semantic segmentation pytorch
1.0.0
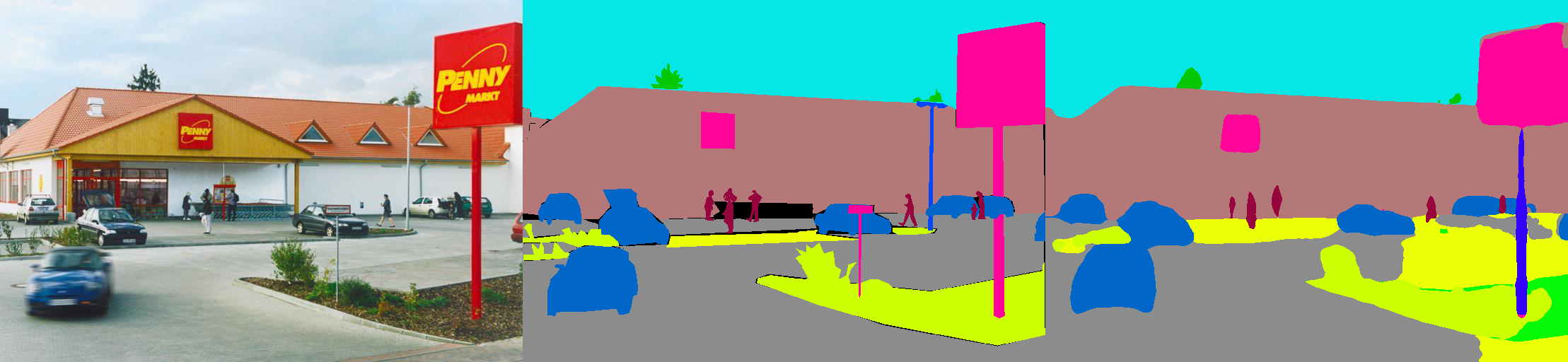
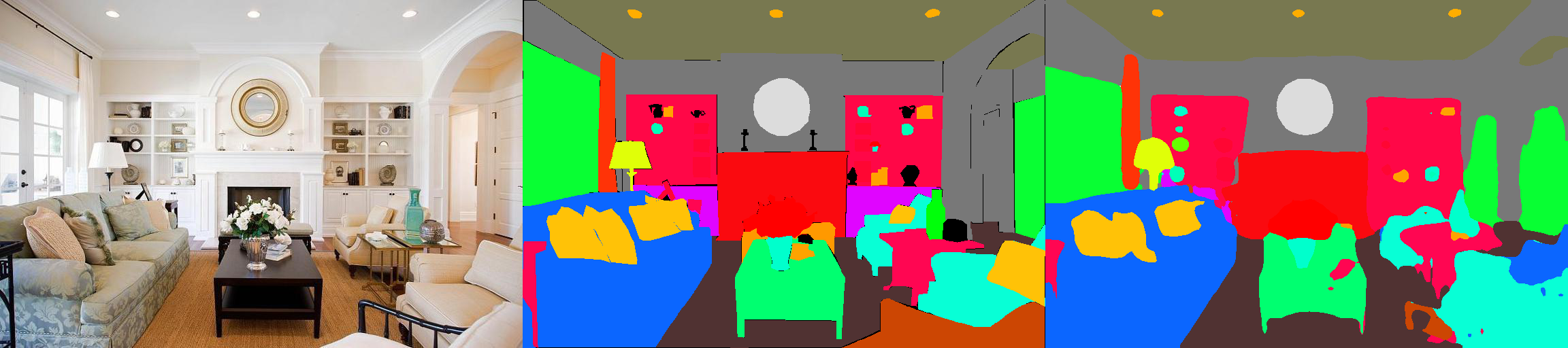
Esta es una implementación de Pytorch de modelos de segmentación semántica en el conjunto de datos de análisis de la escena MIT ADE20K (http://sceneparsing.csail.mit.edu/).
ADE20K es el conjunto de datos de código abierto más grande para la segmentación semántica y el análisis de la escena, lanzado por MIT Computer Vision Team. Siga el siguiente enlace para encontrar el repositorio de nuestro conjunto de datos e implementaciones en Caffe y Torch7: https://github.com/csailvision/sceneParsing
Si simplemente desea jugar con nuestra demostración, pruebe este enlace: http://scenesegmentation.csail.mit.edu ¡Puede cargar su propia foto y analizarla!
También puede usar este patio de cuaderno Colab aquí para jugar con el código para segmentar una imagen.
Se pueden encontrar todos los modelos previos a: http://sceneparsing.csail.mit.edu/model/pytorch
La codificación de color de las categorías semánticas se puede encontrar aquí: https://docs.google.com/spreadsheets/d/1se8yetb2dets7oupe86fxgyd269pmycawe2mtkuj2w8/edit?usp=sharing
config/defaults.py .Este módulo calcula la diana media y estándar en todos los dispositivos durante el entrenamiento. Encontramos empíricamente que un tamaño de lote grande razonable es importante para la segmentación. Agradecemos a Jiayuan Mao por sus amables contribuciones, consulte Sincronized-BatchNorm-Pytorch para obtener más detalles.
La implementación es fácil de usar como:
Para la tarea de segmentación semántica, es bueno mantener la relación de aspecto de las imágenes durante el entrenamiento. Por lo tanto, volvemos a implementar el módulo DataParallel y hacemos que admita la distribución de datos a múltiples GPU en Python DICT, para que cada GPU pueda procesar imágenes de diferentes tamaños. Al mismo tiempo, el DataLoader también funciona de manera diferente.
Ahora el tamaño de lote de un dataLoader siempre es igual al número de GPU , cada elemento se enviará a una GPU. También es compatible con el procesamiento múltiple. Tenga en cuenta que el índice de archivos para el dataloader de procesamiento múltiple se almacena en el proceso maestro, que contradice con nuestro objetivo que cada trabajador mantenga su propia lista de archivos. Por lo tanto, usamos un truco que aunque el proceso maestro todavía le da a DataLoader un índice para la función __getitem__ , simplemente ignoramos dicha solicitud y enviamos un dict de lote aleatorio. Además, los múltiples trabajadores bifurcados por el dataloader tienen la misma semilla , encontrará que varios trabajadores producirán exactamente los mismos datos, si usamos el truco mencionado anteriormente directamente. Por lo tanto, agregamos una línea de código que establece la semilla Defaut para numpy.random antes de activar múltiples trabajadores en DataLoader.
Dividimos nuestros modelos en codificador y decodificador, donde los codificadores generalmente se modifican directamente de las redes de clasificación, y los decodificadores consisten en convoluciones finales y muestreo ascendente. Hemos proporcionado algunos modelos preconfigurados en la carpeta config .
Codificador:
Descifrador:
IMPORTANTE: El resnet base en nuestro repositorio es personalizado (diferente al de TorchVision). Los modelos base se descargarán automáticamente cuando sea necesario.
| Arquitectura | Prueba multiescala | Significa iou | Precisión de píxeles (%) | Puntaje general | Velocidad de inferencia (FPS) |
|---|---|---|---|---|---|
| MobileNetv2Dilated + C1_DeepSup | No | 34.84 | 75.75 | 54.07 | 17.2 |
| Sí | 33.84 | 76.80 | 55.32 | 10.3 | |
| MobileNetv2Dilated + ppm_deepsup | No | 35.76 | 77.77 | 56.27 | 14.9 |
| Sí | 36.28 | 78.26 | 57.27 | 6.7 | |
| Resnet18dilated + c1_deepsup | No | 33.82 | 76.05 | 54.94 | 13.9 |
| Sí | 35.34 | 77.41 | 56.38 | 5.8 | |
| Resnet18dilated + ppm_deepsup | No | 38.00 | 78.64 | 58.32 | 11.7 |
| Sí | 38.81 | 79.29 | 59.05 | 4.2 | |
| Resnet50dilated + ppm_deepsup | No | 41.26 | 79.73 | 60.50 | 8.3 |
| Sí | 42.14 | 80.13 | 61.14 | 2.6 | |
| Resnet101dilated + ppm_deepsup | No | 42.19 | 80.59 | 61.39 | 6.8 |
| Sí | 42.53 | 80.91 | 61.72 | 2.0 | |
| UPERNET50 | No | 40.44 | 79.80 | 60.12 | 8.4 |
| Sí | 41.55 | 80.23 | 60.89 | 2.9 | |
| UPERNET101 | No | 42.00 | 80.79 | 61.40 | 7.8 |
| Sí | 42.66 | 81.01 | 61.84 | 2.3 | |
| Hrnetv2 | No | 42.03 | 80.77 | 61.40 | 5.8 |
| Sí | 43.20 | 81.47 | 62.34 | 1.9 |
La capacitación se comparó en un servidor con 8 GPU de Nvidia Pascal Titan XP (memoria GPU de 12 GB), la velocidad de inferencia se compare con una sola GPU Nvidia Pascal Titan XP, sin visualización.
El código se desarrolla en las siguientes configuraciones.
[--gpus GPUS] en consecuencia)chmod +x demo_test.sh
./demo_test.shEste script descarga un modelo capacitado (resnet50dilated + ppm_deepsup) y una imagen de prueba, ejecuta el script de prueba y guarda la segmentación predicha (.png) al directorio de trabajo.
$PATH_IMG ), simplemente puede hacer lo siguiente: python3 -u test.py --imgs $PATH_IMG --gpu $GPU --cfg $CFG
chmod +x download_ADE20K.sh
./download_ADE20K.sh$GPUS ) y el archivo de configuración ( $CFG ) para usar. Durante el entrenamiento, los puntos de control de forma predeterminada se guardan en la carpeta ckpt . python3 train.py --gpus $GPUS --cfg $CFG --gpus 0-7 o --gpus 0,2,4,6 .Por ejemplo, puede comenzar con nuestras configuraciones proporcionadas:
python3 train.py --gpus GPUS --cfg config/ade20k-mobilenetv2dilated-c1_deepsup.yamlpython3 train.py --gpus GPUS --cfg config/ade20k-resnet50dilated-ppm_deepsup.yamlpython3 train.py --gpus GPUS --cfg config/ade20k-resnet101-upernet.yamlpython3 train.py TRAIN.num_epoch 10 . VAL.visualize True en las visualizaciones de argumento a salida como se muestra en el teaser.Por ejemplo:
python3 eval_multipro.py --gpus GPUS --cfg config/ade20k-mobilenetv2dilated-c1_deepsup.yamlpython3 eval_multipro.py --gpus GPUS --cfg config/ade20k-resnet50dilated-ppm_deepsup.yamlpython3 eval_multipro.py --gpus GPUS --cfg config/ade20k-resnet101-upernet.yaml Esta biblioteca se puede instalar a través de pip para integrarse fácilmente con otra base de código
pip install git+https://github.com/CSAILVision/semantic-segmentation-pytorch.git@masterAhora esta biblioteca se puede consumir fácilmente programáticamente. Por ejemplo
from mit_semseg . config import cfg
from mit_semseg . dataset import TestDataset
from mit_semseg . models import ModelBuilder , SegmentationModule Si encuentra útil el código o los modelos previamente capacitados, cite los siguientes documentos:
Comprensión semántica de las escenas a través del conjunto de datos ADE20K. B. Zhou, H. Zhao, X. Puig, T. Xiao, S. Fidler, A. Barriuso y A. Torralba. International Journal on Computer Vision (IJCV), 2018. (Https://arxiv.org/pdf/1608.05442.pdf)
@article{zhou2018semantic,
title={Semantic understanding of scenes through the ade20k dataset},
author={Zhou, Bolei and Zhao, Hang and Puig, Xavier and Xiao, Tete and Fidler, Sanja and Barriuso, Adela and Torralba, Antonio},
journal={International Journal on Computer Vision},
year={2018}
}
Escena analizando a través del conjunto de datos ADE20K. B. Zhou, H. Zhao, X. Puig, S. Fidler, A. Barriuso y A. Torralba. Visión por computadora y reconocimiento de patrones (CVPR), 2017. (Http://people.csail.mit.edu/bzhou/publication/scene-parse-camera-ready.pdf)
@inproceedings{zhou2017scene,
title={Scene Parsing through ADE20K Dataset},
author={Zhou, Bolei and Zhao, Hang and Puig, Xavier and Fidler, Sanja and Barriuso, Adela and Torralba, Antonio},
booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
year={2017}
}


