pypose
v0.6.9

حقق التعلم العميق نجاحًا ملحوظًا في الإدراك الآلي ، لكن طبيعةها التي تركز على البيانات تعاني عندما يتعلق الأمر بالتعميم على البيئات المتغيرة باستمرار. على النقيض من ذلك ، يعتمد التحسين القائم على الفيزياء بشكل أفضل ، لكنه لا يؤدي أيضًا في المهام المعقدة بسبب عدم وجود معلومات دلالية عالية المستوى والاعتماد على ضبط حدودي يدوي. للاستفادة من هذين العالمين التكميليين ، نقدم Pypose: مكتبة موجهة نحو الروبوتات ، والتي تستند إلى Pytorch والتي تجمع بين النماذج الحسية العميقة مع تقنيات التحسين القائمة على الفيزياء . هدف التصميم الخاص بنا لـ Pypose هو جعلها سهلة الاستخدام وفعالة وقابلة للتفسير مع بنية مرتبة ومنظمة جيدًا. باستخدام واجهة نمط ضرورية ، يمكن دمجها بسهولة في تطبيقات روبوتية في العالم الحقيقي .
SO3 ، SE3 ، Sim3 ، RxSO3so3 ، se3 ، sim3 ، rxso3 LTI ، LTV ، NLSEKF ، UKF ، PFEPnPLQRIMUPreintegratorGaussNewtonLevenbergMarquardtتريد المزيد من الميزات؟ قم بإنشاء مشكلة هنا لطلب ميزات جديدة.
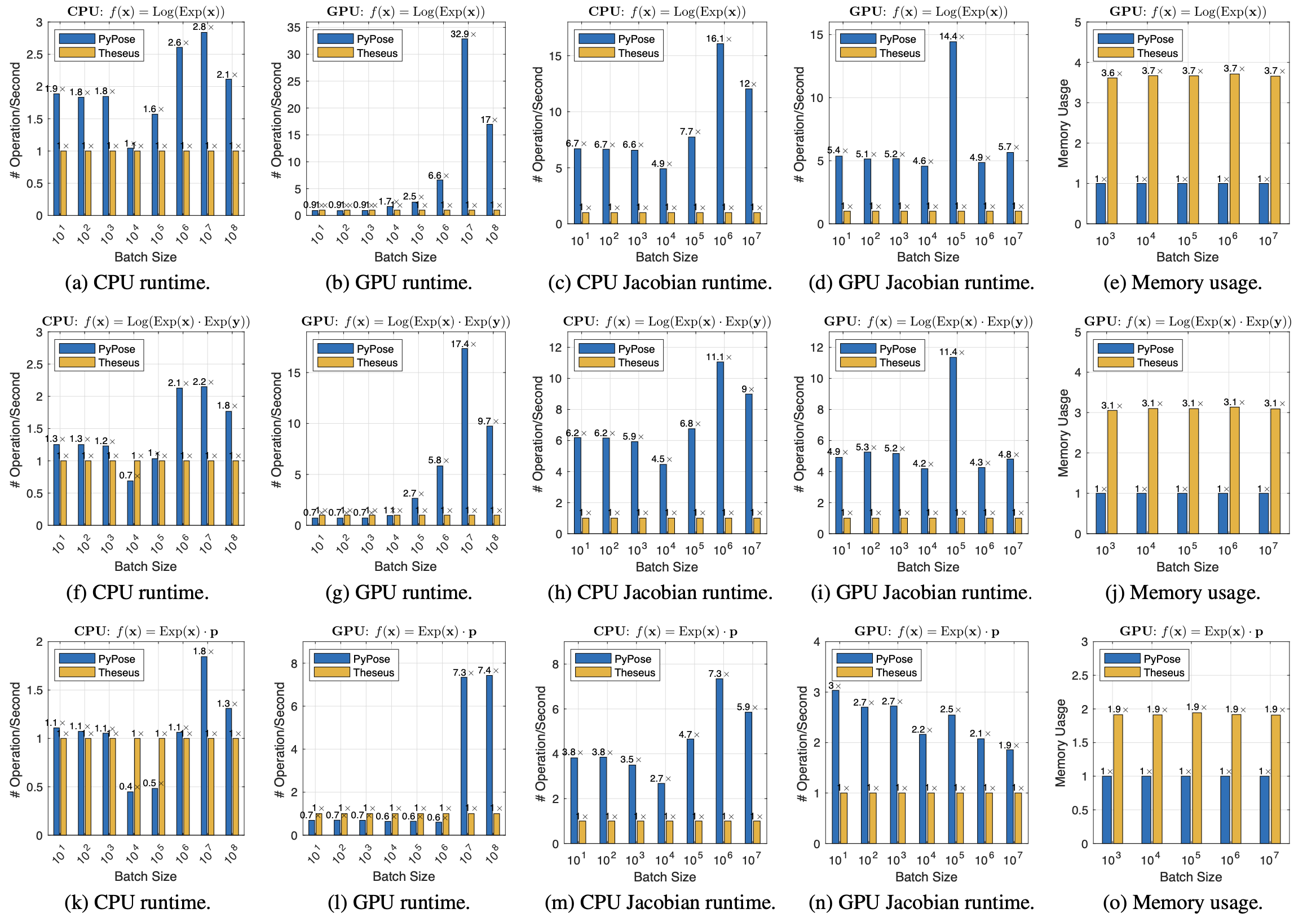
الكفاءة ومقارنة الذاكرة لعمليات مجموعة الكذب المزدوجة (نأخذ أداء ثيسيوس كـ 1 ×).
مزيد من المعلومات حول مقارنة الكفاءة يذهب إلى ورقنا ل pypose.
pip install pyposeعلى Ubuntu أو MacOS أو Windows ، قم بتثبيت Pytorch ، ثم قم بتشغيله:
pip install -r requirements/runtime.txtgit clone https://github.com/pypose/pypose.git
cd pypose && python setup.py developpytestتأكد من أن التثبيت أعلاه صحيح.
الذهاب إلى المساهمة
> >> import torch , pypose as pp
> >> # A random so(3) LieTensor
>> > r = pp . randn_so3 ( 2 , requires_grad = True )
so3Type LieTensor :
tensor ([[ 0.1606 , 0.0232 , - 1.5516 ],
[ - 0.0807 , - 0.7184 , - 0.1102 ]], requires_grad = True )
> >> R = r . Exp () # Equivalent to: R = pp.Exp(r)
SO3Type LieTensor :
tensor ([[ 0.0724 , 0.0104 , - 0.6995 , 0.7109 ],
[ - 0.0395 , - 0.3513 , - 0.0539 , 0.9339 ]], grad_fn = < AliasBackward0 > )
>> > p = R @ torch . randn ( 3 ) # Rotate random point
tensor ([[ 0.8045 , - 0.8555 , 0.5260 ],
[ 0.3502 , 0.8337 , 0.9154 ]], grad_fn = < ViewBackward0 > )
>> > p . sum (). backward () # Compute gradient
>> > r . grad # Print gradient
tensor ([[ - 0.7920 , - 0.9510 , 1.7110 ],
[ - 0.2659 , 0.5709 , - 0.3855 ]])scheduler ، يمكن لكل منهما العمل بشكل مستقل. > >> from torch import nn
> >> import torch , pypose as pp
> >> from pypose . optim import LM
> >> from pypose . optim . strategy import Constant
> >> from pypose . optim . scheduler import StopOnPlateau
> >> class InvNet ( nn . Module ):
def __init__ ( self , * dim ):
super (). __init__ ()
init = pp . randn_SE3 ( * dim )
self . pose = pp . Parameter ( init )
def forward ( self , input ):
error = ( self . pose @ input ). Log ()
return error . tensor ()
> >> device = torch . device ( "cuda" )
> >> input = pp . randn_SE3 ( 2 , 2 , device = device )
> >> invnet = InvNet ( 2 , 2 ). to ( device )
> >> strategy = Constant ( damping = 1e-4 )
> >> optimizer = LM ( invnet , strategy = strategy )
> >> scheduler = StopOnPlateau ( optimizer , steps = 10 , patience = 3 , decreasing = 1e-3 , verbose = True )
> >> # 1st option, full optimization
>> > scheduler . optimize ( input = input )
> >> # 2nd option, step optimization
>> > while scheduler . continual ():
loss = optimizer . step ( input )
scheduler . step ( loss )
> >> # Note: remove one of the above options for usage!لمزيد من الاستخدام ، انظر الوثائق. لمزيد من التطبيقات ، انظر الأمثلة.
إذا كنت تستخدم Pypose ، فيرجى الاستشهاد بالورقة أدناه. يمكنك أيضًا تنزيله هنا.
@inproceedings { wang2023pypose ,
title = { {PyPose}: A Library for Robot Learning with Physics-based Optimization } ,
author = { Wang, Chen and Gao, Dasong and Xu, Kuan and Geng, Junyi and Hu, Yaoyu and Qiu, Yuheng and Li, Bowen and Yang, Fan and Moon, Brady and Pandey, Abhinav and Aryan and Xu, Jiahe and Wu, Tianhao and He, Haonan and Huang, Daning and Ren, Zhongqiang and Zhao, Shibo and Fu, Taimeng and Reddy, Pranay and Lin, Xiao and Wang, Wenshan and Shi, Jingnan and Talak, Rajat and Cao, Kun and Du, Yi and Wang, Han and Yu, Huai and Wang, Shanzhao and Chen, Siyu and Kashyap, Ananth and Bandaru, Rohan and Dantu, Karthik and Wu, Jiajun and Xie, Lihua and Carlone, Luca and Hutter, Marco and Scherer, Sebastian } ,
booktitle = { IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) } ,
year = { 2023 }
}المزيد من الأوراق التي تصف Pypose:
@inproceedings { zhan2023pypose ,
title = { {PyPose} v0.6: The Imperative Programming Interface for Robotics } ,
author = { Zitong Zhan and Xiangfu Li and Qihang Li and Haonan He and Abhinav Pandey and Haitao Xiao and Yangmengfei Xu and Xiangyu Chen and Kuan Xu and Kun Cao and Zhipeng Zhao and Zihan Wang and Huan Xu and Zihang Fang and Yutian Chen and Wentao Wang and Xu Fang and Yi Du and Tianhao Wu and Xiao Lin and Yuheng Qiu and Fan Yang and Jingnan Shi and Shaoshu Su and Yiren Lu and Taimeng Fu and Karthik Dantu and Jiajun Wu and Lihua Xie and Marco Hutter and Luca Carlone and Sebastian Scherer and Daning Huang and Yaoyu Hu and Junyi Geng and Chen Wang } ,
year = { 2023 } ,
booktitle = { IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Workshop } ,
}

