pypose
v0.6.9

Le Deep Learning a connu un succès remarquable dans la perception robotique, mais sa nature centrée sur les données souffre lorsqu'il s'agit de généraliser à des environnements en constante évolution. En revanche, l'optimisation basée sur la physique se généralise mieux, mais elle ne fonctionne pas aussi bien dans des tâches compliquées en raison du manque d'informations sémantiques de haut niveau et de la dépendance au réglage paramétrique manuel. Pour profiter de ces deux mondes complémentaires, nous présentons Pypose: une bibliothèque basée sur la robotique et basée sur Pytorch qui combine des modèles perceptuels profonds avec des techniques d'optimisation basées sur la physique . Notre objectif de conception pour Pypose est de le rendre convivial , efficace et interprétable avec une architecture bien rangée et bien organisée. En utilisant une interface de style impérative , il peut être facilement intégré dans des applications robotiques réelles .
SO3 , SE3 , Sim3 , RxSO3so3 , se3 , sim3 , rxso3 LTI , LTV , NLSEKF , UKF , PFEPnPLQRIMUPreintegratorGaussNewtonLevenbergMarquardtVous voulez plus de fonctionnalités? Créez un problème ici pour demander de nouvelles fonctionnalités.
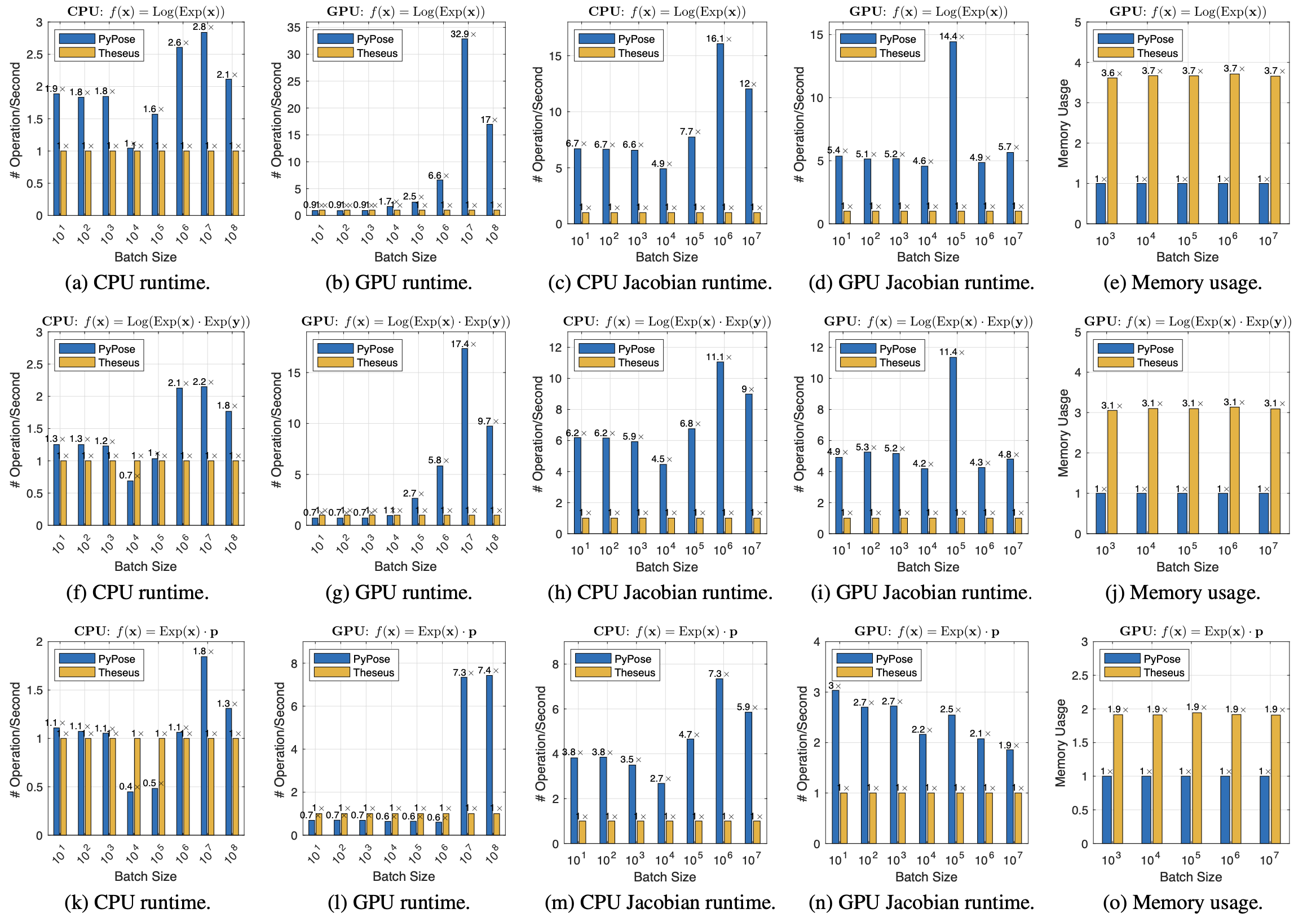
Efficacité et comparaison de la mémoire des opérations de groupe de mensonges lots (nous prenons les performances de cesUS comme 1 ×).
Plus d'informations sur la comparaison de l'efficacité reviennent à notre article pour Pypose.
pip install pyposeSur Ubuntu, MacOS ou Windows, installez Pytorch, puis exécutez:
pip install -r requirements/runtime.txtgit clone https://github.com/pypose/pypose.git
cd pypose && python setup.py developpytestAssurez-vous que l'installation ci-dessus est correcte.
Aller à contribution.md
> >> import torch , pypose as pp
> >> # A random so(3) LieTensor
>> > r = pp . randn_so3 ( 2 , requires_grad = True )
so3Type LieTensor :
tensor ([[ 0.1606 , 0.0232 , - 1.5516 ],
[ - 0.0807 , - 0.7184 , - 0.1102 ]], requires_grad = True )
> >> R = r . Exp () # Equivalent to: R = pp.Exp(r)
SO3Type LieTensor :
tensor ([[ 0.0724 , 0.0104 , - 0.6995 , 0.7109 ],
[ - 0.0395 , - 0.3513 , - 0.0539 , 0.9339 ]], grad_fn = < AliasBackward0 > )
>> > p = R @ torch . randn ( 3 ) # Rotate random point
tensor ([[ 0.8045 , - 0.8555 , 0.5260 ],
[ 0.3502 , 0.8337 , 0.9154 ]], grad_fn = < ViewBackward0 > )
>> > p . sum (). backward () # Compute gradient
>> > r . grad # Print gradient
tensor ([[ - 0.7920 , - 0.9510 , 1.7110 ],
[ - 0.2659 , 0.5709 , - 0.3855 ]])scheduler sont fournies, chacune pouvant fonctionner de manière indépendante. > >> from torch import nn
> >> import torch , pypose as pp
> >> from pypose . optim import LM
> >> from pypose . optim . strategy import Constant
> >> from pypose . optim . scheduler import StopOnPlateau
> >> class InvNet ( nn . Module ):
def __init__ ( self , * dim ):
super (). __init__ ()
init = pp . randn_SE3 ( * dim )
self . pose = pp . Parameter ( init )
def forward ( self , input ):
error = ( self . pose @ input ). Log ()
return error . tensor ()
> >> device = torch . device ( "cuda" )
> >> input = pp . randn_SE3 ( 2 , 2 , device = device )
> >> invnet = InvNet ( 2 , 2 ). to ( device )
> >> strategy = Constant ( damping = 1e-4 )
> >> optimizer = LM ( invnet , strategy = strategy )
> >> scheduler = StopOnPlateau ( optimizer , steps = 10 , patience = 3 , decreasing = 1e-3 , verbose = True )
> >> # 1st option, full optimization
>> > scheduler . optimize ( input = input )
> >> # 2nd option, step optimization
>> > while scheduler . continual ():
loss = optimizer . step ( input )
scheduler . step ( loss )
> >> # Note: remove one of the above options for usage!Pour plus d'utilisation, voir la documentation. Pour plus d'applications, voir des exemples.
Si vous utilisez Pypose, veuillez citer le papier ci-dessous. Vous pouvez également le télécharger ici.
@inproceedings { wang2023pypose ,
title = { {PyPose}: A Library for Robot Learning with Physics-based Optimization } ,
author = { Wang, Chen and Gao, Dasong and Xu, Kuan and Geng, Junyi and Hu, Yaoyu and Qiu, Yuheng and Li, Bowen and Yang, Fan and Moon, Brady and Pandey, Abhinav and Aryan and Xu, Jiahe and Wu, Tianhao and He, Haonan and Huang, Daning and Ren, Zhongqiang and Zhao, Shibo and Fu, Taimeng and Reddy, Pranay and Lin, Xiao and Wang, Wenshan and Shi, Jingnan and Talak, Rajat and Cao, Kun and Du, Yi and Wang, Han and Yu, Huai and Wang, Shanzhao and Chen, Siyu and Kashyap, Ananth and Bandaru, Rohan and Dantu, Karthik and Wu, Jiajun and Xie, Lihua and Carlone, Luca and Hutter, Marco and Scherer, Sebastian } ,
booktitle = { IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) } ,
year = { 2023 }
}Plus d'articles décrivant Pypose:
@inproceedings { zhan2023pypose ,
title = { {PyPose} v0.6: The Imperative Programming Interface for Robotics } ,
author = { Zitong Zhan and Xiangfu Li and Qihang Li and Haonan He and Abhinav Pandey and Haitao Xiao and Yangmengfei Xu and Xiangyu Chen and Kuan Xu and Kun Cao and Zhipeng Zhao and Zihan Wang and Huan Xu and Zihang Fang and Yutian Chen and Wentao Wang and Xu Fang and Yi Du and Tianhao Wu and Xiao Lin and Yuheng Qiu and Fan Yang and Jingnan Shi and Shaoshu Su and Yiren Lu and Taimeng Fu and Karthik Dantu and Jiajun Wu and Lihua Xie and Marco Hutter and Luca Carlone and Sebastian Scherer and Daning Huang and Yaoyu Hu and Junyi Geng and Chen Wang } ,
year = { 2023 } ,
booktitle = { IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Workshop } ,
}

