Jiji Technology recently released the DriveDreamer4D framework, which aims to use the world model to improve the 4D driving scene reconstruction effect. Traditional methods such as NeRF and 3DGS rely on a large amount of training data and perform poorly when dealing with complex road conditions. DriveDreamer4D generates more diverse training data by introducing a world model and a new trajectory generation module (NTGM), which significantly improves the accuracy and robustness of 4D scene reconstruction, bringing new breakthroughs to autonomous driving research and development.
Recently, Jiji Technology proposed a new framework called DriveDreamer4D, which aims to use prior knowledge of the world model to improve the reconstruction effect of 4D driving scenes.
Traditional 4D scene reconstruction methods mainly rely on the two major schools of NeRF and 3DGS. NeRF is like a super painter that can use neural networks to render a bunch of photos into a 3D model. 3DGS uses a bunch of three-dimensional Gaussian functions to simulate various objects in the scene.
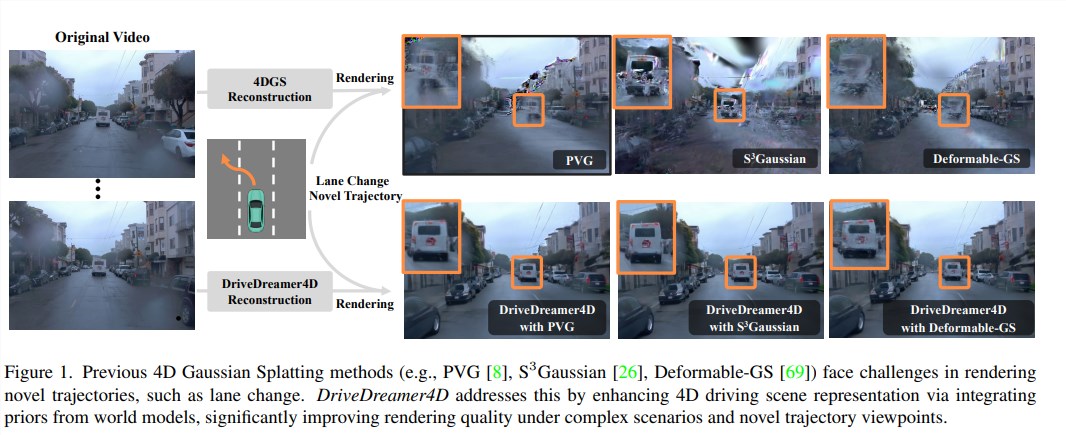
But both methods have a fatal weakness: they rely too much on training data! For example, if you have only seen cars driving in a straight line, and suddenly they drift around a corner, you will be confused. Therefore, they are prone to overturning when facing complex road conditions, such as changing lanes, accelerating, and decelerating.
In order to solve this problem, Jiji Technology has launched a big killer this time-DriveDreamer4D. To put it simply, this thing is an AI plug-in for 4D scene reconstruction - a world model.
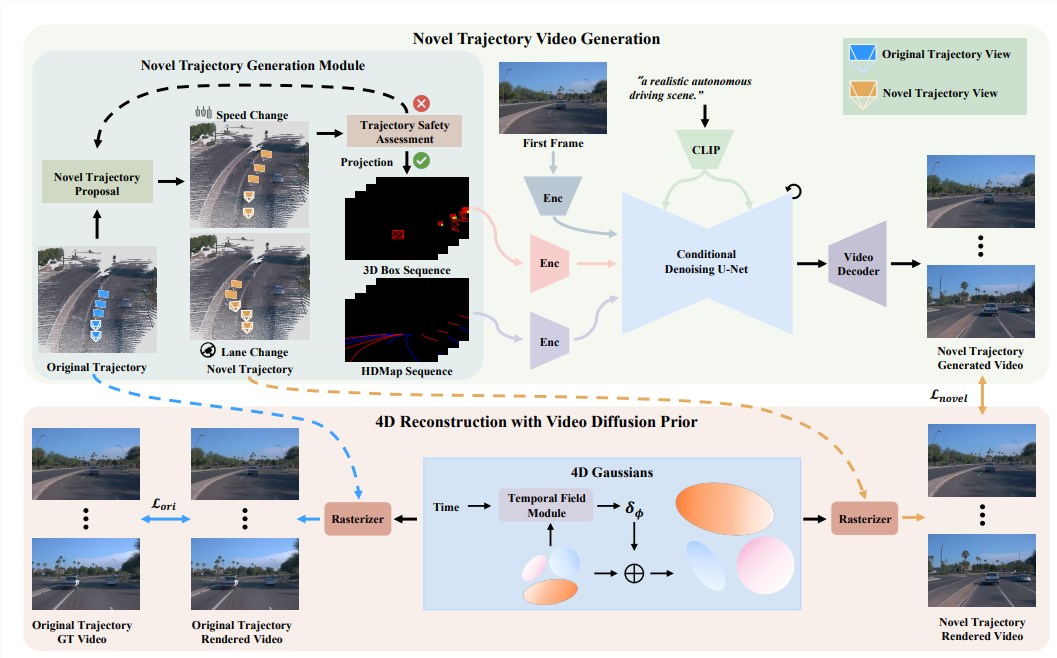
You can understand the world model as an AI brain that can predict what may happen in the future based on existing data. DriveDreamer4D uses the world model to generate new perspective video data under various complex road conditions, which is equivalent to feeding the 4D scene reconstruction model with "brain supplement" training data, so that it is well-informed and will no longer roll over.
What’s even more awesome is that DriveDreamer4D also specially designed a new trajectory generation module (NTGM). This thing can automatically generate various new trajectories that comply with traffic rules, such as lane changes, acceleration, deceleration, etc., and then use the world model to generate videos of the corresponding perspective, which is equivalent to hiring a "sparing partner" for the 4D scene reconstruction model. Allowing it to handle various complex road conditions with ease.
The experimental results also prove the strength of DriveDreamer4D. When dealing with complex road conditions, its reconstruction effect is significantly better than traditional methods, the fidelity of the generated images is higher, and the positions of vehicles and lane lines can be accurately restored.
All in all, the emergence of DriveDreamer4D is like dropping a nuclear bomb in the field of 4D scene reconstruction, directly blowing up the technical ceiling. With it, the research and development and testing of autonomous driving will be more efficient, safer and more reliable.
Of course, DriveDreamer4D is still in the research stage, and there are still many areas for improvement in the future. But I believe that as technology continues to develop, it will become more and more powerful and eventually become an indispensable part of the autonomous driving field.
Paper address: https://arxiv.org/pdf/2410.13571
Project homepage: https://drivedreamer4d.github.io/
Code address: https://github.com/GigaAI-research/DriveDreamer4D
The editor of Downcodes believes that the emergence of DriveDreamer4D marks a new milestone in 4D scene reconstruction technology. Its application prospects in fields such as autonomous driving are broad and worthy of continued attention and anticipation. In the future, as the technology continues to mature, I believe DriveDreamer4D will play a greater role.