TeleVision
1.0.0
ردود فعل مرئية نشطة غامرة
Xuxin Cheng* · Jialong li* · Shiqi Yang
GE Yang · Xiaolong Wang



يحتوي هذا الرمز على تنفيذ عن بُعد وتعلم التقليد من television المفتوح.
conda create -n tv python=3.8
conda activate tv
pip install -r requirements.txt
cd act/detr && pip install -e .تثبيت Zed SDK: https://www.stereolabs.com/developers/release/
تثبيت Zed Python API:
cd /usr/local/zed/ && python get_python_api.py
إذا كنت ترغب في تجربة مثال Teleoperation في بيئة محاكاة (Teleop_hand.py):
تثبيت Isaac Gym: https://developer.nvidia.com/isaac-gym/
للحصول على البث المحلي ، اتبع هذه المشكلة.
لا تسمح Apple WebXR على اتصالات غير HTTPS. لاختبار التطبيق محليًا ، نحتاج إلى إنشاء شهادة موقعة ذاتيا وتثبيتها على العميل. تحتاج إلى آلة Ubuntu وموجه. قم بتوصيل جهاز VisionPro وآلة Ubuntu بنفس جهاز التوجيه.
ifconfig | grep inet
لنفترض أن عنوان IP المحلي لجهاز Ubuntu هو 192.168.8.102 .
mkcert -install && mkcert -cert-file cert.pem -key-file key.pem 192.168.8.102 localhost 127.0.0.1
ملاحظة. ضع ملفات cert.pem و key.pem التي تم إنشاؤها في teleop .
sudo iptables -A INPUT -p tcp --dport 8012 -j ACCEPT
sudo iptables-save
sudo iptables -L
أو يمكن القيام به مع ufw :
sudo ufw allow 8012
tv = OpenTeleVision(self.resolution_cropped, shm.name, image_queue, toggle_streaming, ngrok=False)
mkcert -CAROOT
انسخ routca.pem عبر Airdrop إلى VisionPro وتثبيته.
الإعدادات> عام> حول> إعدادات الثقة الشهادة. ضمن "تمكين الثقة الكاملة لشهادات الجذر" ، قم بتشغيل الثقة للشهادة.
الإعدادات> التطبيقات> Safari> Advanced> أعلام الميزات> تمكين الميزات ذات الصلة
افتح المتصفح على Safari على VisionPro وانتقل إلى https://192.168.8.102:8012?ws=wss://192.168.8.102:8012
انقر فوق Enter VR Allow لبدء جلسة VR.
بالنسبة لـ META QUEST3 ، فإن تثبيت الشهادة ليس تافهًا. نحن بحاجة إلى استخدام حل دفق الشبكة. نستخدم ngrok لإنشاء نفق آمن للخادم. ستعمل هذه الطريقة لكل من VisionPro و Meta Quest3.
ngrok http 8012
ملاحظة. عند استخدام NGROK لتدفق الشبكة ، تذكر الاتصال بـ OpenTeleVision مع:
self.tv = OpenTeleVision(self.resolution_cropped, self.shm.name, image_queue, toggle_streaming, ngrok=True)
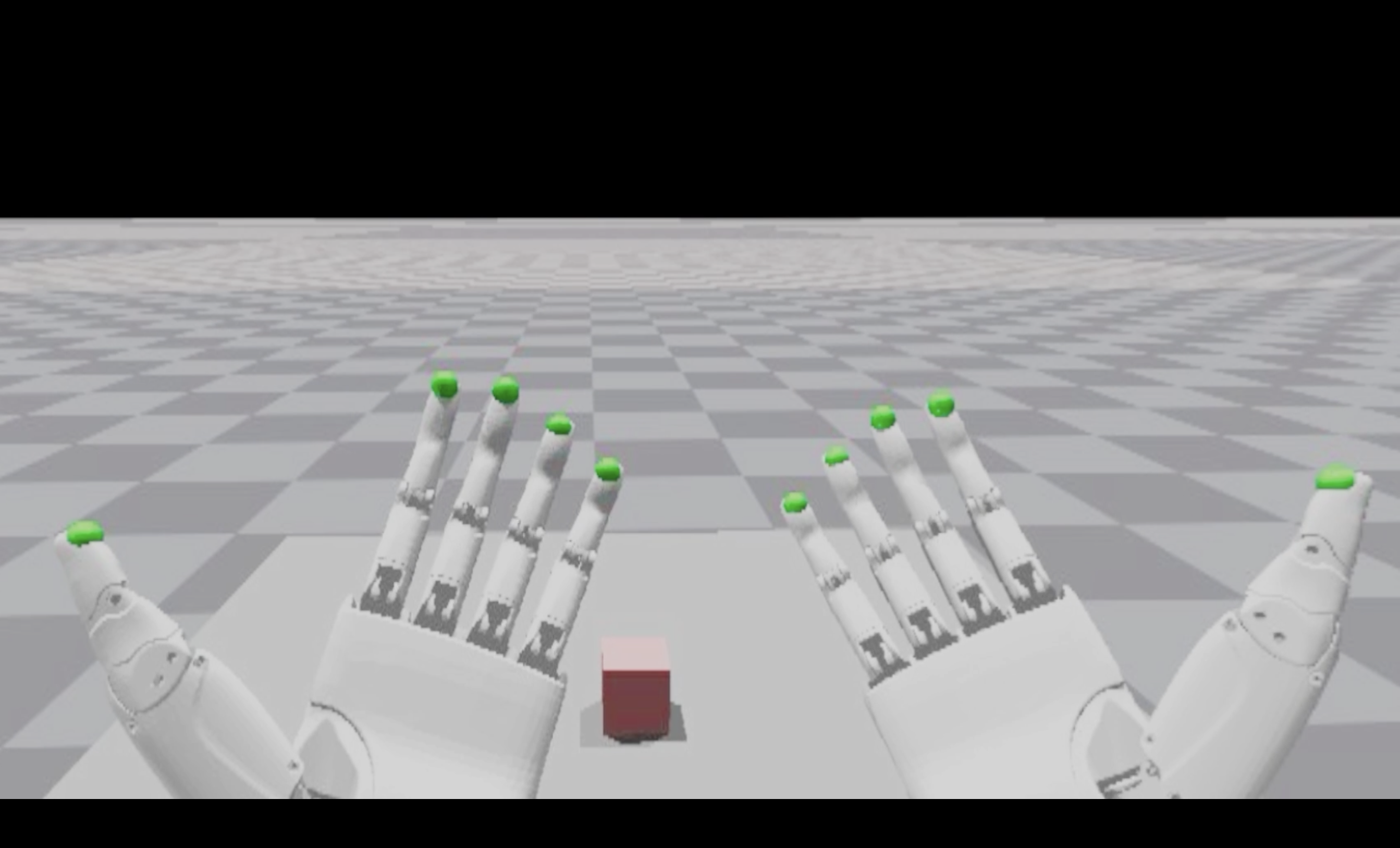
cd teleop && python teleop_hand.py
انتقل إلى موقع Vuer الخاص بك على VisionPro ، انقر فوق Enter VR Allow للدخول إلى بيئة غامرة.
ترى يديك في 3D!
قم بتنزيل مجموعة البيانات من https://drive.google.com/drive/folders/11wo96mumjmxro9hpvm4adz7thuugnemy؟usp=sharing.
ضع مجموعة البيانات التي تم تنزيلها في data/recordings/ .
معالجة مجموعة البيانات المحددة للتدريب باستخدام scripts/post_process.py .
يمكنك التحقق من تسلسل الصور والعمل في حلقة معينة في مجموعة البيانات باستخدام scripts/replay_demo.py .
للتدريب ، قم بالتشغيل:
python imitate_episodes.py --policy_class ACT --kl_weight 10 --chunk_size 60 --hidden_dim 512 --batch_size 45 --dim_feedforward 3200 --num_epochs 50000 --lr 5e-5 --seed 0 --taskid 00 --exptid 01-sample-expt
python imitate_episodes.py --policy_class ACT --kl_weight 10 --chunk_size 60 --hidden_dim 512 --batch_size 45 --dim_feedforward 3200 --num_epochs 50000 --lr 5e-5 --seed 0 --taskid 00 --exptid 01-sample-expt
--save_jit --resume_ckpt 25000
scripts/deploy_sim.py ، مثال على الاستخدام: python deploy_sim.py --taskid 00 --exptid 01 --resume_ckpt 25000
@article{cheng2024tv,
title={Open-TeleVision: Teleoperation with Immersive Active Visual Feedback},
author={Cheng, Xuxin and Li, Jialong and Yang, Shiqi and Yang, Ge and Wang, Xiaolong},
journal={arXiv preprint arXiv:2407.01512},
year={2024}
}


