semantic segmentation pytorch
1.0.0
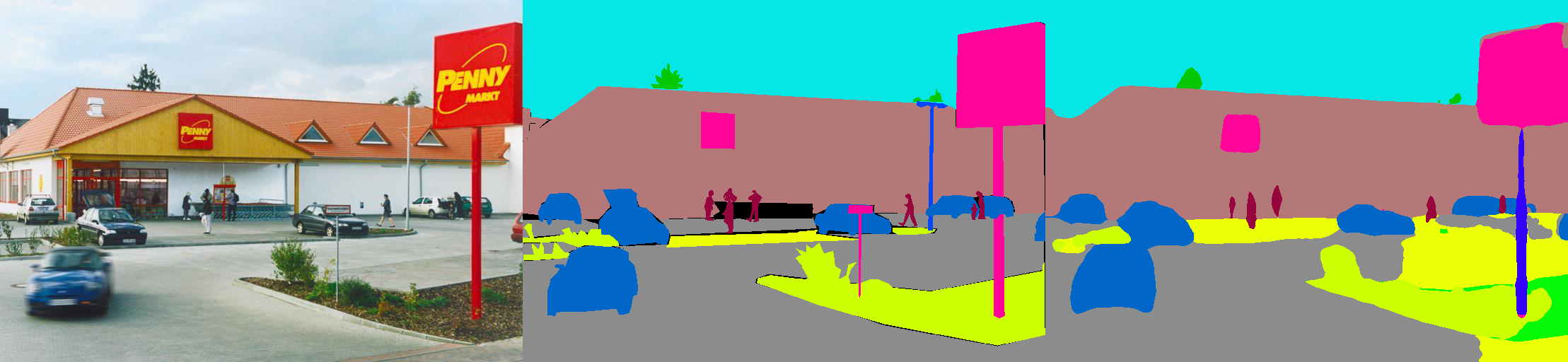
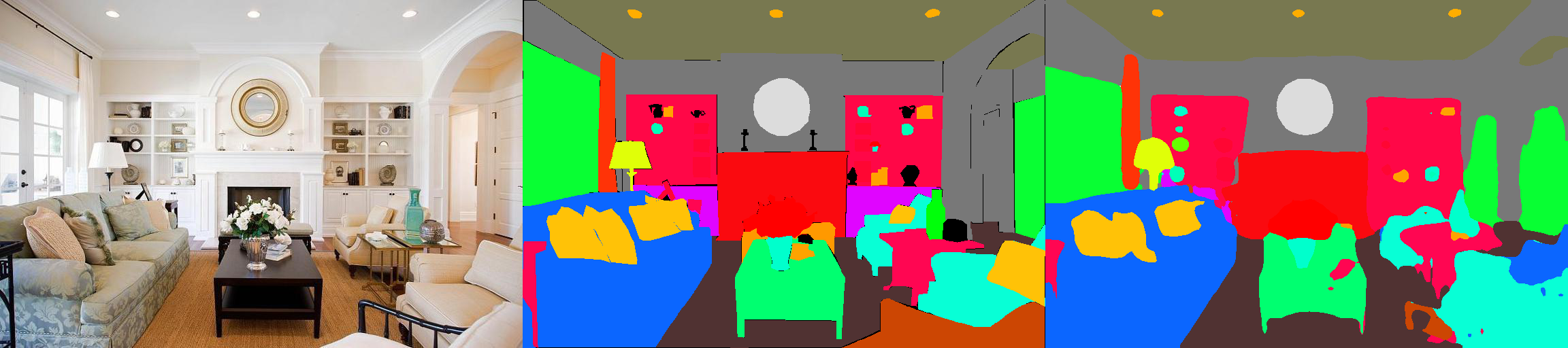
Esta é uma implementação de Pytorch de modelos de segmentação semântica no conjunto de dados do MIT Ade20K Scene Parsing (http://sceneparsing.csail.mit.edu/).
O ADE20K é o maior conjunto de dados de código aberto para segmentação semântica e análise de cenas, lançada pela equipe do MIT Computer Vision. Siga o link abaixo para encontrar o repositório para o nosso conjunto de dados e implementações em Caffe e Torch7: https://github.com/csailvision/sceneparsing
Se você simplesmente deseja brincar com a nossa demonstração, tente este link: http://scenesegmentation.csail.mit.edu Você pode fazer upload de sua própria foto e analisá -la!
Você também pode usar este playground do Colab Notebooks aqui para mexer com o código para segmentar uma imagem.
Todos os modelos pré -gravados podem ser encontrados em: http://sceneparsing.csail.mit.edu/model/pytorch
A codificação de cores de categorias semânticas pode ser encontrada aqui: https://docs.google.com/spreadsheets/d/1se8yetb2dets7oupe86fxgyd269pmycawe2mtkuj2w8/edit?usp=Sharing
config/defaults.py .Este módulo calcula a média e a devista padrão em todos os dispositivos durante o treinamento. Empiricamente, descobrimos que um tamanho de lote grande razoável é importante para a segmentação. Agradecemos a Jiayuan Mao por suas gentis contribuições, consulte a Batchnorm-Pytorch sincronizada para obter detalhes.
A implementação é fácil de usar como:
Para a tarefa da segmentação semântica, é bom manter a proporção de imagens durante o treinamento. Por isso, reimplementamos o módulo DataParallel e fazemos com que ele dê suporte a distribuição de dados para várias GPUs no Python Dict, para que cada GPU possa processar imagens de tamanhos diferentes. Ao mesmo tempo, o Dataloader também opera de maneira diferente.
Agora, o tamanho do lote de um dataloader sempre é igual ao número de GPUs , cada elemento será enviado para uma GPU. Também é compatível com o multipocessamento. Observe que o índice de arquivos para o dataloader multipocessante é armazenado no processo mestre, que está contradizido com o nosso objetivo de que cada trabalhador mantenha sua própria lista de arquivos. Por isso, usamos um truque de que, embora o processo mestre ainda forneça ao Dataloader um índice para a função __getitem__ , apenas ignoramos essa solicitação e enviamos um ditado de lote aleatório. Além disso, os múltiplos trabalhadores bifurcados pelo Dataloader têm a mesma semente , você descobrirá que vários trabalhadores produzirão exatamente os mesmos dados, se usarmos o truque acima mencionado diretamente. Portanto, adicionamos uma linha de código que define a semente de defesa para numpy.random antes de ativar vários trabalhadores no Dataloader.
Dividimos nossos modelos em codificador e decodificador, onde os codificadores geralmente são modificados diretamente das redes de classificação, e os decodificadores consistem em convoluções finais e amostragem de ups. Fornecemos alguns modelos pré-configurados na pasta config .
Codificador:
Decodificador:
IMPORTANTE: A resmnet base em nosso repositório é personalizada (diferente da da Torchvision). Os modelos básicos serão baixados automaticamente quando necessário.
| Arquitetura | Testes em várias escalas | Significa IOU | Precisão de pixel (%) | Pontuação geral | Velocidade de inferência (fps) |
|---|---|---|---|---|---|
| MobileNetv2Dilated + c1_deepsup | Não | 34.84 | 75.75 | 54.07 | 17.2 |
| Sim | 33.84 | 76.80 | 55.32 | 10.3 | |
| MobileNetv2Dilated + ppm_deepsup | Não | 35.76 | 77.77 | 56.27 | 14.9 |
| Sim | 36.28 | 78.26 | 57.27 | 6.7 | |
| Resnet18Dilated + C1_Deepsup | Não | 33.82 | 76.05 | 54.94 | 13.9 |
| Sim | 35.34 | 77.41 | 56.38 | 5.8 | |
| Resnet18Dilated + PPM_DEEPSUP | Não | 38.00 | 78.64 | 58.32 | 11.7 |
| Sim | 38.81 | 79.29 | 59.05 | 4.2 | |
| Resnet50dilated + ppm_deepsup | Não | 41.26 | 79.73 | 60,50 | 8.3 |
| Sim | 42.14 | 80.13 | 61.14 | 2.6 | |
| Resnet101Dilated + PPM_DEEPSUP | Não | 42.19 | 80,59 | 61.39 | 6.8 |
| Sim | 42.53 | 80.91 | 61.72 | 2.0 | |
| UPERNET50 | Não | 40.44 | 79.80 | 60.12 | 8.4 |
| Sim | 41.55 | 80.23 | 60,89 | 2.9 | |
| UPERNET101 | Não | 42.00 | 80,79 | 61.40 | 7.8 |
| Sim | 42.66 | 81.01 | 61.84 | 2.3 | |
| Hrnetv2 | Não | 42.03 | 80,77 | 61.40 | 5.8 |
| Sim | 43.20 | 81.47 | 62.34 | 1.9 |
O treinamento é comparado em um servidor com 8 NVIDIA Pascal Titan XP GPUS (memória GPU de 12 GB), a velocidade de inferência é comparada com uma única GPU NVIDIA Pascal Titan XP, sem visualização.
O código é desenvolvido nas seguintes configurações.
[--gpus GPUS] de acordo)chmod +x demo_test.sh
./demo_test.shEste script baixa um modelo treinado (resnet50dilated + ppm_deepsup) e uma imagem de teste, executa o script de teste e salva a segmentação prevista (.png) no diretório de trabalho.
$PATH_IMG ), você pode simplesmente fazer o seguinte: python3 -u test.py --imgs $PATH_IMG --gpu $GPU --cfg $CFG
chmod +x download_ADE20K.sh
./download_ADE20K.sh$GPUS ) e configuração ( $CFG ) para usar. Durante o treinamento, os pontos de verificação por padrão são salvos na pasta ckpt . python3 train.py --gpus $GPUS --cfg $CFG --gpus 0-7 ou --gpus 0,2,4,6 .Por exemplo, você pode começar com nossas configurações fornecidas:
python3 train.py --gpus GPUS --cfg config/ade20k-mobilenetv2dilated-c1_deepsup.yamlpython3 train.py --gpus GPUS --cfg config/ade20k-resnet50dilated-ppm_deepsup.yamlpython3 train.py --gpus GPUS --cfg config/ade20k-resnet101-upernet.yamlpython3 train.py TRAIN.num_epoch 10 . VAL.visualize True no argumento às visualizações de saída, como mostrado no teaser.Por exemplo:
python3 eval_multipro.py --gpus GPUS --cfg config/ade20k-mobilenetv2dilated-c1_deepsup.yamlpython3 eval_multipro.py --gpus GPUS --cfg config/ade20k-resnet50dilated-ppm_deepsup.yamlpython3 eval_multipro.py --gpus GPUS --cfg config/ade20k-resnet101-upernet.yaml Esta biblioteca pode ser instalada via pip para se integrar facilmente com outra base de código
pip install git+https://github.com/CSAILVision/semantic-segmentation-pytorch.git@masterAgora essa biblioteca pode ser facilmente consumida programaticamente. Por exemplo
from mit_semseg . config import cfg
from mit_semseg . dataset import TestDataset
from mit_semseg . models import ModelBuilder , SegmentationModule Se você achar útil o código ou os modelos pré-treinados, cite os seguintes papéis:
Entendimento semântico das cenas através do conjunto de dados Ade20K. B. Zhou, H. Zhao, X. Puig, T. Xiao, S. Fidler, A. Barriso e A. Torralba. International Journal on Computer Vision (IJCV), 2018. (https://arxiv.org/pdf/1608.05442.pdf)
@article{zhou2018semantic,
title={Semantic understanding of scenes through the ade20k dataset},
author={Zhou, Bolei and Zhao, Hang and Puig, Xavier and Xiao, Tete and Fidler, Sanja and Barriuso, Adela and Torralba, Antonio},
journal={International Journal on Computer Vision},
year={2018}
}
Cena analisando o conjunto de dados Ade20K. B. Zhou, H. Zhao, X. Puig, S. Fidler, A. Barriso e A. Torralba. Visão computacional e reconhecimento de padrões (CVPR), 2017. (http://people.csail.mit.edu/bzhou/publication/scene-parse-camera-ready.pdf)
@inproceedings{zhou2017scene,
title={Scene Parsing through ADE20K Dataset},
author={Zhou, Bolei and Zhao, Hang and Puig, Xavier and Fidler, Sanja and Barriuso, Adela and Torralba, Antonio},
booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
year={2017}
}


