OpenPCDet
1.0.0

OpenPCDet adalah proyek open source yang jelas, sederhana, mandiri untuk deteksi objek 3D berbasis LIDAR.
Ini juga merupakan rilis kode resmi [PointRCNN] , [Part-A2-Net] , [PV-RCNN] , [Voxel R-CNN] , [PV-RCNN++] dan [MPPNet] .
Sorotan :
OpenPCDet telah diperbarui ke v0.6.0 (September 2022). [2023-06-30] BARU: Dukungan tambahan untuk DSVT , yang mencapai kinerja canggih pada dataset Waymo Open skala besar dengan kecepatan inferensi real-time (27Hz dengan Tensorrt).
[2023-05-13] Baru: Dukungan tambahan untuk model deteksi objek 3D multi-modal pada dataset nuscenes.
BEVFusion , yang memadukan informasi multi-modal tentang ruang BEV dan mencapai 70,98% NDS pada dataset validasi nuscenes. (Lihat pedoman tentang cara melatih/menguji dengan bevfusion). [2023-04-02] menambahkan dukungan untuk VoxelNeXt pada nuscenes, waymo, dan dataset Argoverse2. Ini adalah jaringan deteksi objek 3D yang sepenuhnya jarang, yang merupakan jaringan CNNs jarang yang bersih dan memprediksi objek 3D secara langsung pada voxel.
[2022-09-02] BARU: Perbarui OpenPCDet ke V0.6.0:
MPPNet untuk deteksi objek 3D temporal, yang mendukung deteksi objek 3D multi-frame jangka panjang dan menempati urutan pertama pada deteksi 3D learderboard dari dataset Waymo Open pada 2 September, 2022. Untuk dataset validasi, MPPNET mencapai 74,96%, 75,06% dan 74.52, 74.52, KEDUA KEDUA, MPPNET mencapai 74.96%, 74.06% dan 74.52, KEDURIAN, MPPNET, MPPNET mencapai 74.96%, 75.06% dan 74.52. (Lihat pedoman tentang cara melatih/menguji dengan MPPNet).--use_tqdm_to_record ). Silakan gunakan pip install gpustat jika Anda juga ingin mencatat informasi terkait GPU.[2022-08-22] Menambahkan dukungan untuk tutorial dan template dataset khusus
[2022-07-05] Menambahkan dukungan untuk Deteksi Objek 3D Focals Network Focals Conv .
[2022-02-12] Menambahkan dukungan untuk menggunakan Docker. Silakan merujuk ke panduan di ./docker.
[2022-02-07] Menambahkan dukungan untuk model CenterPoint pada dataset Nuscenes.
[2022-01-14] Menambahkan dukungan untuk voxelisasi pilar dinamis, mengikuti implementasi yang diusulkan dalam H^23D R-CNN dengan operasi unik dan paket torch_scatter .
[2022-01-05] BARU: Perbarui OpenPCDet ke V0.5.2:
PV-RCNN++ telah dirilis ke repo ini, dengan kinerja yang lebih tinggi, kecepatan pelatihan/inferensi lebih cepat dan lebih sedikit konsumsi memori daripada PV-RCNN. [2021-12-09] BARU: Perbarui OpenPCDet ke V0.5.1:
[2021-12-01] BARU: OpenPCDet V0.5.0 dirilis dengan fitur-fitur berikut:
CenterPoint dan PV-RCNN with CenterHead .USE_SHARED_MEMORY untuk menggunakan memori bersama untuk berpotensi mempercepat proses pelatihan jika Anda menderita masalah IO. [2021-06-08] Menambahkan dukungan untuk model deteksi objek 3D berbasis voxel Voxel R-CNN .
[2021-05-14] Menambahkan dukungan untuk model deteksi objek 3D monokular CaDDN .
[2020-11-27] BUGFIXED: Silakan persiapkan kembali info validasi Waymo Dataset (versi 1.2) jika Anda ingin menggunakan alat evaluasi WayMo yang disediakan (lihat PR). Perhatikan bahwa Anda tidak perlu mendapatkan persiapan ulang data pelatihan dan database darat.
[2020-11-10] Waymo Open Dataset telah didukung dengan hasil canggih. Saat ini kami menyediakan konfigurasi dan hasil dari SECOND , PartA2 dan PV-RCNN di Waymo Open Dataset, dan lebih banyak model dapat dengan mudah didukung dengan memodifikasi konfigurasi dataset mereka.
[2020-08-10] BUGFIXED: Model Nuscenes yang disediakan telah diperbarui untuk memperbaiki bug pemuatan. Harap redownload jika Anda perlu menggunakan model nuscenes pretrained.
[2020-07-30] OpenPCDet V0.3.0 dirilis dengan fitur-fitur berikut:
PointRCNN , PartA2-Free ) didukung sekarang.SECOND-MultiHead (CBGS) dan PointPillar-MultiHead ).[2020-07-17] Tambahkan kode visualisasi sederhana dan demo cepat untuk diuji dengan data khusus.
[2020-06-24] OpenPCDet V0.2.0 dirilis dengan struktur yang cukup baru untuk mendukung lebih banyak model dan set data.
[2020-03-16] OpenPCDet V0.1.0 dirilis.
OpenPCDet Toolbox? Perhatikan bahwa kami telah meningkatkan PCDet dari v0.1 ke v0.2 dengan struktur yang cukup baru untuk mendukung berbagai set data dan model.
OpenPCDet adalah basis kode berbasis Pytorch umum untuk deteksi objek 3D dari titik cloud. Saat ini mendukung beberapa metode deteksi objek 3D canggih dengan kode yang sangat refactored untuk kerangka deteksi 3D satu tahap dan dua tahap.
Berdasarkan OpenPCDet Toolbox, kami memenangkan Waymo Open Dataset Challenge dalam deteksi 3D, pelacakan 3D, adaptasi domain tiga trek di antara semua metode lidar saja, dan model terkait Waymo akan segera dirilis ke OpenPCDet .
Kami secara aktif memperbarui repo ini saat ini, dan lebih banyak kumpulan data dan model akan segera didukung. Kontribusi juga disambut.
OpenPCDet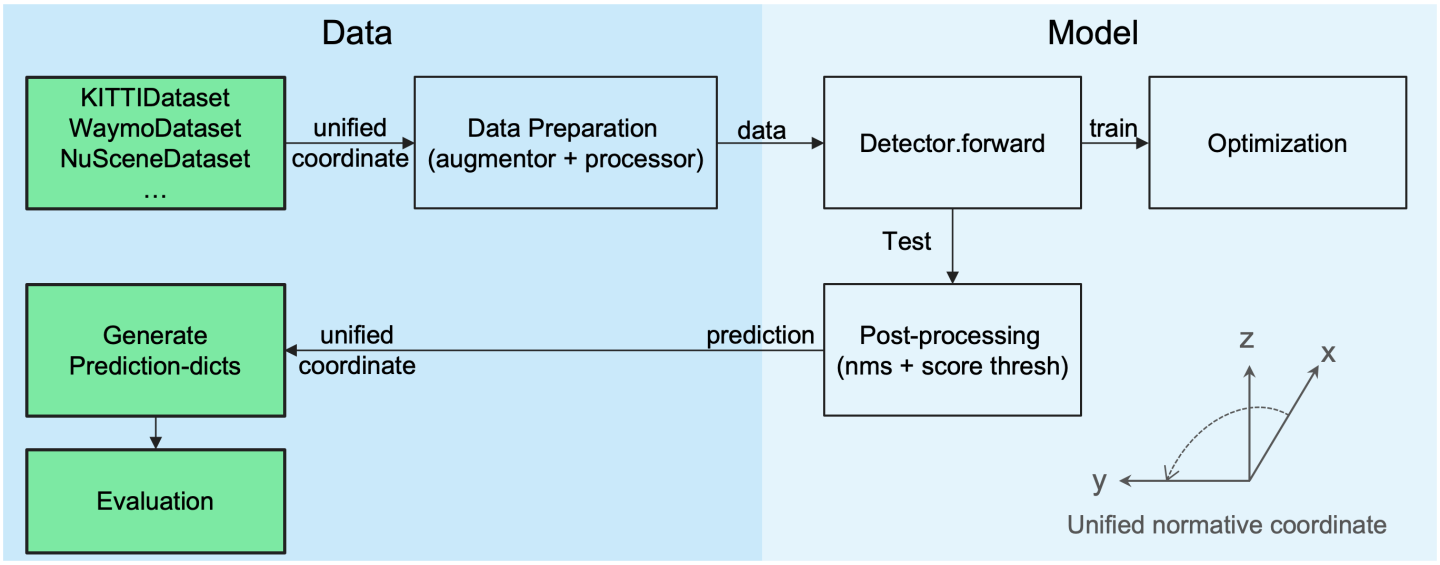
Definisi kotak 3D terpadu: (x, y, z, dx, dy, dz, heading).
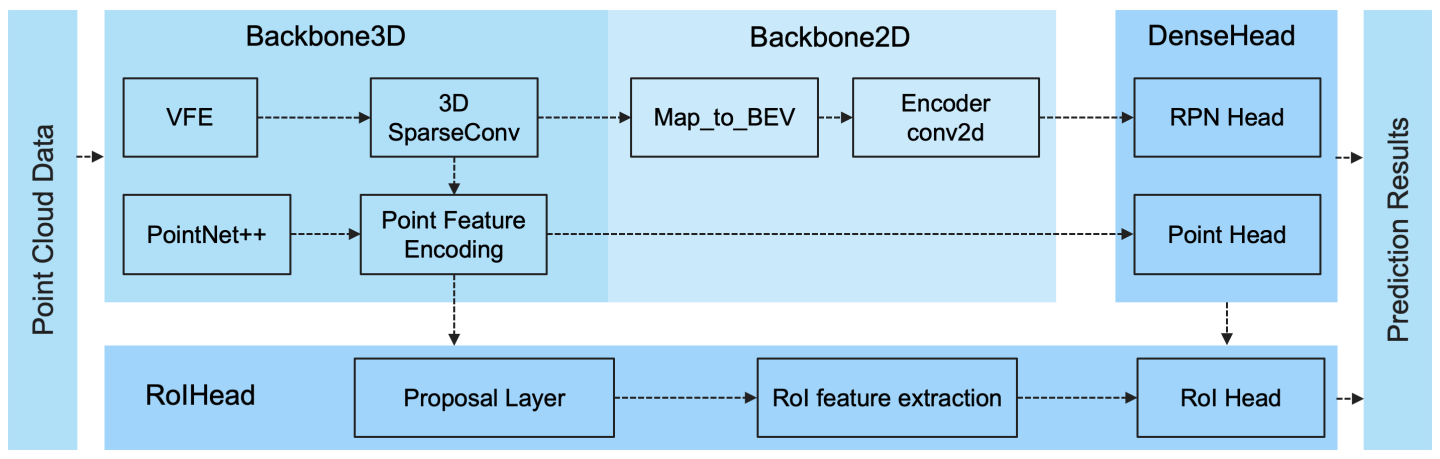
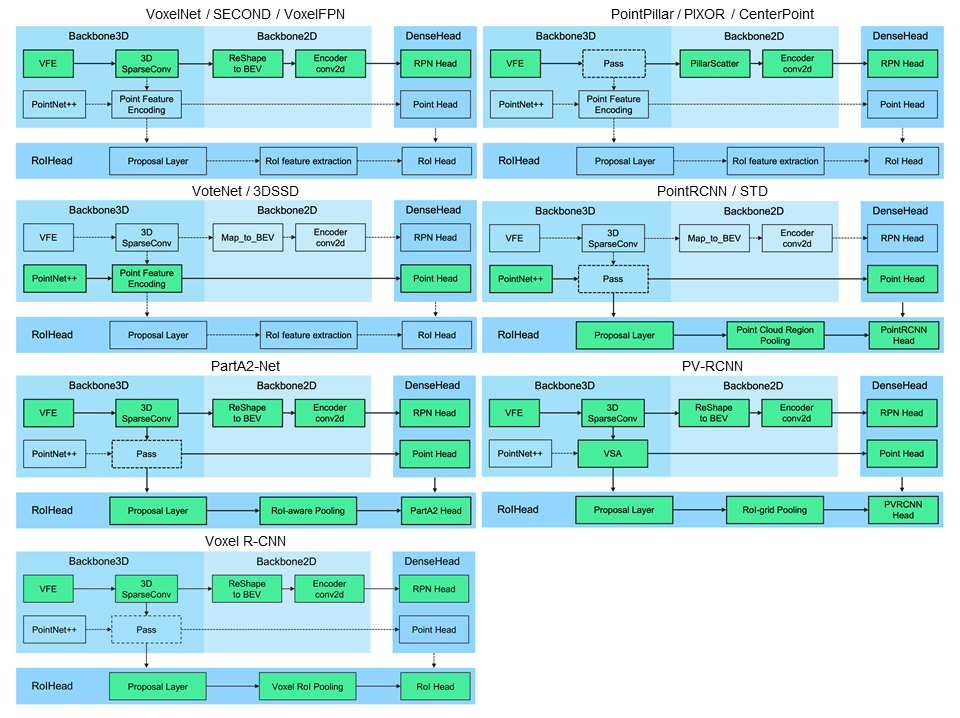
Struktur model yang fleksibel dan jelas untuk dengan mudah mendukung berbagai model deteksi 3D:
Metode yang didukung yang dipilih ditunjukkan pada tabel di bawah ini. Hasilnya adalah kinerja deteksi 3D dari kesulitan moderat pada set Val dari kitti dataset.
| waktu pelatihan | Mobil@R11 | Pedestrian@R11 | Pengendara sepeda@r11 | unduh | |
|---|---|---|---|---|---|
| Pointpillar | ~ 1,2 jam | 77.28 | 52.29 | 62.68 | Model-18m |
| KEDUA | ~ 1,7 jam | 78.62 | 52.98 | 67.15 | model-20m |
| Kedua-iou | - | 79.09 | 55.74 | 71.31 | Model-46m |
| Pointrcnn | ~ 3 jam | 78.70 | 54.41 | 72.11 | model-16m |
| Pointrcnn-iou | ~ 3 jam | 78.75 | 58.32 | 71.34 | model-16m |
| Bagian-A2-bebas | ~ 3,8 jam | 78.72 | 65.99 | 74.29 | model-226m |
| Bagian-A2-jangkar | ~ 4,3 jam | 79.40 | 60.05 | 69.90 | model-244m |
| PV-RCNN | ~ 5 jam | 83.61 | 57.90 | 70.47 | model-50m |
| Voxel R-CNN (Mobil) | ~ 2,2 jam | 84.54 | - | - | model-28m |
| Focals Conv - f | ~ 4 jam | 85.66 | - | - | Model-30m |
| Caddn (mono) | ~ 15 jam | 21.38 | 13.02 | 9.76 | Model-774m |
Kami menyediakan pengaturan DATA_CONFIG.SAMPLED_INTERVAL di Waymo Open Dataset (WOD) untuk sampel parsial subsampel untuk pelatihan dan evaluasi, sehingga Anda juga dapat bermain dengan WOD dengan mengatur DATA_CONFIG.SAMPLED_INTERVAL yang lebih kecil_config.sampled_interval bahkan jika Anda hanya memiliki sumber daya GPU terbatas.
Secara default, semua model dilatih dengan satu bingkai data 20% (~ 32K frame) dari semua sampel pelatihan pada 8 GTX 1080TI GPU, dan hasil masing -masing sel di sini adalah MAP/MAPH yang dihitung oleh metrik evaluasi Waymo resmi pada seluruh set validasi (versi 1.2).
| Kinerja@(Latih dengan data 20%) | Vec_l1 | VEC_L2 | PED_L1 | PED_L2 | Cyc_l1 | Cyc_l2 |
|---|---|---|---|---|---|---|
| KEDUA | 70.96/70.34 | 62.58/62.02 | 65.23/54.24 | 57.22/47.49 | 57.13/55.62 | 54.97/53.53 |
| Pointpillar | 70.43/69.83 | 62.18/61.64 | 66.21/46.32 | 58.18/40.64 | 55.26/51.75 | 53.18/49.80 |
| Pilar CenterPoint | 70.50/69.96 | 62.18/61.69 | 73.11/61.97 | 65.06/55.00 | 65.44/63.85 | 62.98/61.46 |
| CenterPoint-Dynamic-Pillar | 70.46/69.93 | 62.06/61.58 | 73.92/63.35 | 65.91/56.33 | 66.24/64.69 | 63.73/62.24 |
| Centerpoint | 71.33/70.76 | 63.16/62.65 | 72.09/65.49 | 64.27/58.23 | 68.68/67.39 | 66.11/64.87 |
| CenterPoint (ResNet) | 72.76/72.23 | 64.91/64.42 | 74.19/67.96 | 66.03/60.34 | 71.04/69.79 | 68.49/67.28 |
| Bagian-A2-jangkar | 74.66/74.12 | 65.82/65.32 | 71.71/62.24 | 62.46/54.06 | 66.53/65.18 | 64.05/62.75 |
| PV-RCNN (Anchorhead) | 75.41/74.74 | 67.44/66.80 | 71.98/61.24 | 63.70/53.95 | 65.88/64.25 | 63.39/61.82 |
| PV-RCNN (Centerhead) | 75.95/75.43 | 68.02/67.54 | 75.94/69.40 | 67.66/61.62 | 70.18/68.98 | 67.73/66.57 |
| Voxel R-CNN (Centerhead) -Dynamic-Voxel | 76.13/75.66 | 68.18/67.74 | 78.20/71.98 | 69.29/63.59 | 70.75/69.68 | 68.25/67.21 |
| PV-RCNN ++ | 77.82/77.32 | 69.07/68.62 | 77.99/71.36 | 69.92/63.74 | 71.80/70.71 | 69.31/68.26 |
| PV-RCNN ++ (ResNet) | 77.61/77.14 | 69.18/68.75 | 79.42/73.31 | 70.88/65.21 | 72.50/71.39 | 69.84/68.77 |
Di sini kami juga memberikan kinerja beberapa model yang dilatih pada set pelatihan lengkap (lihat kertas PV-RCNN ++):
| Kinerja@(Latih dengan data 100%) | Vec_l1 | VEC_L2 | PED_L1 | PED_L2 | Cyc_l1 | Cyc_l2 |
|---|---|---|---|---|---|---|
| KEDUA | 72.27/71.69 | 63.85/63.33 | 68.70/58.18 | 60.72/51.31 | 60.62/59.28 | 58.34/57.05 |
| Pilar CenterPoint | 73.37/72.86 | 65.09/64.62 | 75.35/65.11 | 67.61/58.25 | 67.76/66.22 | 65.25/63.77 |
| Bagian-A2-jangkar | 77.05/76.51 | 68.47/67.97 | 75.24/66.87 | 66.18/58.62 | 68.60/67.36 | 66.13/64.93 |
| VoxelNext-2D | 77.94/77.47 | 69.68/69.25 | 80.24/73.47 | 72.23/65.88 | 73.33/72.20 | 70.66/69.56 |
| VoxelNext | 78.16/77.70 | 69.86/69.42 | 81.47/76.30 | 73.48/68.63 | 76.06/74.90 | 73.29/72.18 |
| PV-RCNN (Centerhead) | 78.00/77.50 | 69.43/68.98 | 79.21/73.03 | 70.42/64.72 | 71.46/70.27 | 68.95/67.79 |
| PV-RCNN ++ | 79.10/78.63 | 70.34/69.91 | 80.62/74.62 | 71.86/66.30 | 73.49/72.38 | 70.70/69.62 |
| PV-RCNN ++ (ResNet) | 79.25/78.78 | 70.61/70.18 | 81.83/76.28 | 73.17/68.00 | 73.72/72.66 | 71.21/70.19 |
| DSVT-PILLAR | 79.44/78.97 | 71.24/70.81 | 83.00/77.22 | 75.45/69.95 | 76.70/75.70 | 73.83/72.86 |
| DSVT-VOXEL | 79.77/79.31 | 71.67/71.25 | 83.75/78.92 | 76.21/71.57 | 77.57/76.58 | 74.70/73.73 |
| PV-RCNN ++ (resnet, 2 frame) | 80.17/79.70 | 72.14/71.70 | 83.48/80.42 | 75.54/72.61 | 74.63/73.75 | 72.35/71.50 |
| MPPNET (4 frame) | 81.54/81.06 | 74.07/73.61 | 84.56/81.94 | 77.20/74.67 | 77.15/76.50 | 75.01/74.38 |
| MPPNET (16 frame) | 82.74/82.28 | 75.41/74.96 | 84.69/82.25 | 77.43/75.06 | 77.28/76.66 | 75.13/74.52 |
Kami tidak dapat memberikan model pretrained di atas karena perjanjian lisensi Waymo Dataset, tetapi Anda dapat dengan mudah mencapai kinerja yang sama dengan pelatihan dengan konfigurasi default.
Semua model dilatih dengan 8 GPU dan tersedia untuk diunduh. Untuk pelatihan bevfusion, silakan merujuk ke pedoman ini.
| pasangan | mase | Maoe | Mave | maae | peta | Nds | unduh | |
|---|---|---|---|---|---|---|---|---|
| Pointpillar-Multihead | 33.87 | 26.00 | 32.07 | 28.74 | 20.15 | 44.63 | 58.23 | model-23m |
| Multihead Kedua (CBGS) | 31.15 | 25.51 | 26.64 | 26.26 | 20.46 | 50.59 | 62.29 | Model-35m |
| Centerpoint-pointpillar | 31.13 | 26.04 | 42.92 | 23.90 | 19.14 | 50.03 | 60.70 | model-23m |
| Centerpoint (voxel_size = 0,1) | 30.11 | 25.55 | 38.28 | 21.94 | 18.87 | 56.03 | 64.54 | Model-34m |
| CenterPoint (voxel_size = 0,075) | 28.80 | 25.43 | 37.27 | 21.55 | 18.24 | 59.22 | 66.48 | Model-34m |
| VoxelNext (voxel_size = 0,075) | 30.11 | 25.23 | 40.57 | 21.69 | 18.56 | 60.53 | 66.65 | Model-31m |
| Transfusi-L* | 27.96 | 25.37 | 29.35 | 27.31 | 18.55 | 64.58 | 69.43 | Model-32m |
| Bevfusion | 28.03 | 25.43 | 30.19 | 26.76 | 18.48 | 67.75 | 70.98 | Model-157m |
*: Gunakan strategi fade, yang menonaktifkan augmentasi data di beberapa zaman terakhir selama pelatihan.
Semua model dilatih dengan 8 GPU.
| Kendaraan | Pejalan kaki | Pengendara sepeda | peta | |
|---|---|---|---|---|
| Pointrcnn | 52.09 | 4.28 | 29.84 | 28.74 |
| Pointpillar | 68.57 | 17.63 | 46.81 | 44.34 |
| KEDUA | 71.19 | 26.44 | 58.04 | 51.89 |
| PV-RCNN | 77.77 | 23.50 | 59.37 | 53.55 |
| Centerpoint | 78.02 | 49.74 | 67.22 | 64.99 |
Semua model dilatih dengan 4 GPU.
| peta | unduh | |
|---|---|---|
| VoxelNext | 30.5 | Model-32m |
Selamat datang untuk mendukung dataset lain dengan mengirimkan permintaan tarik.
Silakan merujuk ke Install.md untuk pemasangan OpenPCDet .
Silakan merujuk ke demo.md untuk demo cepat untuk diuji dengan model pretrained dan memvisualisasikan hasil yang diprediksi pada data khusus Anda atau data kitti asli.
Silakan merujuk ke Geting_Started.md untuk mempelajari lebih lanjut penggunaan tentang proyek ini.
OpenPCDet dirilis di bawah lisensi Apache 2.0.
OpenPCDet adalah proyek open source untuk persepsi adegan 3D berbasis LIDAR yang mendukung beberapa model persepsi berbasis lidar seperti yang ditunjukkan di atas. Beberapa bagian PCDet dipelajari dari kode resmi yang dirilis dari metode yang didukung di atas. Kami ingin mengucapkan terima kasih atas metode yang diusulkan dan implementasi resmi.
Kami berharap repo ini dapat berfungsi sebagai basis kode yang kuat dan fleksibel untuk memberi manfaat bagi komunitas penelitian dengan mempercepat proses penerimaan ulang karya -karya sebelumnya dan/atau mengembangkan metode baru.
Jika Anda menemukan proyek ini berguna dalam penelitian Anda, silakan pertimbangkan CITE:
@misc{openpcdet2020,
title={OpenPCDet: An Open-source Toolbox for 3D Object Detection from Point Clouds},
author={OpenPCDet Development Team},
howpublished = {url{https://github.com/open-mmlab/OpenPCDet}},
year={2020}
}
Selamat datang untuk menjadi anggota tim pengembangan OpenPCDET dengan berkontribusi pada repo ini, dan jangan ragu untuk menghubungi kami untuk setiap kontribusi potensial.


