Jiji Technology は最近、ワールド モデルを使用して 4D 運転シーンの再構成効果を向上させることを目的とした DriveDreamer4D フレームワークをリリースしました。 NeRF や 3DGS などの従来の方法は、大量のトレーニング データに依存しており、複雑な道路状況を扱う場合にはパフォーマンスが低下します。 DriveDreamer4D は、ワールド モデルと新しい軌道生成モジュール (NTGM) を導入することで、より多様なトレーニング データを生成します。これにより、4D シーン再構成の精度と堅牢性が大幅に向上し、自動運転の研究開発に新たなブレークスルーをもたらします。
最近、時事テクノロジーは、世界モデルの事前知識を使用して 4D 運転シーンの再構成効果を向上させることを目的とした、DriveDreamer4D と呼ばれる新しいフレームワークを提案しました。
従来の 4D シーン再構成手法は主に、NeRF と 3DGS の 2 つの主要な流派に依存しています。 NeRF は、ニューラル ネットワークを使用して大量の写真を 3D モデルにレンダリングできるスーパー ペインターのようなものです。 3DGS は、一連の 3 次元ガウス関数を使用して、シーン内のさまざまなオブジェクトをシミュレートします。
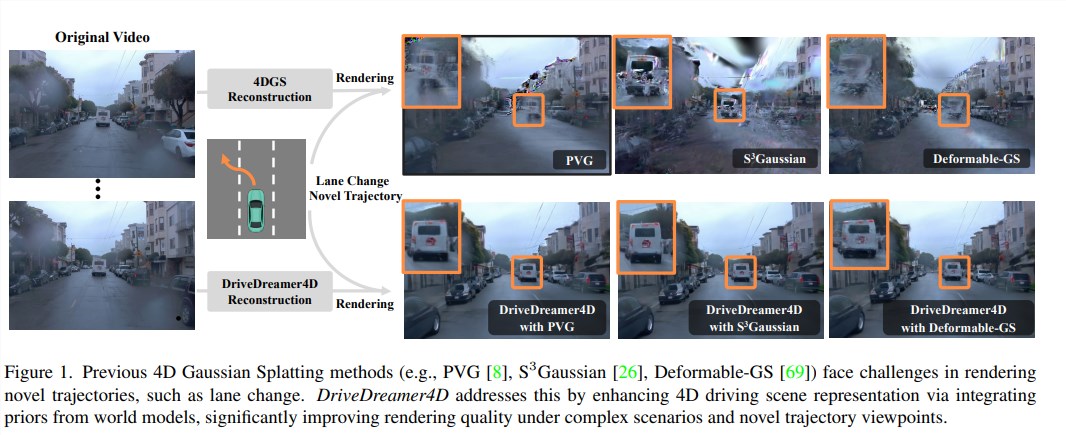
しかし、どちらの方法にも致命的な弱点があります。それは、トレーニング データに依存しすぎることです。たとえば、これまで直線で走行する車しか見たことがなかったのに、突然車がコーナーを曲がると混乱してしまいます。そのため、車線変更や加速、減速などの複雑な道路状況に直面すると、転倒しやすくなります。
この問題を解決するために、時事テクノロジーは今回大きなキラー、DriveDreamer4D を発売しました。簡単に言うと、これは 4D シーン再構築用の AI プラグイン、つまりワールド モデルです。
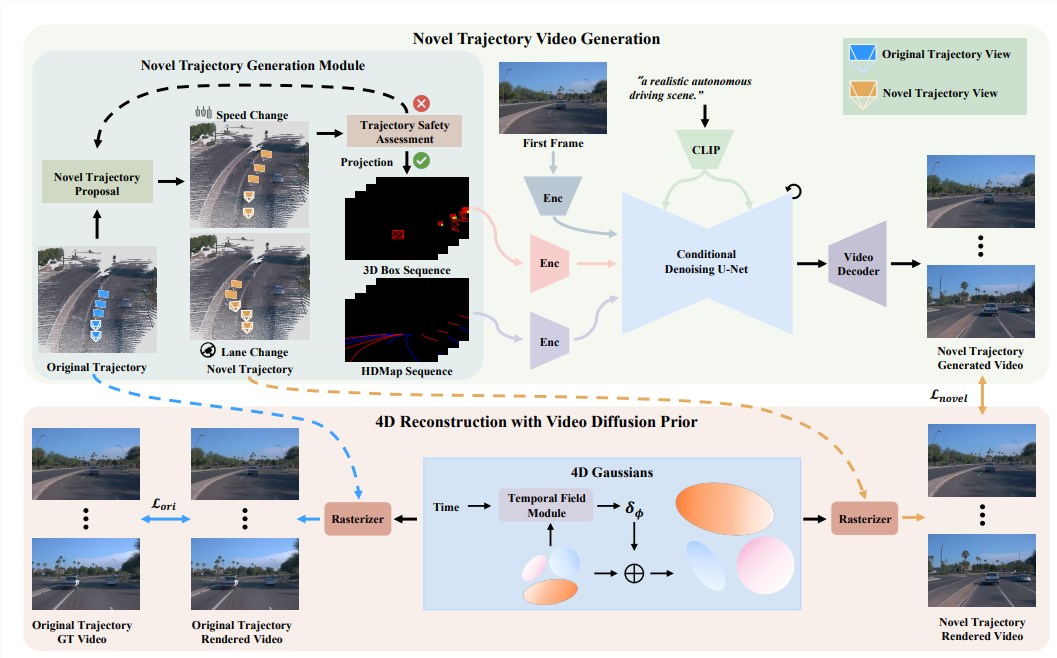
世界モデルは、既存のデータに基づいて将来何が起こるかを予測できる AI の頭脳として理解できます。 DriveDreamer4D は、ワールド モデルを使用して、さまざまな複雑な道路状況下で新しい視点ビデオ データを生成します。これは、4D シーン再構築モデルに「脳補完」トレーニング データを供給するのと同等で、十分な情報が得られ、横転しなくなります。
さらにすごいのは、DriveDreamer4D が新しい軌道生成モジュール (NTGM) を特別に設計したことです。これは、車線変更、加速、減速など、交通ルールに準拠したさまざまな新しい軌道を自動的に生成し、ワールド モデルを使用して対応する視点のビデオを生成します。これは、「スペア パートナー」を雇うことに相当します。 4D シーン再構成モデルにより、さまざまな複雑な道路状況を簡単に処理できるようになります。
実験結果もDriveDreamer4Dの強さを証明しています。複雑な道路状況に対処する場合、その再構成効果は従来の方法よりも大幅に優れており、生成された画像の忠実度はより高く、車両と車線の位置を正確に復元できます。
全体として、DriveDreamer4D の出現は、4D シーン再構築の分野に核爆弾を投下したようなもので、技術的な天井を直接吹き飛ばします。これにより、自動運転の研究開発とテストがより効率的、安全かつ信頼性の高いものになるでしょう。
もちろん、DriveDreamer4D はまだ研究段階にあり、将来的には改善の余地がたくさんあります。しかし、テクノロジーが発展し続けるにつれて、テクノロジーはますます強力になり、最終的には自動運転分野に不可欠な部分になると私は信じています。
論文アドレス: https://arxiv.org/pdf/2410.13571
プロジェクトホームページ: https://drivedreamer4d.github.io/
コードアドレス: https://github.com/GigaAI-research/DriveDreamer4D
Downcodes の編集者は、DriveDreamer4D の登場は 4D シーン再構築技術の新たなマイルストーンとなり、自動運転などの分野での応用の可能性は幅広く、今後も注目と期待に値すると考えています。将来的には、技術が成熟し続けるにつれて、DriveDreamer4D がより大きな役割を果たすことになると思います。