MagicQuartz TechDemo
1.0.0
ที่เก็บนี้มีการออกแบบฮาร์ดแวร์โอเพนซอร์สของสปีดบ็อกซ์แผ่นเสียงที่สามารถใช้เฟิร์มแวร์ Magicquartz ที่เป็นกรรมสิทธิ์ได้ การออกแบบฮาร์ดแวร์ประกอบด้วยสองส่วน:
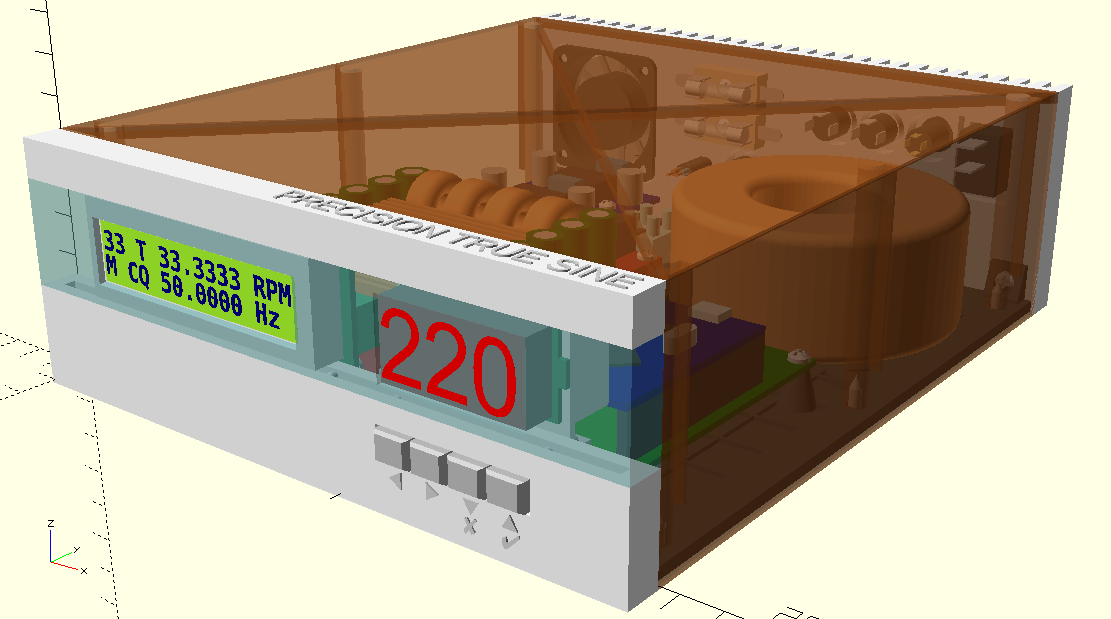
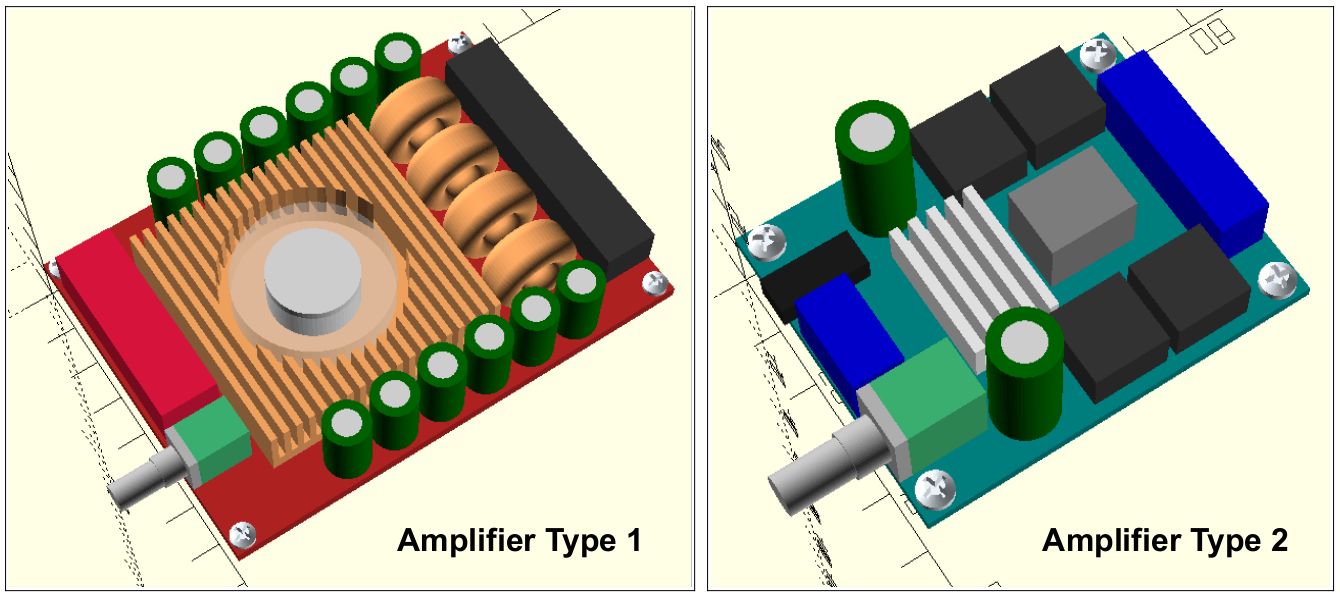
Speedbox ใช้อินเวอร์เตอร์ Power AC อย่างง่ายโดยใช้แอมพลิฟายเออร์เสียงคลาส D และหม้อแปลง toroidal เพื่อเพิ่มแรงดันไฟฟ้า ความเร็วของเครื่องเล่นแผ่นเสียงถูกควบคุมโดยการเปลี่ยนความถี่ AC ที่สร้างขึ้น สิ่งนี้ช่วยให้การสลับอิเล็กทรอนิกส์ระหว่างความเร็วบันทึกมาตรฐาน (16, 33, 45 และ 78 รอบต่อนาที) และการแก้ไขความเร็วตามเวลาจริงโดยใช้เซ็นเซอร์ออปติคัล โปรดทราบว่าวิธีการนี้ใช้ได้เฉพาะกับสแครชกับมอเตอร์ AC
อุปกรณ์รองรับคุณสมบัติที่สำคัญที่สุดของ MagicQuartz เวอร์ชัน 1.0 "Phoenix" รวมถึง "Advanced Power Management" (APM) อย่างไรก็ตามมันขาดสแตนด์บายสำหรับแบ็คไลท์ LCD และแฟน ๆ และมันไม่ได้ใช้ป๊อปซุปเปอร์ฮาร์ดแวร์ด้าน
ข้อมูลและไฟล์ในที่เก็บนี้มีให้ภายใต้ใบอนุญาตโอเพ่นซอร์ส CERN-OHL-S V2 (โปรดคลิกที่นี่เพื่อดูรายละเอียด)
จุดประสงค์เดียวของพื้นที่เก็บข้อมูลนี้คือการออกแบบฮาร์ดแวร์ที่ง่ายต่อการทำซ้ำเพื่อแสดงให้เห็นถึงความสามารถของเฟิร์มแวร์ Magicquartz จนถึงปัจจุบันการออกแบบยังไม่ได้รับการประเมินเกี่ยวกับความปลอดภัยทางไฟฟ้าการปฏิบัติตามแม่เหล็กไฟฟ้า (EMC) และความปลอดภัยจากอัคคีภัย อุปกรณ์ที่ผลิตขึ้นอยู่กับการออกแบบนี้ไม่เหมาะสำหรับผู้ใช้
มีอันตรายร้ายแรงหลายประการที่เกี่ยวข้องกับการสร้างและใช้งานอุปกรณ์นี้ หากคุณไม่มีความรู้เพียงพอโปรดอย่าพยายามสร้างหรือใช้งานอุปกรณ์ โปรดทราบว่าข้อมูลในที่เก็บนี้โดยเจตนาไม่ได้เป็นคำแนะนำการชุมนุม ยังให้ความสนใจอย่างใกล้ชิดกับมาตรา 6 ของใบอนุญาต CERN-OHL-S V2 และข้อควรพิจารณาด้านความปลอดภัยด้านล่าง
ไฟล์ OpenSCAD สามารถใช้ในการสำรวจอุปกรณ์และพิมพ์ 3D ได้
หมายเหตุ: หากสัญลักษณ์ด้านหน้าไม่ปรากฏอย่างถูกต้องจะต้องติดตั้งตัวอักษร "สัญลักษณ์" (ชื่อแพ็คเกจ Ubuntu: fonts-symbola )
ตารางด้านล่างให้ภาพรวมของชิ้นส่วนที่พิมพ์ 3D ทั้งหมดในรุ่น 3D พร้อมกับบันทึกย่อบางส่วน โปรดทราบว่าเวลาการพิมพ์ทั้งหมดประมาณ 22 ชั่วโมง (บน Ultimaker 2)
ในขณะที่ไฟล์ STL มีอยู่ในโฟลเดอร์ release เพื่อความสะดวกของคุณพวกเขาสามารถสร้างได้อย่างง่ายดายใน OpenSCAD ตั้งค่าตัวแปร render_components เป็น false และเปลี่ยนค่าของตัวแปร generate เป็นหมายเลขชิ้นส่วนที่เกี่ยวข้อง จากนั้นกด F5 เพื่อดูตัวอย่างส่วน F6 เพื่อแสดงผลส่วนและ F7 เพื่อส่งออกไฟล์ STL โปรดทราบว่ากระบวนการเรนเดอร์อาจใช้เวลานานแม้ในคอมพิวเตอร์ที่รวดเร็ว โปรดทราบว่าวัตถุที่สร้างขึ้นนั้นมุ่งเน้นไปที่การพิมพ์แล้ว
ฉันมีปัญหาบางอย่างที่พิมพ์ด้วย Cura Version 5.1.1 ถึง 5.3.0 โดยเฉพาะอย่างยิ่งกับส่วน "back" ตัวแบ่งส่วนสร้างสิ่งประดิษฐ์ที่มีความหมายบางอย่างและไม่ได้จัดการกับข้อความตามที่คาดไว้ (เลเยอร์สุดท้ายภายใต้ข้อความไม่ได้พิมพ์ตามที่คาดไว้) ฉันกลับไปที่ 4.13.1
นอกเหนือจากตารางด้านล่าง:
| ส่วน nr. | ชื่อ | สีที่แนะนำ | หมายเหตุ / ข้อยกเว้น |
|---|---|---|---|
| 1 | แผ่นด้านล่าง | สีดำ | อาจถูกพิมพ์โดยไม่ต้องสนับสนุน "ต้นไม้" |
| 1 | แผ่นด้านล่าง (ประหยัดวัสดุ) | สีดำ | บันทึกเส้นใยบางส่วน แต่มีความทนทานน้อยกว่า อาจถูกพิมพ์โดยไม่ต้องสนับสนุน "ต้นไม้" |
| 2 | ส่วนล่างส่วนล่าง | สีขาว | ตั้งค่า "รองรับระยะทาง x/y" เป็น 1.6 มม. เพื่อป้องกันตัวแบ่งส่วนที่สร้างการสนับสนุนในทางเข้าอากาศ |
| 3 | ส่วนตรงกลาง | โปร่งใส | ใช้ลวดลาย "ฟ้าผ่า" เพื่อสร้างลักษณะ "เหมือนควอตซ์" ที่ดี |
| 4 | ส่วนบนส่วนบน | สีขาว | |
| 5 | ปิดบัง | สีน้ำตาล | พิมพ์ตัวแปรนี้หากคุณไม่ได้วางแผนที่จะใช้ฟอยล์ตกแต่ง |
| 5 | ครอบคลุม (ประหยัดวัสดุ) | (ใดๆ) | หากฟอยล์ตกแต่งไม่ได้ยึดติดกับขอบอย่างถูกต้องทรายเล็กน้อยลงไปที่พื้นผิวที่ขอบ |
| 6 | เท้า (พิมพ์ 4x) | เงิน | อาจถูกพิมพ์โดยไม่มี "ขอบ" |
| 7 | ปกโวลต์มิเตอร์ | เป็นด้านหน้า | |
| 8 | การประกอบปุ่ม | เงิน | พิมพ์ด้วย 0.1 มม. หรือน้อยกว่าเพื่อปรับปรุงความแข็งแรงอย่าใช้การสนับสนุนการยึดเกาะ (BRIM) เปิดใช้งานการรีดผ้าบนชั้นบนสุด |
| 9 | กลับ | สีขาว | |
| 10 | ซ็อกเก็ตจำลอง | เป็นหลัง | พิมพ์โดยไม่ต้อง "brim" |
| 11 | เคสเซ็นเซอร์ออปติคัล | สีดำ |
ส่วนประกอบที่จะใช้ควรระบุได้อย่างง่ายดายจากโครงการ OpenSCAD และ KICAD สำหรับส่วนประกอบที่ไม่ชัดเจนในทันทีนี่คือรายละเอียดบางอย่าง:
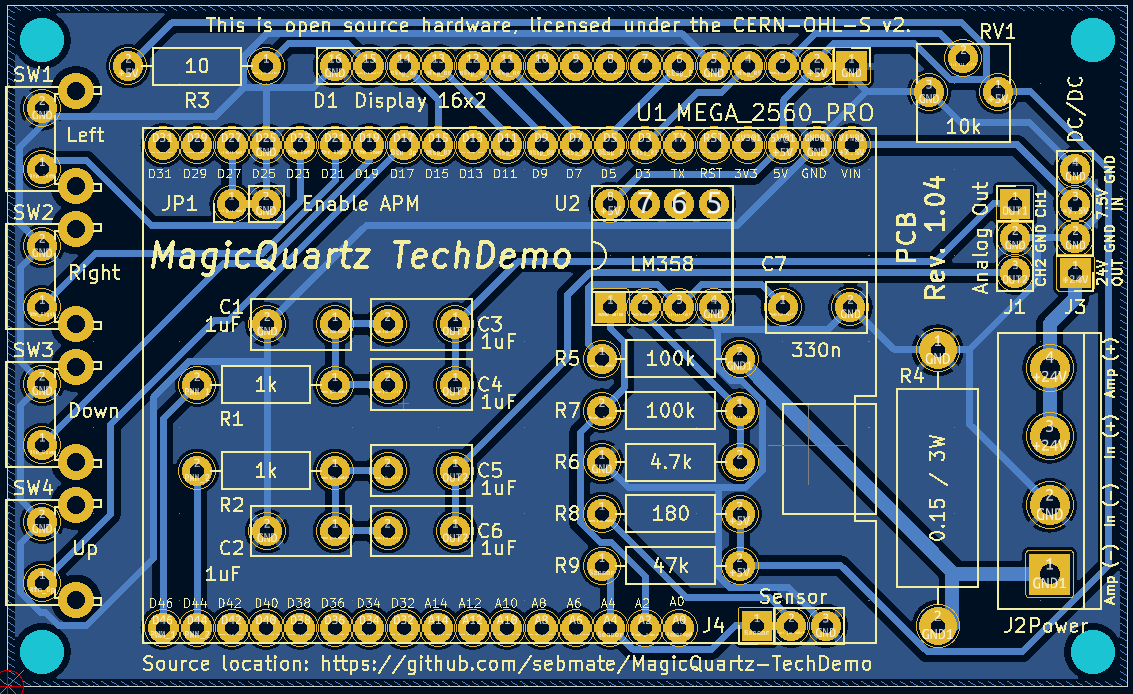
ที่เก็บนี้ยังมีวงจรอิเล็กทรอนิกส์สำหรับเมนบอร์ด PCB ได้รับการออกแบบมาสำหรับการสร้างต้นแบบอย่างรวดเร็วและสามารถผลิตได้ด้านเดียวเช่นด้วย CNC ขนาดเล็กหรือโดยการแกะสลัก อย่างไรก็ตามสามารถใช้เลเยอร์ทองแดงชั้นนำที่เป็นตัวเลือกเพื่อปรับปรุงการป้องกัน แน่นอนว่า PCB สามารถผลิตได้โดยผู้ผลิต PCB ทุกราย
เมนบอร์ดสร้างขึ้นรอบ ๆ บอร์ด "Mega 2560 Pro" (แสดง U1 ในแผนผัง) เพื่อความรู้ของผู้เขียนคณะกรรมการนี้ได้รับการพัฒนาโดย Robotdyn น่าเสียดายที่ดูเหมือนว่าจะไม่สามารถใช้งานได้อีกต่อไป แต่ บริษัท อื่น ๆ ก็มีให้บริการอย่างกว้างขวาง คลิกที่นี่เพื่อดูหน้าเว็บของ Robotdyn เวอร์ชันที่เก็บถาวร
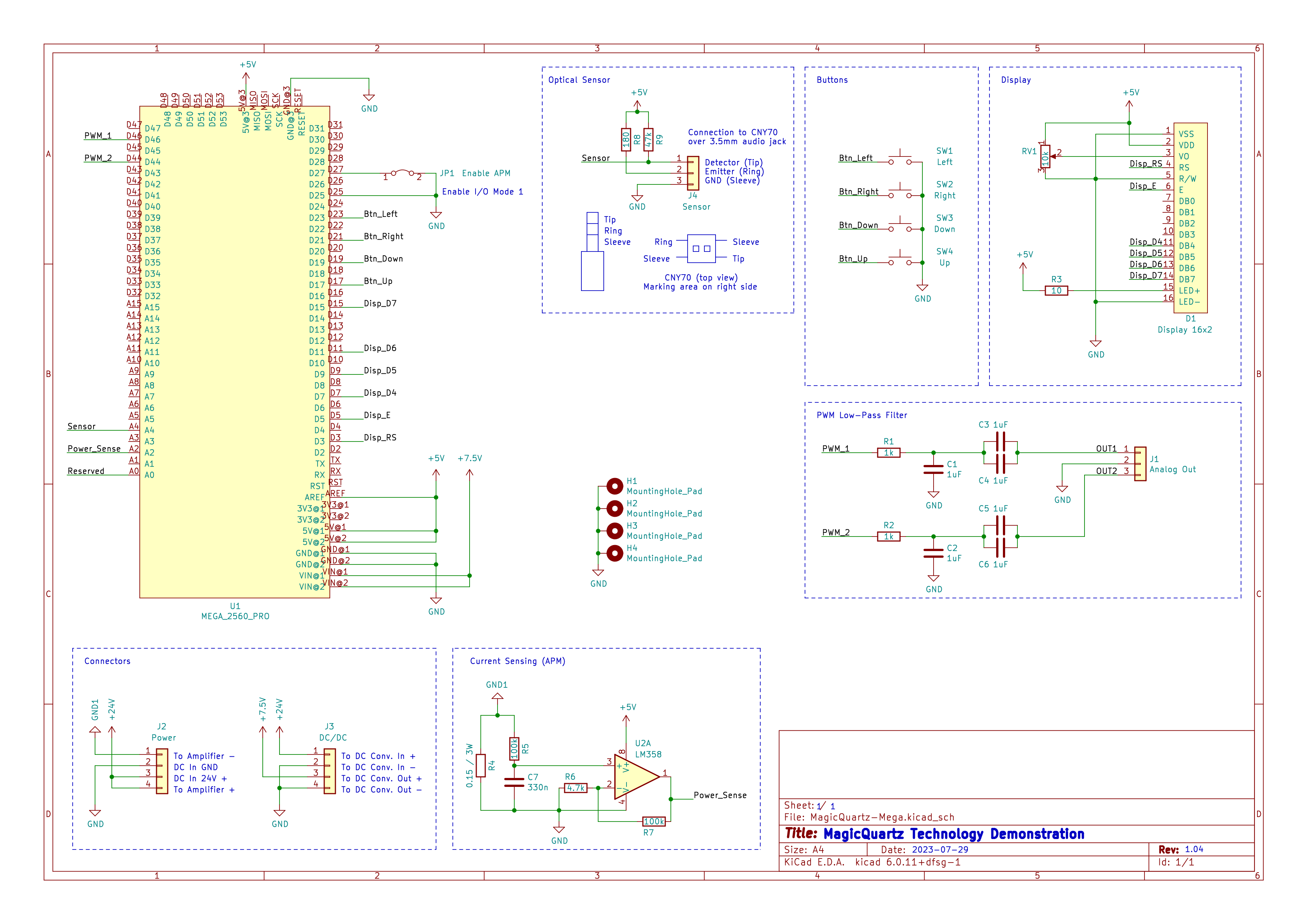
วงจรอิเล็กทรอนิกส์นั้นง่ายมากและควรอธิบายตนเอง อย่างไรก็ตามประเด็นต่อไปนี้อธิบายถึงแง่มุมพิเศษบางประการ:
นี่คือแผนภาพบล็อกที่ให้ภาพรวมของการเชื่อมต่อภายในทั้งหมด:
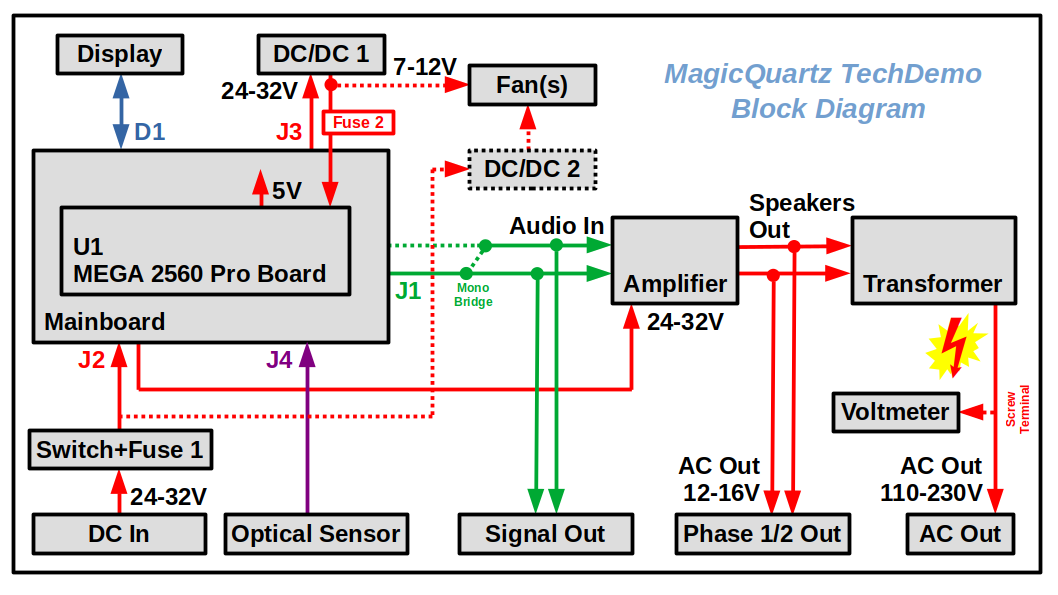
บอร์ด "Mega 2560 Pro" อาจใช้ "AMS1117" 5V Voltage Regulator คุณภาพที่น่าสงสัย (ดูโพสต์บล็อกที่น่าสนใจนี้) ตัวควบคุมอาจล้มเหลวด้วยระยะสั้นภายในหรือบางส่วนและผ่านแรงดันไฟฟ้าอินพุต (7.5V) ไปยังส่วนที่เหลือของวงจร สิ่งนี้อาจไม่เพียง แต่สร้างความเสียหายให้กับส่วนประกอบอื่น ๆ (รวมถึง ATMEGA2560) แต่ยังอาจเพิ่มระดับของสัญญาณไซน์ที่สร้างขึ้น เป็นผลให้อินเวอร์เตอร์อาจสร้างแรงดันไฟฟ้ามากเกินไปและสร้างความเสียหายให้กับแผ่นเสียง
ปัญหาสามารถเอาชนะได้โดยการแทนที่ AMS1117 โดยหน่วยงานกำกับดูแลประเภท "1117" -Type จากผู้ผลิตที่มีชื่อเสียงเช่น LM1117 โดย Texas Instruments หรือ TS1117 โดย Taiwan Semiconductor แน่นอนว่าควรซื้อชิ้นส่วนจากผู้จัดจำหน่ายอิเล็กทรอนิกส์ที่มีชื่อเสียง ตัวควบคุมเก่าสามารถ desoldered ได้อย่างง่ายดายโดยใช้การบัดกรีสดส่วนเกินกับหมุดสามตัวทำให้ทุกอย่างร้อนขึ้นแล้วเช็ดมันออกไปด้วยเหล็กบัดกรี
อาจจำเป็นต้องเพิ่มตัวเก็บประจุอีก 10uf Tantalum เพิ่มเติมขึ้นอยู่กับตัวควบคุมลงในอินพุตและเอาต์พุตของตัวควบคุม (ดูแผ่นข้อมูล) การดัดแปลงดังกล่าวขึ้นอยู่กับ TS1117 จะแสดงในภาพนี้: รูปภาพ/TS1117-modification.jpg สังเกตตัวเก็บประจุแทนทาลัมสีเหลืองใหม่สองตัวและฟิวส์เพิ่มเติม (ดูด้านล่าง) สังเกตขั้วของตัวเก็บประจุอย่างระมัดระวัง!
โซลูชันที่ซับซ้อนมากขึ้น Crowbar Circuit สามารถจัดหาเป็นบอร์ด Piggyback ขนาดเล็กสำหรับ "Mega 2560 Pro" Add-on ดังกล่าวมีอยู่ที่นี่: https://github.com/Sebmate/LittleJimmy นี่คือภาพของมันที่ติดตั้งในสปีดบ็อกซ์: รูปภาพ/littlejimmy.jpg
ฟิวส์เป็นสิ่งจำเป็นสำหรับวงจรชะแลงเท่านั้น แต่ไม่มีอะไรผิดปกติกับการเพิ่มโดยทั่วไป แผนภาพบล็อกด้านบนและแผงด้านหลังของตู้ได้ขยายไปแล้วเพื่อรวมฟิวส์นี้ ตามที่อธิบายไว้ข้างต้นเนื่องจากวงจรกำลังวาดประมาณ 100mA ที่ 7.5V การใช้ฟิวส์ที่ออกฤทธิ์เร็ว 125mA นั้นสมเหตุสมผล
บอร์ดที่ไม่แพงเหล่านี้อาจไม่ได้ใช้ LM2596S ICS ดั้งเดิม (ดูลิงค์นี้สำหรับข้อมูลเพิ่มเติม) อย่างไรก็ตามจนถึงตอนนี้ฉันยังไม่มีปัญหากับสิ่งเหล่านี้ Crowbar Circuit ที่อธิบายไว้ข้างต้นเมื่อติดตั้งบนบอร์ด "Mega 2560 Pro" ยังให้การป้องกันความล้มเหลวที่อาจเกิดขึ้นจากบอร์ดแปลง DC/DC LM2596S DC/DC ดังกล่าว
รายการชิ้นส่วนมีอยู่ใน parts-lists ไดเรกทอรี
หนึ่งในรายการสำหรับผู้จัดจำหน่ายอิเล็กทรอนิกส์เยอรมัน Reichelt รายการนี้สามารถเข้าถึงได้โดยตรงผ่านลิงค์นี้: https://www.reichelt.de/my/2038407 รายการนี้ยังมีส่วนอื่นที่ไม่จำเป็น ดังนั้นรายการจึงไม่ควรสั่งซื้อแบบสุ่มสี่สุ่มห้า โปรดทราบว่าฉันไม่ได้เป็นพันธมิตรกับ Reichelt และฉันเพียงแค่จัดทำรายการนี้เพื่อความสะดวกของคุณ ชิ้นส่วนอาจมีให้จากผู้ขายรายอื่นในราคาที่ต่ำกว่า
images โปรดทราบว่าสิ่งเหล่านี้ยังไม่แสดงการแก้ไขล่าสุดด้วยวงจร Littlejimmy และฟิวส์ที่สอง ขั้นตอนต่อไปนี้อธิบายวิธีการตั้งค่าอุปกรณ์เริ่มแรก:
WaveForm พารามิเตอร์) ให้ตั้งค่าเป็น 2VoltageMtOn ) เอกสารบอกว่าขั้นตอนขึ้นอยู่กับว่าอินเวอร์เตอร์ที่ติดตั้งในสปีดบ็อกซ์มีการควบคุมระดับหรือไม่ มันมี: มันคือการควบคุมระดับเสียงของเครื่องขยายเสียง ดำเนินการตามที่อธิบายไว้ในเอกสารประกอบ: ตั้งค่า VoltageMtOn เป็น 1 จากนั้นช้าลงและเปิดการควบคุมระดับเสียงของเครื่องขยายเสียงอย่างระมัดระวังจนกระทั่งถึงแรงดันไฟฟ้าที่ต้องการ (เช่น 220V) หากแอมพลิฟายเออร์เปลี่ยนเป็นสถานะการป้องกันให้ลองอีกครั้งRampingSpeed ที่ต่ำเกินไปจากนั้นรีสตาร์ทอินเวอร์เตอร์ หากไม่ได้ผลและหากค่าปัจจุบันที่วัดได้ในเฟิร์มแวร์อยู่ที่ระดับล่างสุดของช่วงการวัด (ซึ่งมาจาก 0 ถึง 1023) คุณอาจแทนที่ R7 ด้วยตัวต้านทานค่าที่สูงขึ้นเช่น 470 KOHM

