words2contact
1.0.0
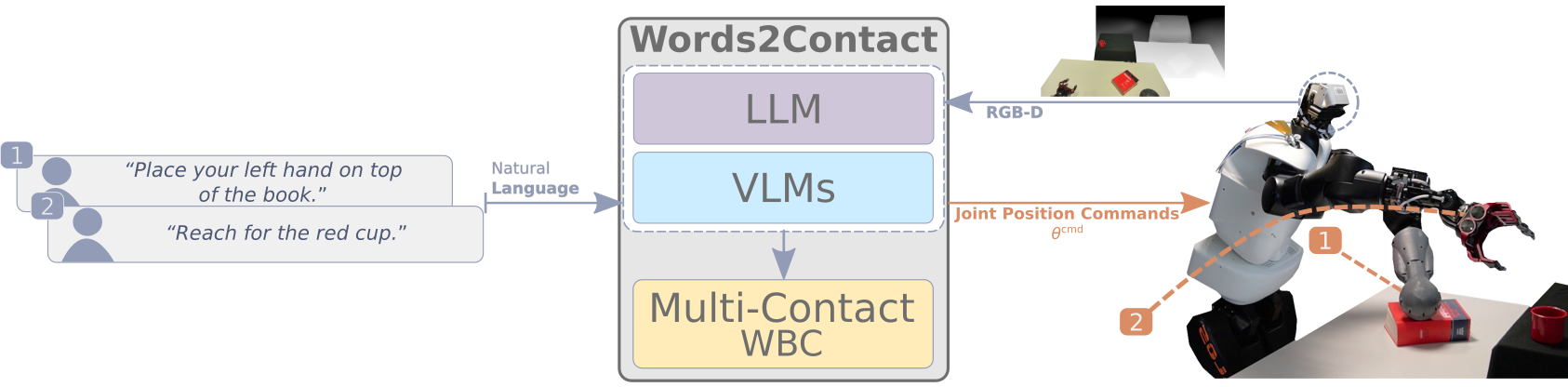
논문의 공식 구현 "Words2Contact : IEEE-RAS Humanoids 2024에 제시된 기초 모델을 사용하여 구두 지침에서 지원 접촉을 식별합니다 .
이 저장소에는 프로젝트의 LLMS/VLMS 부분의 구현이 포함되어 있습니다. 다중 접촉 전신 컨트롤러는이 리포지어를 방문하십시오.
자세한 내용은 논문 웹 사이트를 방문하십시오.
.
├── .ci/ # Docker configurations
│ └── Dockerfile # Dockerfile to build the project's container
├── config/ # Configuration files for models
│ └── GroundingDINO_SwinT_OGC.py # GroundingDINO configuration
├── data/ # Test data and outputs
│ ├── test.png # Example input image
│ └── test_output.png # Example output image
├── media/ # Media assets
│ ├── ack.png # Acknowledgment image
│ └── concept_figure_wide.png # Conceptual figure for the project
├── submodules/ # External submodules
│ └── CLIP_Surgery/ # CLIP Surgery code and resources
├── words2contact/ # Core project source code
│ ├── grammar/ # Grammars for constraining language models
│ │ ├── classifier.gbnf # Grammar for classifying outputs
│ │ └── README.md # Grammar module documentation
│ ├── prompts/ # Prompts for LLMs
│ │ └── prompts.json # JSON file with pre-defined prompts
│ ├── geom_utils.py # Utilities for geometric calculations
│ ├── math_pars.py # Parsing mathematical expressions
│ ├── saygment.py # Language-grounded segmentation
│ ├── words2contacts.py # Core script for Words2Contact
│ └── yello.py # Language-grounded object detection
├── main.py # Entry point for the project
├── launch.sh # Docker launch script
├── object_detection.py # Object detection testing
├── object_segmentation.py # Object segmentation testing
└── README.md # Documentation (this file)
시작하기 전에 다음과 같은 사항을 확인하십시오.
현재 Docker 만 지원되며 Conda 및 PIP 설치가 곧 추가 될 예정입니다.
저장소 복제 :
git clone https://github.com/hucebot/words2contact.git
cd words2contactDocker 이미지 구축 :
docker build -t words2contact -f .ci/Dockerfile . OpenAI의 GPT 기반 LLM을 사용하려는 경우 Docker 컨테이너를 시작하기 전에 API 키를 환경 변수로 설정하십시오.
export OPENAI_KEY= < your_openai_api_key >컨테이너를 시작하려면 다음 명령을 실행하십시오.
bash launch.sh 이렇게하면 모델이 다운로드 및 저장 될 프로젝트의 루트에 models/ 폴더가 생성됩니다.
제공된 예제 이미지와 관련하여 Words2Contact를 테스트하려면 :
python main.py --image_path data/test.png --prompt " Place your hand above the red bowl. " 출력은 data/test_output.png 로 저장됩니다.
더 많은 예가 곧 올 것입니다!
usage: main.py [-h] [--image_path IMAGE_PATH] [--prompt PROMPT] [--use_gpt] [--yello_vlm YELLO_VLM] [--output_path OUTPUT_PATH] [--llm_path LLM_PATH] [--chat_template CHAT_TEMPLATE]
Run Words2Contact with an image and a text prompt.
options:
-h, --help show this help message and exit
--image_path IMAGE_PATH Path to the input image file. Default: 'data/test.png'.
--prompt PROMPT Text prompt for Words2Contact. Default: 'Place your hand above the red bowl.'.
--use_gpt Use OpenAI API for the LLM (requires `OPENAI_KEY`).
--yello_vlm YELLO_VLM Model to use for YELLO VLM. Default: 'GroundingDINO'.
--output_path OUTPUT_PATH Path to save the output image. Default: 'data/test_output.png'.
--llm_path LLM_PATH Path to the `.gguf` LLM model weights.
--chat_template CHAT_TEMPLATE Chat template to use for local LLMs. Default: 'ChatML'.
.gguf 가중치를 다운로드하십시오.models/ 폴더에 배치하십시오.--llm_path 인수를 지정하십시오. python main.py --image_path data/test.png --llm_path models/local_model.gguf질문이나 지원은 다음과 같이 문의하십시오.
연구에서 Words2Contact, 당사 데이터 세트 또는이 코드의 일부를 사용하는 경우, 논문을 인용하십시오.
@INPROCEEDINGS { 10769902 ,
author = { Totsila, Dionis and Rouxel, Quentin and Mouret, Jean-Baptiste and Ivaldi, Serena } ,
booktitle = { 2024 IEEE-RAS 23rd International Conference on Humanoid Robots (Humanoids) } ,
title = { Words2Contact: Identifying Support Contacts from Verbal Instructions Using Foundation Models } ,
year = { 2024 } ,
volume = { } ,
number = { } ,
pages = { 9-16 } ,
keywords = { Accuracy;Large language models;Pipelines;Natural languages;Humanoid robots;Transforms;Benchmark testing;Iterative methods;Surface treatment } ,
doi = { 10.1109/Humanoids58906.2024.10769902 } }이 연구는 다음과 같이 뒷받침되었습니다.



