loraE22
1.0.0
EbyteE22シリーズLORAモジュールのMicropythonクラス
サポートされているEBYTE E22モジュールは、SemTech SX1262/SX1286チップセットに基づいており、400 MHz(410.125 ... 493.125)および900 MHz(850.125 ... 930.125)の周波数範囲で利用でき、22 DBM MAXを提供します。 TXパワー。
デバイスの制御には、単純なUARTインターフェイスが使用されます。
ebyteデータシート:
E22-900T22D
E22-400T22D
lorae22クラスは、effeveeによるlorae32クラスに基づいています:https://github.com/effevee/lorae32
送信する前に適切なアンテナを接続します!
使用する前に、この周波数範囲を使用するためにローカルの規制を確認してください。たとえば、ヨーロッパのほとんどでは、最大許容されるTX電源は22 dBmのデフォルト値を下回っています!また、追加の制限がある場合があります。たとえば、送信のデューティサイクルの制限(つまり、デバイスの使用期間中に範囲の合計時間までの放送時間の割合です)!
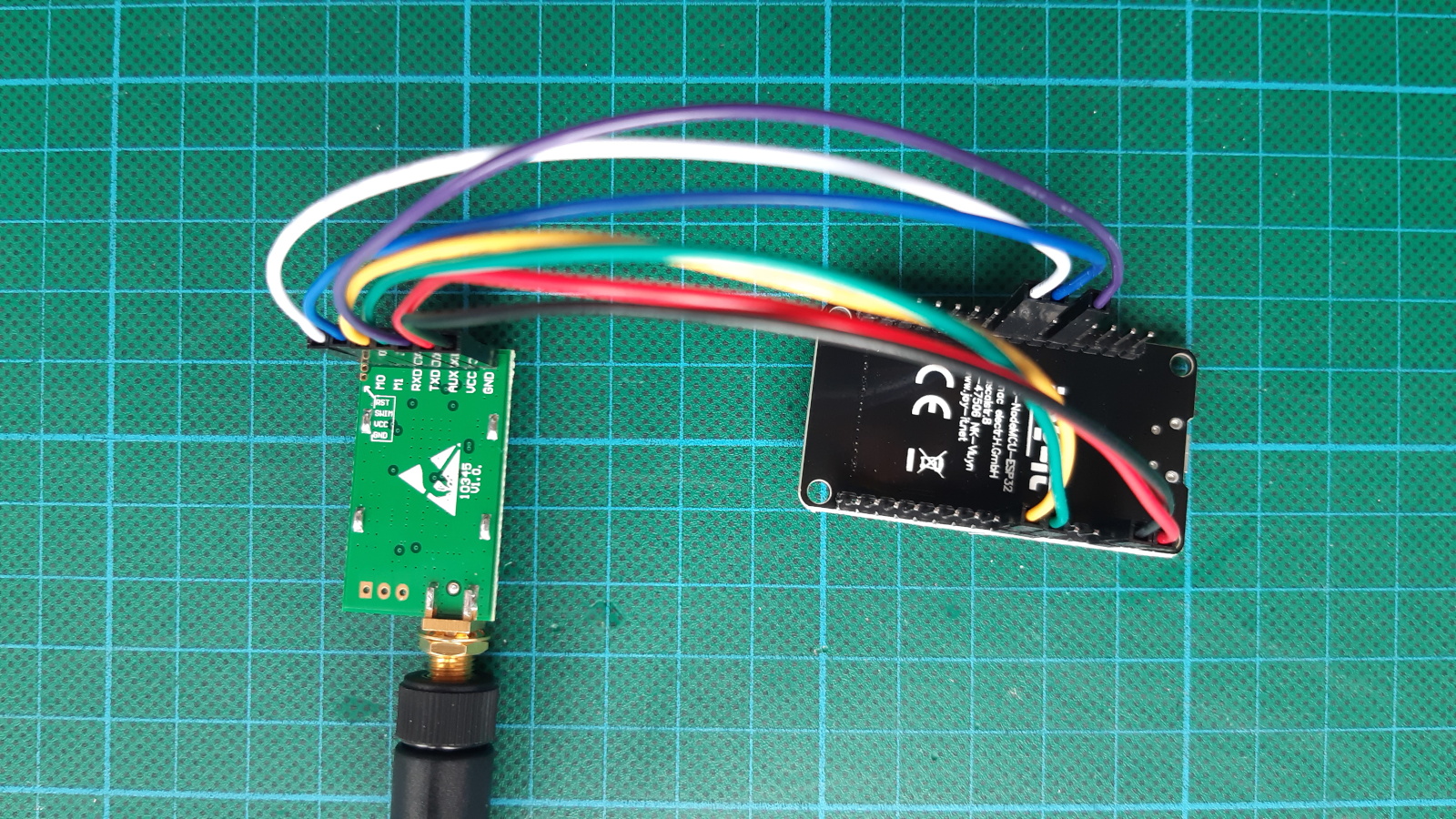
ピン構成についてはコードを参照してください。
注: lorae22テストコードは、使用済みのUARTおよびAUXピンに関してE32テストコードとは異なります!さらに、lorae22は「通常モード」を使用し、lorae32はsendmessage()で「ウェイクアップモード」を使用します。
| 送信モード | TX(addr -ch) | rx(addr -ch) | msg(addr -ch) | 送信機コード | 受信コード |
|---|---|---|---|---|---|
| 透明 | 0x0001-0x02 | 0x0001-0x02 | 0x0001-0x02 | testsende22_transparent.py | testrecve22_transparent.py |
| P2Pを修正しました | 0x0001-0x02 | 0x0003-0x04 | 0x0003-0x04 | testsende22_p2p.py | testRecve22_p2p.py |
| ブロードキャストを修正しました | 0x0001-0x02 | 0x0003-0x04 | 0xffff -0x04 | testsende22_broadcast.py | testrecve22_broadcast.py |
| 修正されたモニター | 0x0001-0x02 | 0xffff -0x04 | 0x0003-0x04 | testsende22_monitor.py | testrecve22_monitor.py |
各ノードは、プッシュボタンの状態に応じてLED制御値を含む固定間隔でメッセージを送信します。
その後、受信したメッセージをチェックします。 LED制御値を持つメッセージが利用可能な場合、LEDはそれに応じて切り替えられます。
ローカルノードとピアノードの送信モード(アドレス/チャネル構成)は、配列ADDRおよびCHANで必要に応じて設定できます。
node0.pyとnode1.pyのコードは、変数の設定を除いて同一です。
| node0 | node1 |
|---|---|
| node0.py | node1.py |
LORA送信機は、固定間隔でチップIDとメッセージシーケンス番号を含む文字列を送信します。
LORAレシーバーは、<timestamp>、<latitude>、<utsitude>、<altitude>、<rssi>を事前に定義された間隔で印刷します。
受信機の位置とタイムスタンプは、GPSレシーバーからUARTを介して受信したNMEAメッセージからデコードされています。この目的のために、マイクロパイグが使用されます。
利用可能な場合、着信LORAメッセージは、別のUARTを介してebytee22 loraトランシーバーモジュールから受信されます。 LORAトランスミッターから予想されるメッセージを特定の時間受信できなかった場合、-255 dBMのRSSI値が想定されており、LORA無線リンクの損失を示しています。
tuple <timestamp>、<latitude>、<turcitude>、<Altitude>、<rssi>が印刷され、有効な位置が利用可能な場合にのみ、オプションでログファイルに書き込まれます。
ロギングが有効になっている場合、フォーマットlog_ <8_random_hex_digits _>ログファイルは、Micropythonの内部ファイルシステムに書き込まれます。キーを押すことでロギングを明示的に停止する必要があります。そうしないと、ファイルを適切に閉じることができず、破損/空になります。
2つのLEDは、それぞれGPS修正の状態とLORAリンクを示します。
| 送信機ノード | 受信ノード |
|---|---|
| lora_tx.py | lora_rssi_logger.py |
ログファイルは、後でホストでCSV -Formatから適切な形式(GPXやKMLなど)に変換できます。 rssi_csv_to_kml.pyを参照-KML出力ファイルは、GoogleEarthの標高プロットで表示される拡張データとしてRSSI値を提供します。 (使用法: rssi_csv_to_kml.py log_deadbeef.csv >log_deadbeef.kml )
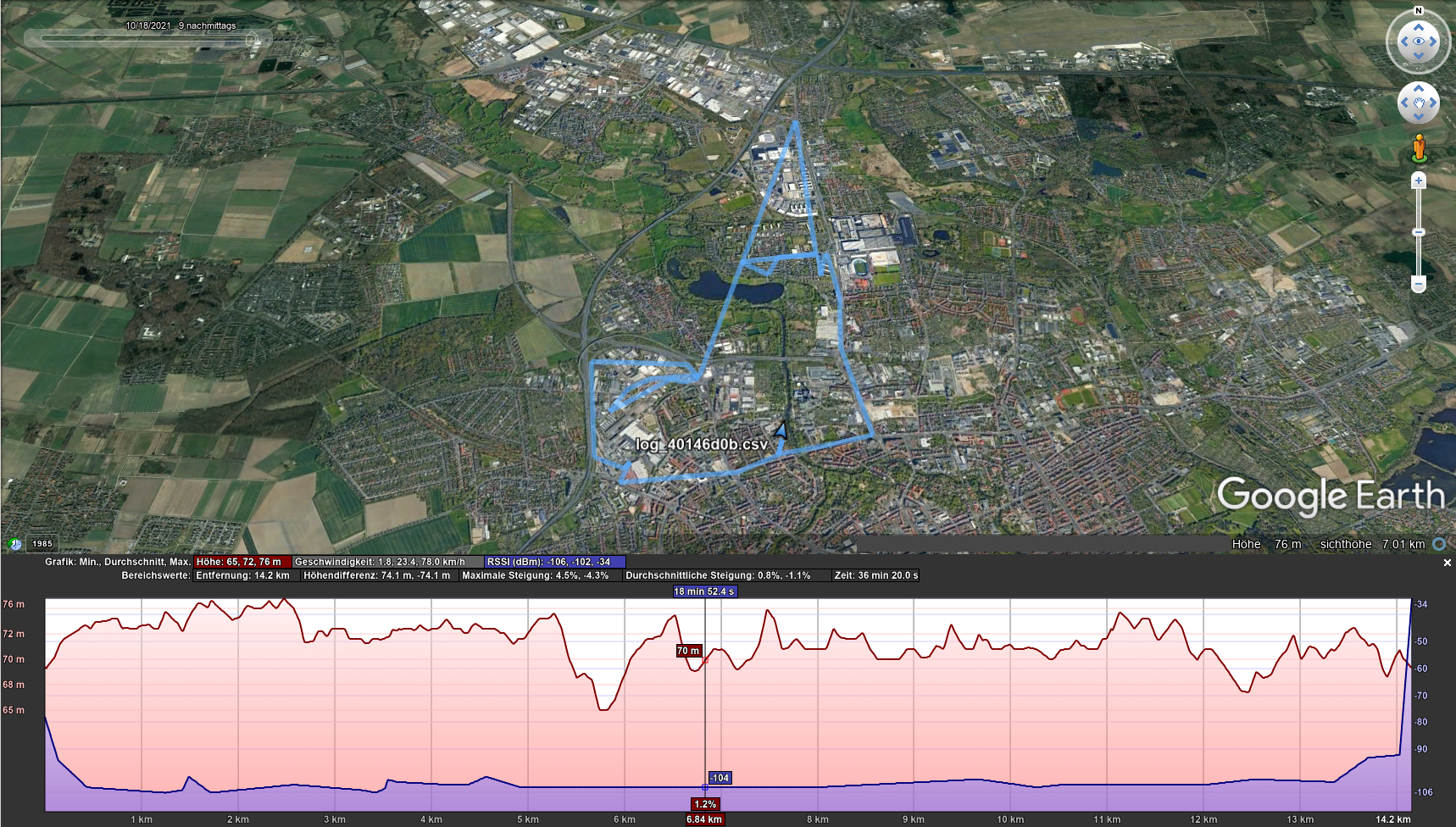 注:プロットは例として機能します - ロギング間隔はより短く、ロギング戦略がその後変更されたはずです。
注:プロットは例として機能します - ロギング間隔はより短く、ロギング戦略がその後変更されたはずです。


