Yolov5 Deepsort
1.0.0
この記事のアドレス:https://blog.csdn.net/weixin_44936889/article/details/112002152
Yolov5+DeepSortを使用して、車両の歩行者の追跡とカウントを実装すると、コードが検出器クラスにカプセル化されており、独自のプロジェクトに埋め込むのが簡単です。
コードアドレス(スターウェルカム):
https://github.com/sharpiless/yolov5-deepsort/
最終的な効果: 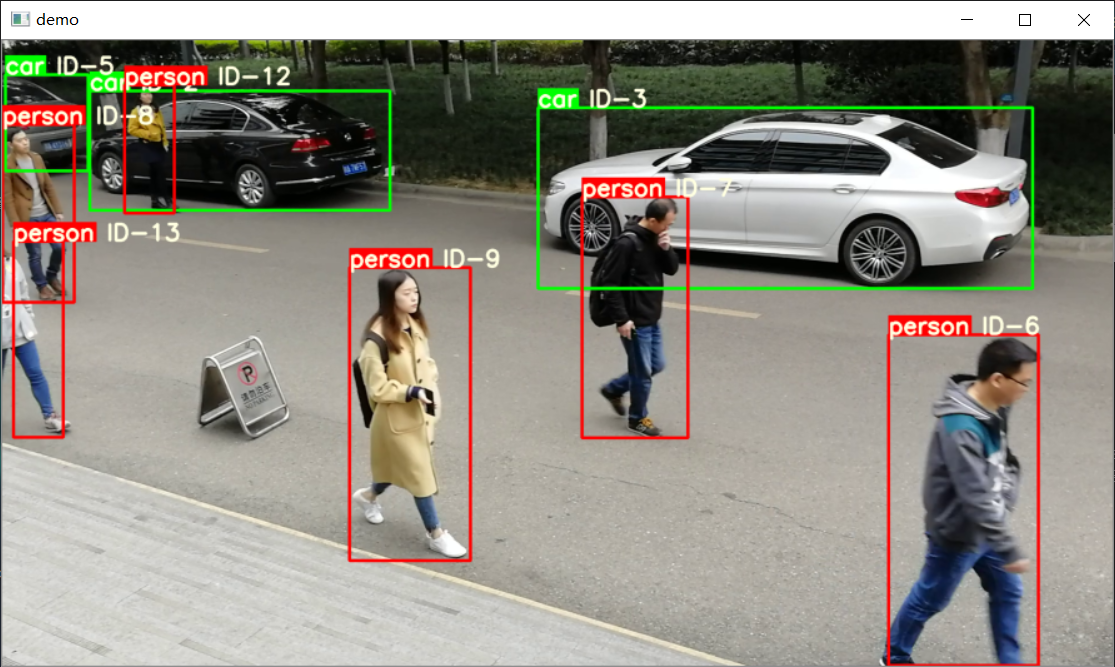
class Detector ( baseDet ):
def __init__ ( self ):
super ( Detector , self ). __init__ ()
self . init_model ()
self . build_config ()
def init_model ( self ):
self . weights = 'weights/yolov5m.pt'
self . device = '0' if torch . cuda . is_available () else 'cpu'
self . device = select_device ( self . device )
model = attempt_load ( self . weights , map_location = self . device )
model . to ( self . device ). eval ()
model . half ()
# torch.save(model, 'test.pt')
self . m = model
self . names = model . module . names if hasattr (
model , 'module' ) else model . names
def preprocess ( self , img ):
img0 = img . copy ()
img = letterbox ( img , new_shape = self . img_size )[ 0 ]
img = img [:, :, :: - 1 ]. transpose ( 2 , 0 , 1 )
img = np . ascontiguousarray ( img )
img = torch . from_numpy ( img ). to ( self . device )
img = img . half () # 半精度
img /= 255.0 # 图像归一化
if img . ndimension () == 3 :
img = img . unsqueeze ( 0 )
return img0 , img
def detect ( self , im ):
im0 , img = self . preprocess ( im )
pred = self . m ( img , augment = False )[ 0 ]
pred = pred . float ()
pred = non_max_suppression ( pred , self . threshold , 0.4 )
pred_boxes = []
for det in pred :
if det is not None and len ( det ):
det [:, : 4 ] = scale_coords (
img . shape [ 2 :], det [:, : 4 ], im0 . shape ). round ()
for * x , conf , cls_id in det :
lbl = self . names [ int ( cls_id )]
if not lbl in [ 'person' , 'car' , 'truck' ]:
continue
x1 , y1 = int ( x [ 0 ]), int ( x [ 1 ])
x2 , y2 = int ( x [ 2 ]), int ( x [ 3 ])
pred_boxes . append (
( x1 , y1 , x2 , y2 , lbl , conf ))
return im , pred_boxesself.tetectメソッドを呼び出して、画像と予測の結果を返す
deepsort = DeepSort ( cfg . DEEPSORT . REID_CKPT ,
max_dist = cfg . DEEPSORT . MAX_DIST , min_confidence = cfg . DEEPSORT . MIN_CONFIDENCE ,
nms_max_overlap = cfg . DEEPSORT . NMS_MAX_OVERLAP , max_iou_distance = cfg . DEEPSORT . MAX_IOU_DISTANCE ,
max_age = cfg . DEEPSORT . MAX_AGE , n_init = cfg . DEEPSORT . N_INIT , nn_budget = cfg . DEEPSORT . NN_BUDGET ,
use_cuda = True )self.updateメソッドを呼び出して、追跡結果を更新してください
python demo.py私の別のブログを参照してください:
[Xiaobai CV] Yolov5でステップバイステップで教えて、独自のデータセットをトレーニングします(Windows環境構成から展開をモデル化するまで)
トレーニング後、Weightsフォルダーに入れます
from AIDetector_pytorch import Detector
det = Detector () result = det . feedCap ( im )ここで、IMはBGR画像です
返された結果は辞書で、結果['frame']が視覚的な画像を返します
Bステーション:https://space.bilibili.com/470550823
CSDN:https://blog.csdn.net/weixin_44936889
AIスタジオ:https://aistudio.baidu.com/aistudio/personalcenter/thirdview/67156
Github:https://github.com/sharpiless
GNU General Public License v3.0 Protocolに従って、ターゲット検出のソースを示します。


