Lazuli
1.0.0
Lazuli는 AVR 마이크로 컨트롤러를 대상으로 선제 적 멀티 태스킹 RTO (실시간 운영 체제/커널)입니다. AVR 마이크로 컨트롤러의 실시간 컨텍스트에서 여러 독립 작업을 프로그래밍하고 실행할 수 있습니다. 기본 구성에서 Lazuli RTO는 메모리 발자국이 낮습니다 (<4 킬로바이트의 ROM, <200 바이트의 정적 RAM). Lazuli RTO는 최소한의 하드웨어에서 실시간 제약 조건이 강하거나 멀티 태스킹을 요구하는 임베디드 애플리케이션 또는 단지를 개발하는 데 사용될 수 있습니다.
AVR MCU는 임베디드, 산업용 장치 및 응용 분야에서 널리 사용되며 Arduino 보드에서도 사용되는 것으로 알려져 있습니다. Lazuli RTOS 위에 작성된 응용 프로그램은 산업 시스템 및 애호가 창작물에 적합합니다.
Lazuli RTO는 소스 코드 형식으로 분산되어 최종 실행 파일과 구축 및 정적으로 연결됩니다. 이를 통해 커널을 정적으로 구성하고 컴파일러 최적화의 이점을 얻을 수 있습니다.
이 프로젝트는 https://github.com/randruc/lazuli (https://github.com/randruc/lazuli)에서 개최됩니다
현재 Lazuli 커널은 다음과 같은 기능을 제공합니다.
SCHED_RR )printf() 구현을 포함한 AVR USART 드라이버Lazuli 프로젝트는 매우 구체적인 목표를 가지고있어 독특합니다. 이들은 다음과 같습니다.
Lazuli RTO는 현재 ATMEGA328P MCU (Arduino에서 사용)에서 실행되지만 다른 AVR 플랫폼에서 쉽게 휴대 할 수 있어야합니다.
Lazuli는 높은 수준의 코드 품질과 안정성에 도달하는 경향이 있지만, 특정 용도로 인증되지 않았기 때문에 안전 크리티컬 시스템에 적합 하지 않습니다 . 안전 비판 시스템에 대한 자세한 내용은 https://en.wikipedia.org/wiki/safety-critical_system을 참조하십시오.
프로젝트에 대한 문서는 https://lazuli.readthedocs.io/en/latest/에서 읽을 수 있습니다.
API 문서는 https://randruc.github.io/lazuli/doxygen/latest/에서 읽을 수 있습니다.
프로젝트를 문서화하는 데 두 가지 도구가 사용됩니다.
sphinx PreatucturedText로 작성된 파일에서 사용자 문서를 생성합니다. 소스는 문서/ 디렉토리에 있습니다.doxygen . Lazuli RTO를 사용하는 예제 프로그램은 디렉토리 예제 프로그램/에서 찾을 수 있습니다.
다음은 클래식 깜박임 LED가 표시됩니다. 임베디드 시스템의 안녕하세요 세계 . Lazuli API에 대한 소개 역할을하는 것은 크게 언급되어 있습니다.
#include <stdint.h>
#include <Lazuli/lazuli.h>
#include <Lazuli/sys/arch/AVR/registers.h>
/*
* This is the Blink task. It simply blinks the built-in LED on Arduino
* platforms.
* This task is scheduled in real-time. It is configured to blink with an exact
* period of 1 second.
*/
void
Blink ()
{
/* On the Arduino, this pin corresponds to the built-in LED */
const uint8_t ledPin = 0x20 ;
DDRB |= ledPin ; /* Set the pin to be an output pin */
PORTB &= ~ ledPin ; /* The initial state of the pin will be 0 */
/* Now this is the main loop of this task */
for (;;) {
/* Wait for the next real-time activation of the task */
Lz_Task_WaitActivation ();
PINB |= ledPin ; /* Toggle the pin */
}
}
void
main ( void )
{
/* Allocate a configuration object on the stack */
Lz_TaskConfiguration configuration ;
/* Initialize the configuration object with default values */
Lz_TaskConfiguration_Init ( & configuration );
/* Configure the Blink task to be cyclic real-time (RMS scheduling) */
configuration . schedulingPolicy = CYCLIC_RT ;
/* The Blink task has a period of 25 time slices. */
/* Our platform has a 16 MHz clock, and the system clock resolution */
/* frequency is configured to 50 Hz. This is an arbitrary value that */
/* can be configured by the user. */
/* With a system clock resolution frequency set to 50 Hz, the system */
/* clock period is then 1 / 50 = 0.02 second. */
/* So 0.02 * 25 = 0.5 second, which corresponds to the half period */
/* of our task. */
configuration . period = 25 ;
/* The Blink task has a completion of 10 time slices (arbitrary here */
/* because our task does almost nothing). */
configuration . completion = 10 ;
/* Register the Blink task to run with the parameters above */
Lz_RegisterTask ( Blink , & configuration );
/* Run the system */
Lz_Run ();
}Lazuli는 다른 기존 코드에 의존하지 않습니다. 당신은 단순히 자신의 코드를 작성하고 시스템을 구축하고 대상 MCU에 업로드하면 실행할 수 있습니다!
Lazuli와 함께 개발하려면 Lazuli Docker 이미지를 사용하는 것이 좋습니다. 필요한 모든 도구가 제공되는 완전한 개발 환경의 혜택을 누릴 수 있습니다.
Lazuli RTO에는 Docker 이미지로 제공되는 완전하고 컨테이너화 된 개발 환경이 제공됩니다. 이 이미지에는 Lazuli RTO를 사용하여 자체 프로젝트를 구축하는 데 필요한 모든 도구가 포함되어 있습니다. 컴파일러 및 링커, 빌드 도구, 이진 유틸리티, 사람 페이지 등이 포함됩니다.
공식 Lazuli Docker 이미지는 https://hub.docker.com/r/randruc/lazuli에서 가져올 수 있습니다.
공식 문서에서 개발 환경을 설정하는 방법에 대해 자세히 알아보십시오 : https://lazuli.readthedocs.io/en/latest/set_up_environment.html
 Lazuli 개발 환경 컨테이너 시작
Lazuli 개발 환경 컨테이너 시작
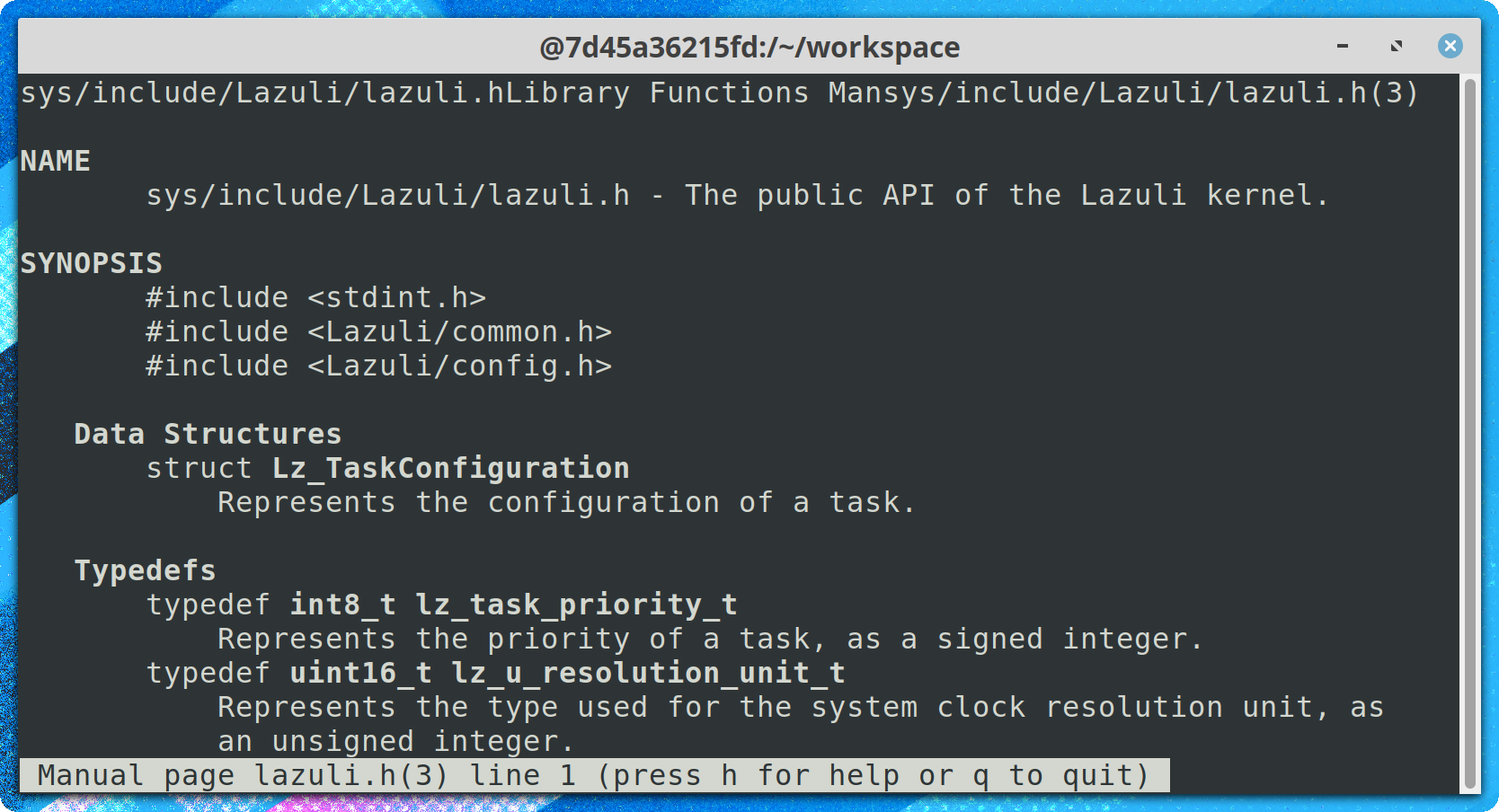 Lazuli 개발 환경 컨테이너의 사람 페이지
Lazuli 개발 환경 컨테이너의 사람 페이지
Lazuli 커널은 완전히 구성 가능합니다. 빌드 시스템은 CMAKE에 의존합니다. ccmake 의 도움으로 구성은 콘솔에서 대화식으로 수행 할 수도 있습니다.
공식 문서에서 자세히 알아보십시오 : https://lazuli.readthedocs.io/en/latest/developing_your_project.html
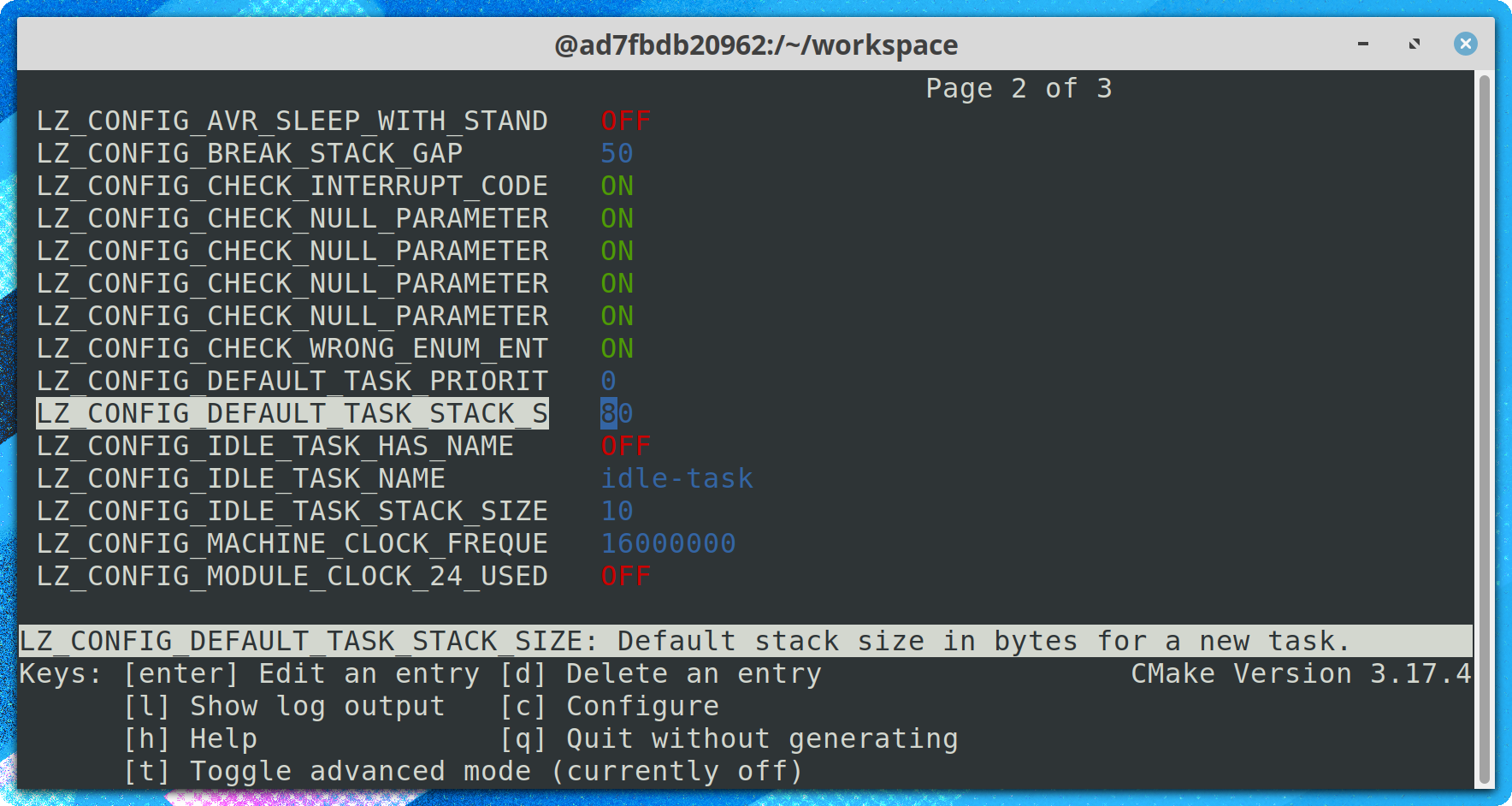 CCMAKE를 사용한 구성
CCMAKE를 사용한 구성
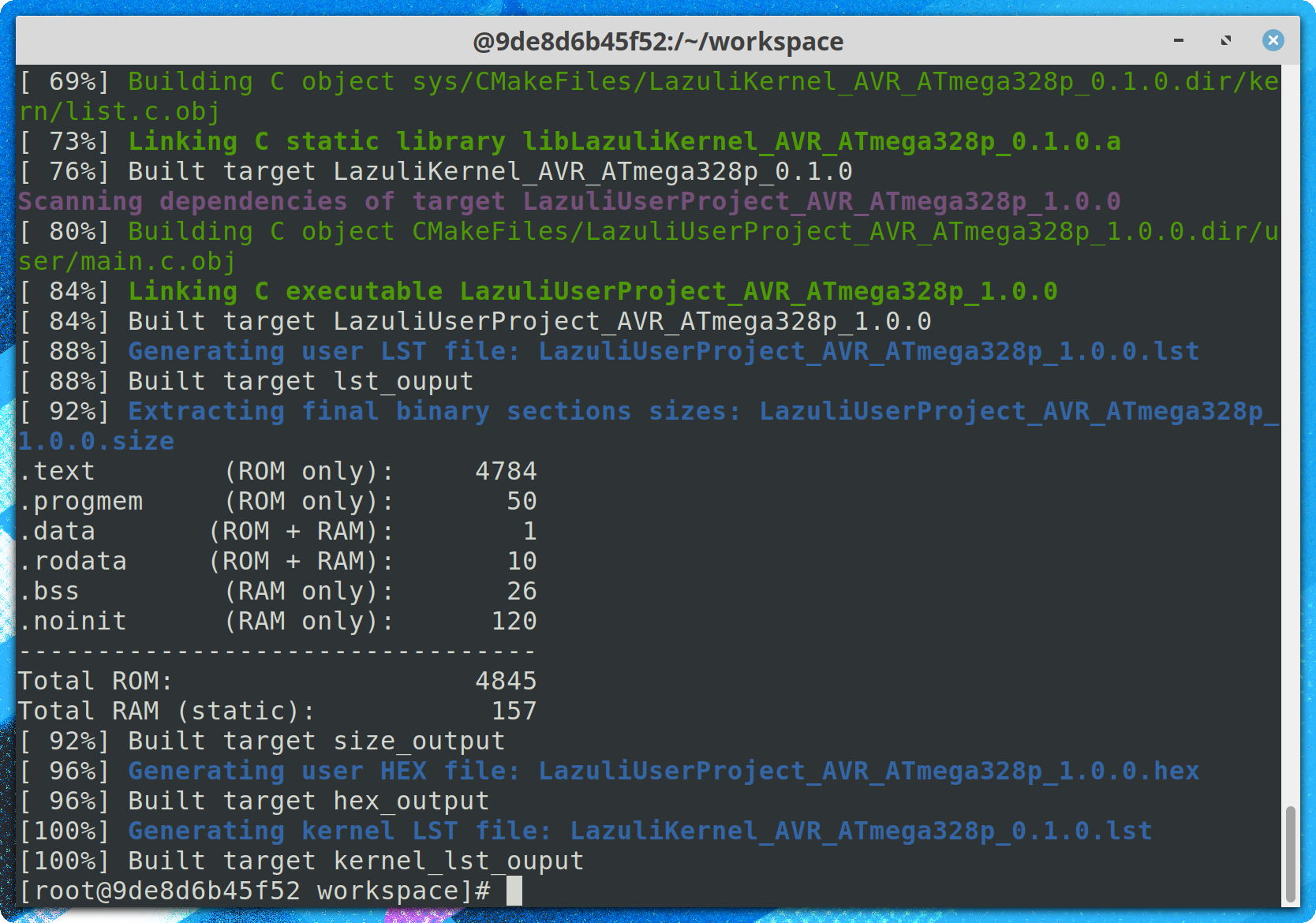 cmake를 사용하여 건물
cmake를 사용하여 건물
AVR MCU에서 avrdude 사용하여 최종 바이너리를 대상 기계에 업로드 할 수 있습니다. 스크립트 스크립트/avr/upload.sh를 사용할 수 있습니다. 16 진 파일을 매개 변수로 사용합니다.
일련 라인과의 상호 작용은 GNU screen 사용하여 수행 할 수 있습니다. 스크립트 스크립트/Serial.sh는 USB 직렬 라인과 상호 작용하는 데 사용될 수 있습니다.
프로젝트의 Issues 탭 (https://github.com/randruc/lazuli/issues)을 사용하여 문제 해결을보고하거나 제안을해야합니다.
기부금을 환영합니다!
이 프로젝트는 github (https://github.com/randruc/lazuli)에서 호스팅되며 Github는 모든 것을 관리하는 데 사용됩니다 : 풀 요청, 문제 등 등. 버그를 고치거나 새로운 기능을 구현하거나 제안하거나 오타/철자를 수정하려는 경우에는 중요하지 않습니다 .
공식 문서에 기여하는 방법에 대해 자세히 알아보십시오 : https://lazuli.readthedocs.io/en/latest/kernel/contributing.html
프로젝트의 Issues 탭을 사용하여 질문을하고 코딩없이 기능을 제안하거나 원하는 것을 제안 할 수 있습니다!
모든 프로젝트는 GNU General Public License v3.0에 의해서만 배포됩니다. 이 라이센스의 전체 사본은 파일 라이센스/gpl-3.0 only.txt에서 사용할 수 있습니다.


