einops事前に保護されたモデルをダウンロードした後、実行して実験を実施してください
# for single machine
bash tools/dist_train.sh < Config PATH > < NUM GPUs > --cfg-options model.pretrained= < Pretrained PATH > --seed 0
# for multiple machines
python -m torch.distributed.launch --nnodes < Num Machines > --node_rank < Rank of Machine > --nproc_per_node < GPUs Per Machine > --master_addr < Master Addr > --master_port < Master Port > tools/train.py < Config PATH > --cfg-options model.pretrained= < Pretrained PATH > --launcher pytorch --seed 0事前に保護されたモデルのパフォーマンスをテストするには、実行してください
bash tools/dist_test.sh < Config PATH > < Checkpoint PATH > < NUM GPUs >Vitops+事前に訓練されたモデルについては、最初に事前に訓練されたウェイトを使用して再編成してください
python tools/model_split.py --source < Pretrained PATH > このレポ電流には、以下を含む変更が含まれています。
構成と前処理されたモデルをアップロードします
SOTAの結果を備えたモデルを増やします
マルチタスクトレーニング構成をアップロードします
MMPOSEとMAEからの優れた実装を認めます。
vitose用
@inproceedings{
xu2022vitpose,
title={Vi{TP}ose: Simple Vision Transformer Baselines for Human Pose Estimation},
author={Yufei Xu and Jing Zhang and Qiming Zhang and Dacheng Tao},
booktitle={Advances in Neural Information Processing Systems},
year={2022},
}
Vitops+の場合
@article{xu2022vitpose+,
title={ViTPose+: Vision Transformer Foundation Model for Generic Body Pose Estimation},
author={Xu, Yufei and Zhang, Jing and Zhang, Qiming and Tao, Dacheng},
journal={arXiv preprint arXiv:2212.04246},
year={2022}
}
VitaeとVitaev2については、次のことを参照してください。
@article{xu2021vitae,
title={Vitae: Vision transformer advanced by exploring intrinsic inductive bias},
author={Xu, Yufei and Zhang, Qiming and Zhang, Jing and Tao, Dacheng},
journal={Advances in Neural Information Processing Systems},
volume={34},
year={2021}
}
@article{zhang2022vitaev2,
title={ViTAEv2: Vision Transformer Advanced by Exploring Inductive Bias for Image Recognition and Beyond},
author={Zhang, Qiming and Xu, Yufei and Zhang, Jing and Tao, Dacheng},
journal={arXiv preprint arXiv:2202.10108},
year={2022}
}


