ebyte e32 ui
vision 0.5.0: CDev GPIO instead of SYS
EBYTE E32 명령 줄 인터페이스 + 최소 GUI.
구성 가능한 핀 할당이있는 EBYTE-E32 LORA 모듈과 함께 작동합니다. 3 GPIO는 Linux CDEV를 통해 제어되며 직렬 포트는 정상 /dev/ttyXXX 특징에 의해 제어됩니다.
Ebyte-E32-R을 드라이버로 사용하고 임베디드 hal의 일부 특성 및 Linux-embedded-Hal의 구현을 사용합니다.
CLI의 경우 박수가 사용됩니다.
GUI의 경우 박수 위에 Klask가 사용됩니다.
binary와 동일한 디렉토리의 Config.toml 사용하여 configurable (또는 옵션 config 설정) :
serial_path = " /dev/ttyAMA0 "
baudrate = 9600
parity = " None "
data_bits = 8
stop_bits = 1
gpiochip_path = " /dev/gpiochip0 "
aux_pin = 18
m0_pin = 23
m1_pin = 24| 에비트 핀 | 라즈베리 파이 핀 (BCM 핀 번호) |
|---|---|
| VCC | 3v3 |
| Gnd | Gnd |
| 보조 | 18 |
| M0 | 23 |
| M1 | 24 |
| TX | 15 (Rx) |
| RX | 14 (TX) |
이 예에서는 ebyte-e32-cli cargo run --bin ebyte-e32-cli 로 대체 할 수 있습니다. 이 디렉토리에는 Config.toml 예제도 포함되어 있습니다.
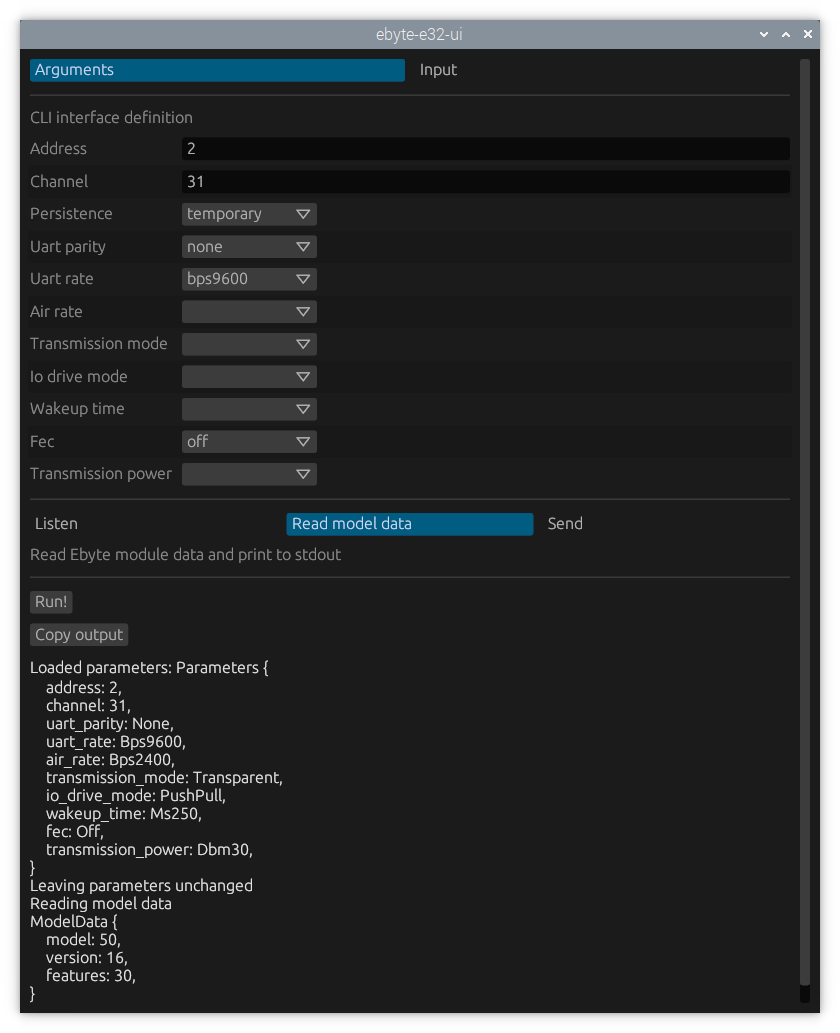
모델 데이터 또는 매개 변수 읽기 (좋은 첫 번째 테스트) :
ebyte-e32-cli {read-model-data|read-parameters}
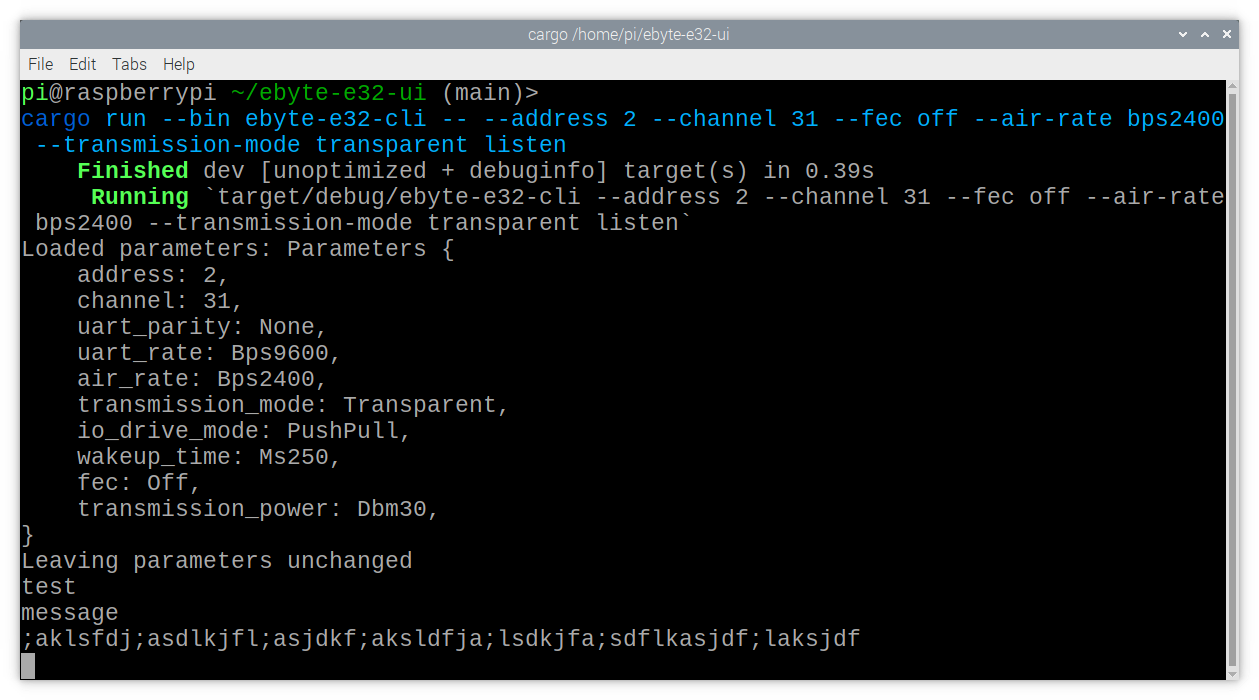
전송을 듣기 :
ebyte-e32-cli listen
주소 1, 채널 16, 전방 오류 수정 없음, 영구 지속성을 구성하십시오.
ebyte-e32-cli configure --address 1 --channel 16 --fec off --persistence permanent
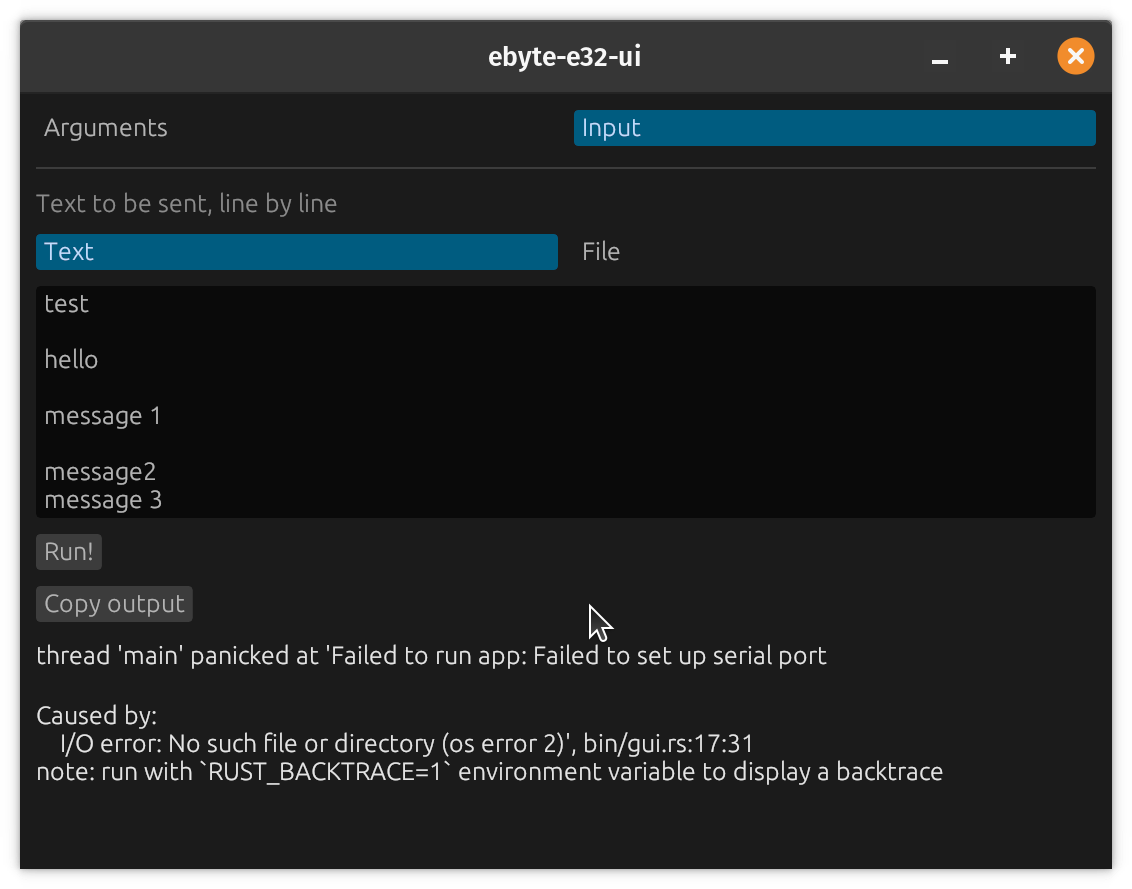
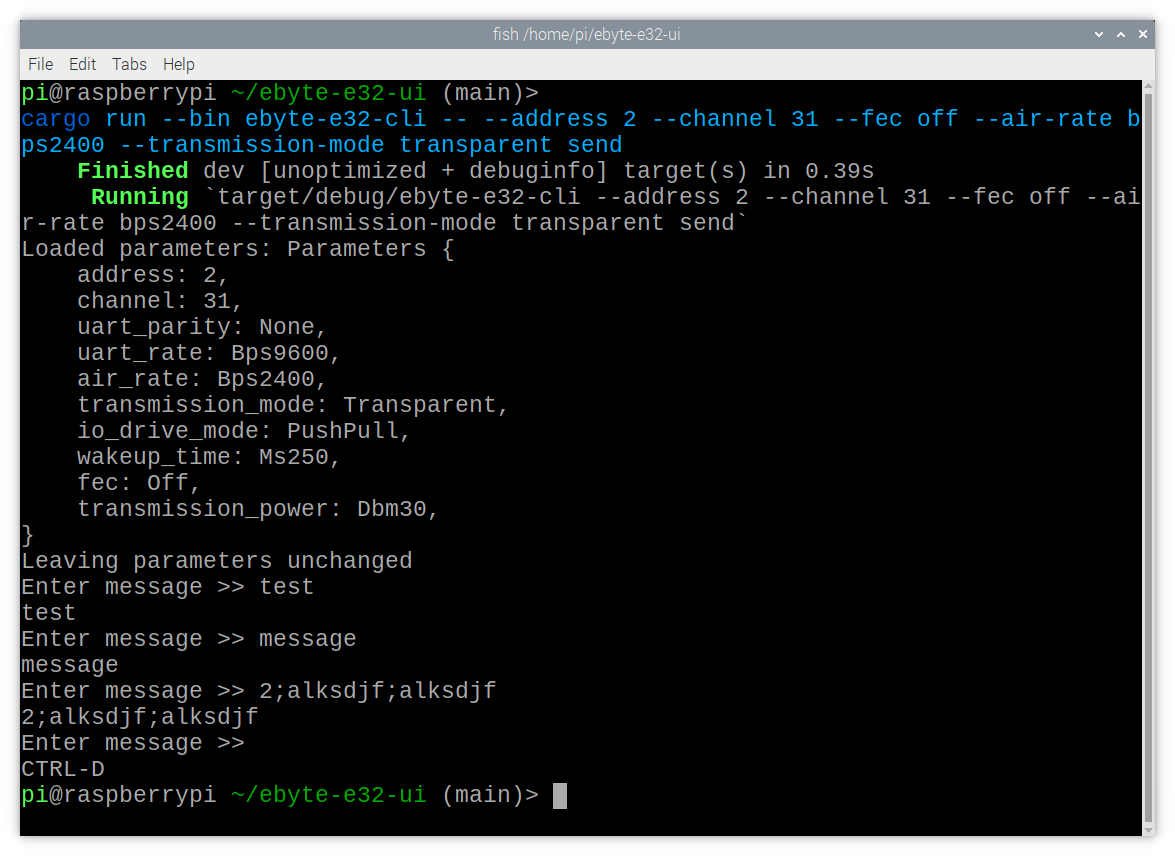
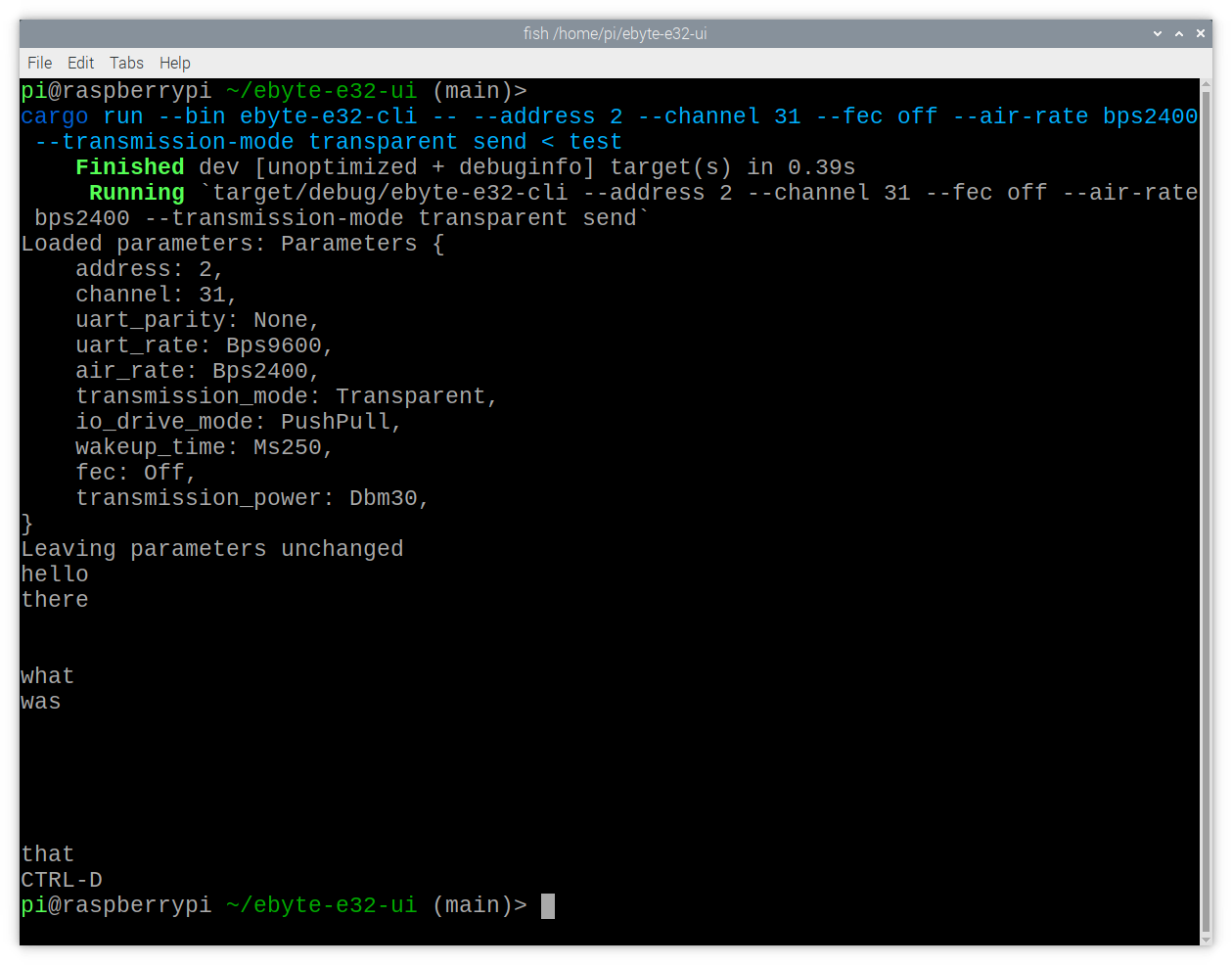
send 모드의 경우 프롬프트에 메시지를 입력하거나 stdin 통해 파이프로 파이프하십시오.
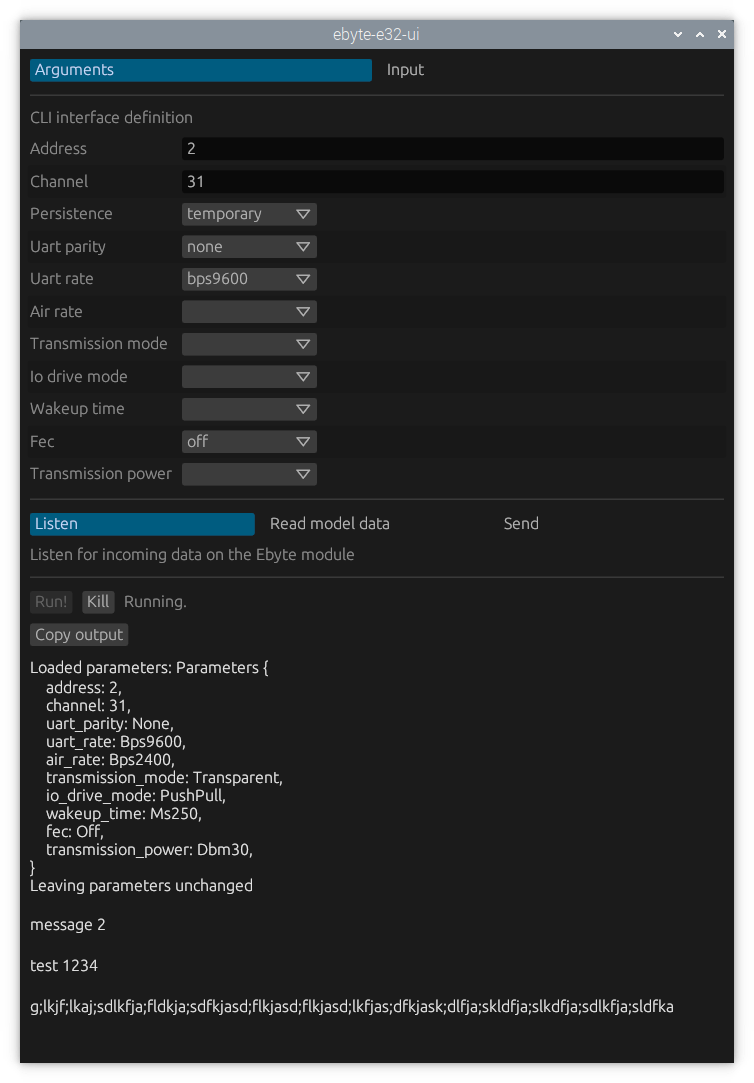
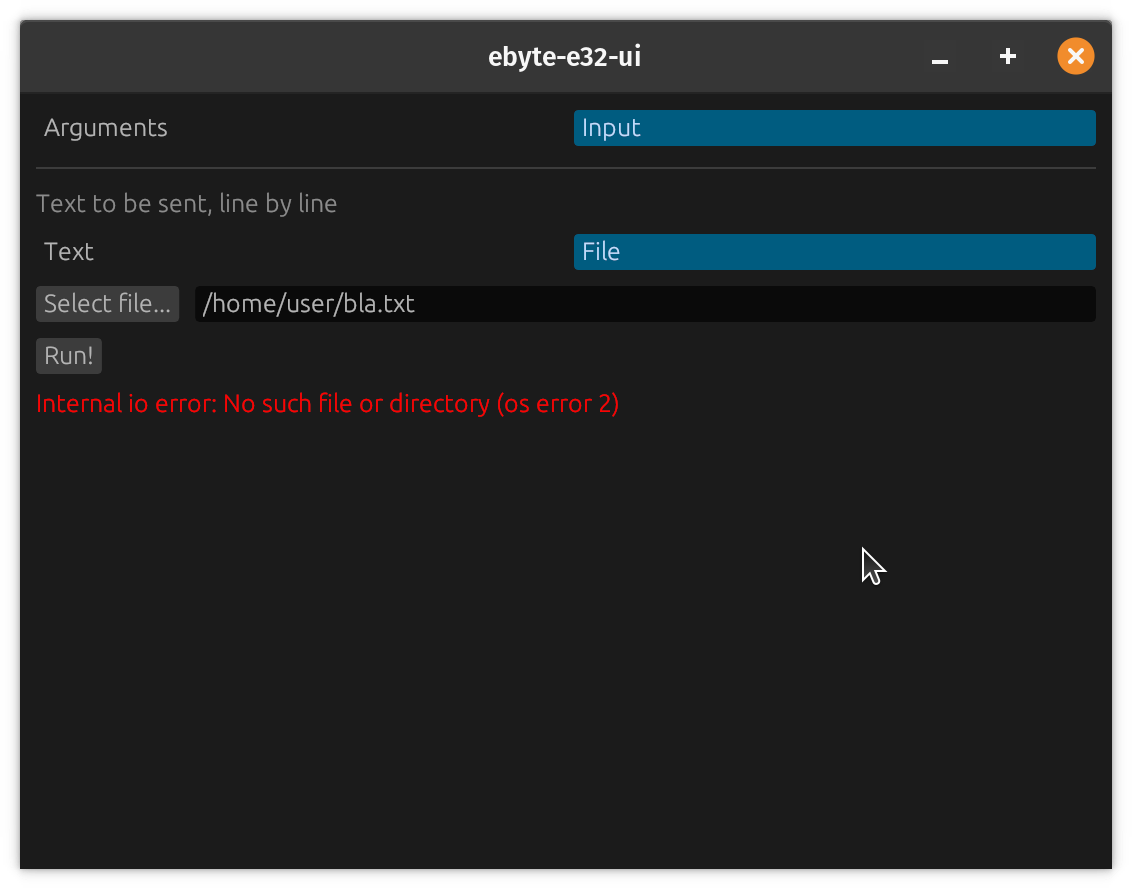
GUI는 기본 대상이므로 cargo run 으로 시작할 수 있습니다. 데이터를 전송하기 위해 Input 탭에 제공된 데이터가 사용됩니다 (여기서 입력을 읽을 파일을 선택할 수도 있음).
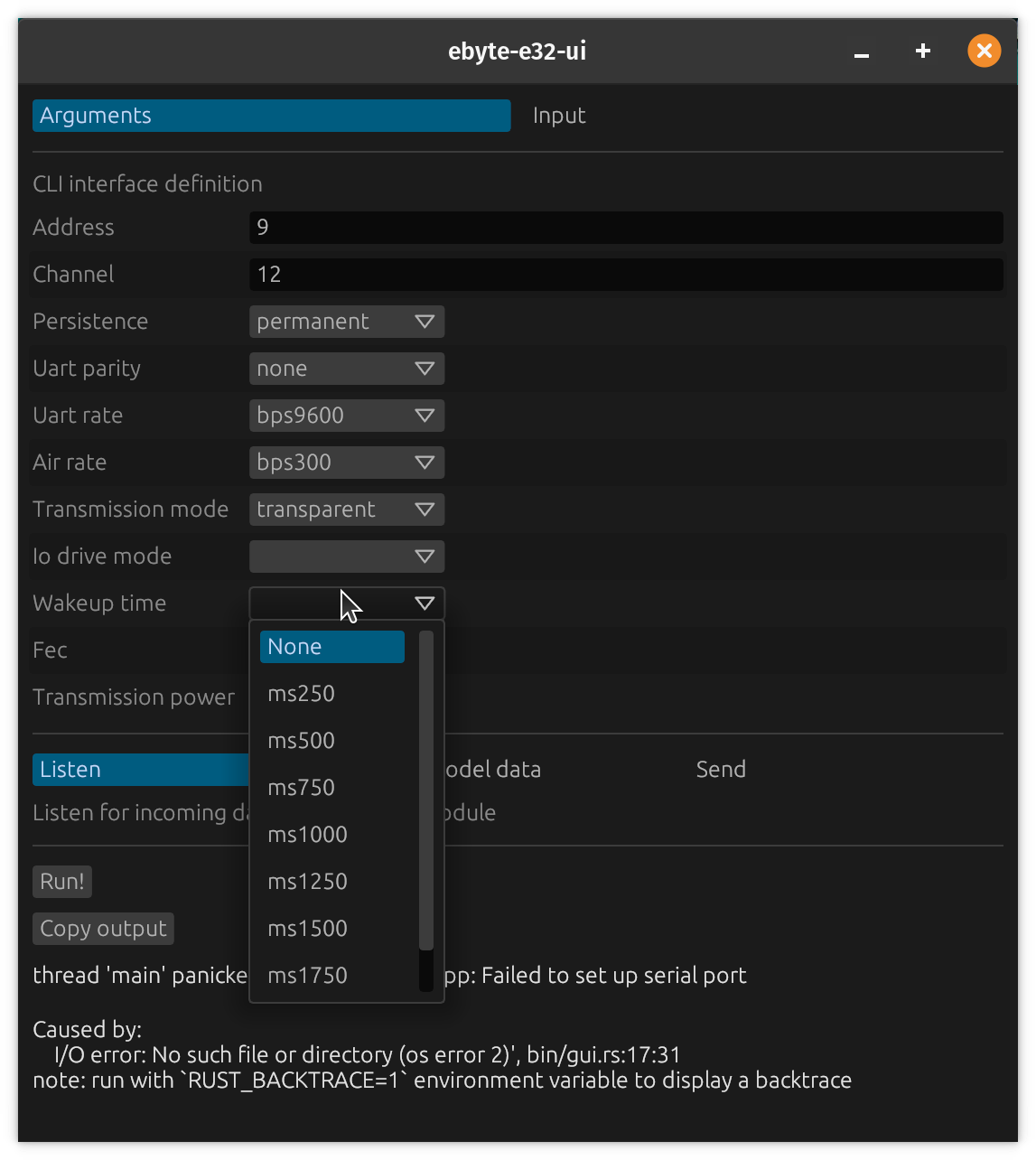
Configuration 부하 명령을 사용하면 모듈 매개 변수를 조정할 수 있습니다. 모듈 설정은 전송이 성공하기 위해 다른 모듈 설정과 일치해야합니다.
Configuration 부부 명령의 persistence 옵션을 사용하면 설정을 저장할 수 있습니다 ( temporary 또는 permanent ). permanent 모드에서는 설정이 모듈에 유지됩니다.
테스트를 위해 일반 OS에서 GUI를 실행할 수 있습니다.
이 스크린 샷은 약간 구식이지만 GUI와 CLI의 기능을 보여줍니다.
기본 드라이버 (EBYTE-E32-RS)는 플랫폼 비석 (Linux가 필요하지 않으며 embedded-hal 의 구현)입니다.
이 프로그램에는 Linux 캐릭터 장치와 3 개의 CDEV GPIO 라인이 필요합니다.
문자 장치의 경우 /dev/ttyABC 로 사용할 수 있어야합니다. (배포에 따라) dialout 같은 직렬 포트를 사용할 수 있도록 특정 그룹에 사용자를 추가해야 할 수도 있습니다.
gpio 라인의 경우 /sys/class/gpio/gpiochipXXX 에서 gpiochipXXX 를 찾은 다음 연결하려는 줄을 찾아 Config.toml 에서 정보를 입력하십시오.
AUX 라인은 입력 라인임을 지원해야하며 M0 및 M1 라인은 출력 라인을 지원해야합니다.
최상위 도움 :
ebyte-e32-ui 0.5.0
CLI + GUI for interacting with EByte E32 LoRa modules
USAGE:
ebyte-e32-cli [OPTIONS] <SUBCOMMAND>
OPTIONS:
--config <CONFIG> Configuration file [default: Config.toml]
-h, --help Print help information
-V, --version Print version information
SUBCOMMANDS:
configure Write Ebyte module parameters
help Print this message or the help of the given subcommand(s)
listen Listen for incoming data on the Ebyte module
read-model-data Read Ebyte module data and print to stdout
read-parameters Read Ebyte module parameters and print to stdout
send Send data from stdin over the Ebyte module
구성 하위 명령 도움말 ( ebyte-e32-cli help configure ) :
ebyte-e32-cli-configure
Write Ebyte module parameters
USAGE:
ebyte-e32-cli configure [OPTIONS] --address <ADDRESS> --channel <CHANNEL>
OPTIONS:
-a, --address <ADDRESS>
Module Address (16 Bit)
--air-rate <AIR_RATE>
Air Baudrate [default: bps2400] [possible values: bps300, bps1200, bps2400, bps4800,
bps9600, bps19200]
-c, --channel <CHANNEL>
Channel (8 Bit)
--fec <FEC>
Forward Error Correction Mode [default: on] [possible values: on, off]
-h, --help
Print help information
--io-drive-mode <IO_DRIVE_MODE>
IO drive Mode for AUX pin [default: push-pull] [possible values: push-pull,
open-collector]
--persistence <PERSISTENCE>
Whether settings should be saved persistently on the module [default: temporary]
[possible values: temporary, permanent]
--transmission-mode <TRANSMISSION_MODE>
Transmission Mode [default: transparent] [possible values: transparent, fixed]
--transmission-power <TRANSMISSION_POWER>
Transmission Power [default: dbm30] [possible values: dbm30, dbm27, dbm24, dbm21]
--uart-parity <UART_PARITY>
UART Parity [default: none] [possible values: none, odd, even]
--uart-rate <UART_RATE>
UART Baudrate [default: bps9600] [possible values: bps1200, bps2400, bps4800, bps9600,
bps19200, bps38400, bps57600, bps115200]
--wakeup-time <WAKEUP_TIME>
Wireless Wakeup Time [default: ms250] [possible values: ms250, ms500, ms750, ms1000,
ms1250, ms1500, ms1750, ms2000]
다른 하위 명령에는 더 이상의 옵션이 없습니다.
직렬 포트 하드웨어 주변 장치는 활성화되어야합니다 (그러나 로그인 쉘없이).



