loraE22
1.0.0
Una clase de micryphon para los módulos Lora de la serie Ebyte E22
Los módulos EByte E22 compatibles se basan en los conjuntos de chips Semtech SX1262/SX1286 y están disponibles para los rangos de frecuencia de 400 MHz (410.125 ... 493.125) y 900 MHz (850.125 ... 930.125) y proporcionan 22 dBM MAX. TX Power.
Se utiliza una interfaz UART simple para controlar el dispositivo.
Hojas de datos de ebyte:
E22-900T22D
E22-400T22D
La clase Lorae22 se basa en la clase Lorae32 por Effevee: https://github.com/effevee/lorae32
¡Conecte la antena adecuada antes de transmitir!
Antes de usar, consulte sus regulaciones locales para usar este rango de frecuencia. ¡Por ejemplo, en la mayor parte de Europa, la potencia TX máxima permitida está por debajo del valor predeterminado de 22 dBm! ¡También puede haber restricciones adicionales, por ejemplo, restricciones en el ciclo de trabajo de sus transmisiones (es decir, la fracción del tiempo del aire hasta el tiempo total abarcado durante un período de uso del dispositivo)!
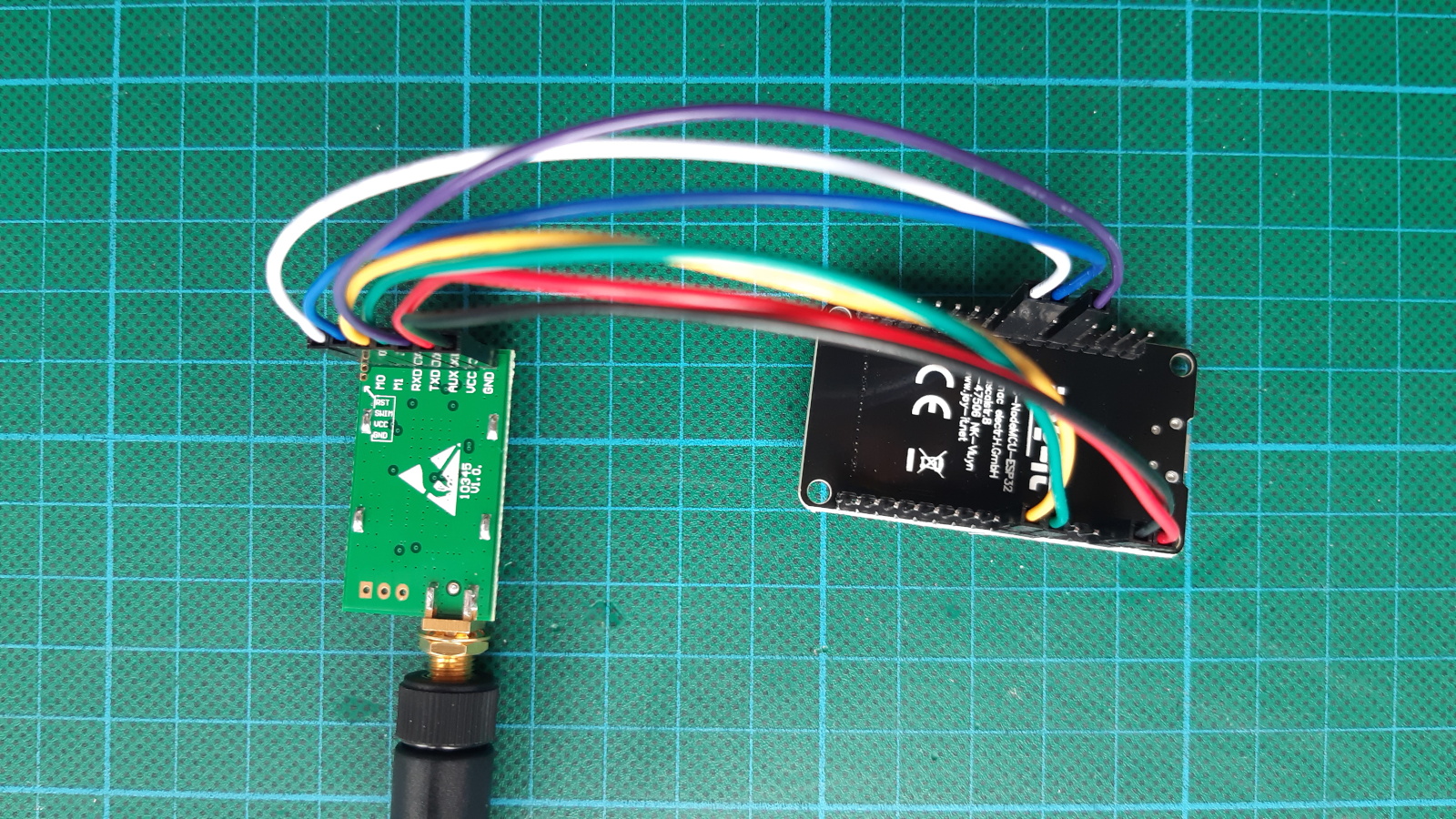
Consulte el código para la configuración de PIN.
Notas: ¡El código de prueba Lorae22 difiere del código de prueba E32 en términos de PIN UART y AUX usado! Además, Lorae22 usa 'modo normal', mientras que Lorae32 usa 'modo de atención' en sendMessage () .
| Modo de transmisión | TX (ADDR - CH) | RX (ADDR - CH) | MSG (ADDR - CH) | Código transmisor | Código receptor |
|---|---|---|---|---|---|
| transparente | 0x0001 - 0x02 | 0x0001 - 0x02 | 0x0001 - 0x02 | testSende22_transparent.py | testRecve22_transparent.py |
| P2P fijo | 0x0001 - 0x02 | 0x0003 - 0x04 | 0x0003 - 0x04 | testSende22_p2p.py | testRecve22_p2p.py |
| transmisión fija | 0x0001 - 0x02 | 0x0003 - 0x04 | 0xffff - 0x04 | testSende22_broadcast.py | testRecve22_broadcast.py |
| monitor fijo | 0x0001 - 0x02 | 0xffff - 0x04 | 0x0003 - 0x04 | testSende22_monitor.py | testrecve22_monitor.py |
Cada nodo envía un mensaje a un intervalo fijo que contiene un valor de control LED de acuerdo con el estado de un botón Push.
Luego verifica los mensajes recibidos. Si hay un mensaje con el valor de control del LED disponible, el LED se cambia en consecuencia.
El modo de transmisión (configuración de dirección/canal) para el nodo local y el nodo par se puede establecer como se desea en las matrices ADDR y Chan .
El código de node0.py y node1.py es idéntico, excepto la configuración de las variables yo y el par .
| Nodo0 | Nodo1 |
|---|---|
| nodo0.py | nodo1.py |
El transmisor Lora envía una cadena que contiene su ID de chip y un número de secuencia de mensaje a un intervalo fijo.
El receptor de Lora imprime/registra <Timestamp>, <Tlatitude>, <Longitude>, <altitude>, <RSSI> en un intervalo predefinido.
La posición del receptor y una marca de tiempo se decodifican de los mensajes NMEA recibidos a través de UART de un receptor GPS. Para este propósito, se usa MicropyGPS.
Si está disponible, se reciben mensajes de Lora entrantes del módulo transceptor EBYTEE22 Lora a través de otro UART. Si los mensajes esperados del transmisor Lora no pudieran recibirse por cierto tiempo, se supone un valor RSSI de -255 dBm, lo que indica la pérdida del enlace de radio Lora.
La tuple <Timestamp>, <Latitude>, <Rongitude>, <Altitude>, <RSSI> se imprime y opcionalmente se escribe en un archivo de registro solo si hay una posición válida disponible.
Si el registro está habilitado, un nombre de archivo en el formato log_ <8_random_hex_digits _>. CSV se crea después de encender o reiniciar. Los archivos de registro se escriben en el sistema de archivos interno de Micopython. El registro debe detenerse explícitamente presionando una tecla, de lo contrario, el archivo no se puede cerrar correctamente y estará corrupto/vacío.
Dos LED indican el estado de la solución GPS y el enlace Lora, respectivamente.
| Nodo transmisor | Nodo receptor |
|---|---|
| lora_tx.py | lora_rssi_logger.py |
Los archivos de registro se pueden convertir de CSV -formato a un formato adecuado, como GPX o KML, en el host más adelante. Consulte RSSI_CSV_TO_KML.PY: el archivo de salida KML proporciona el valor RSSI como datos extendidos que se mostrarán con el gráfico de elevación en GoogleEarth. (Uso: rssi_csv_to_kml.py log_deadbeef.csv >log_deadbeef.kml )
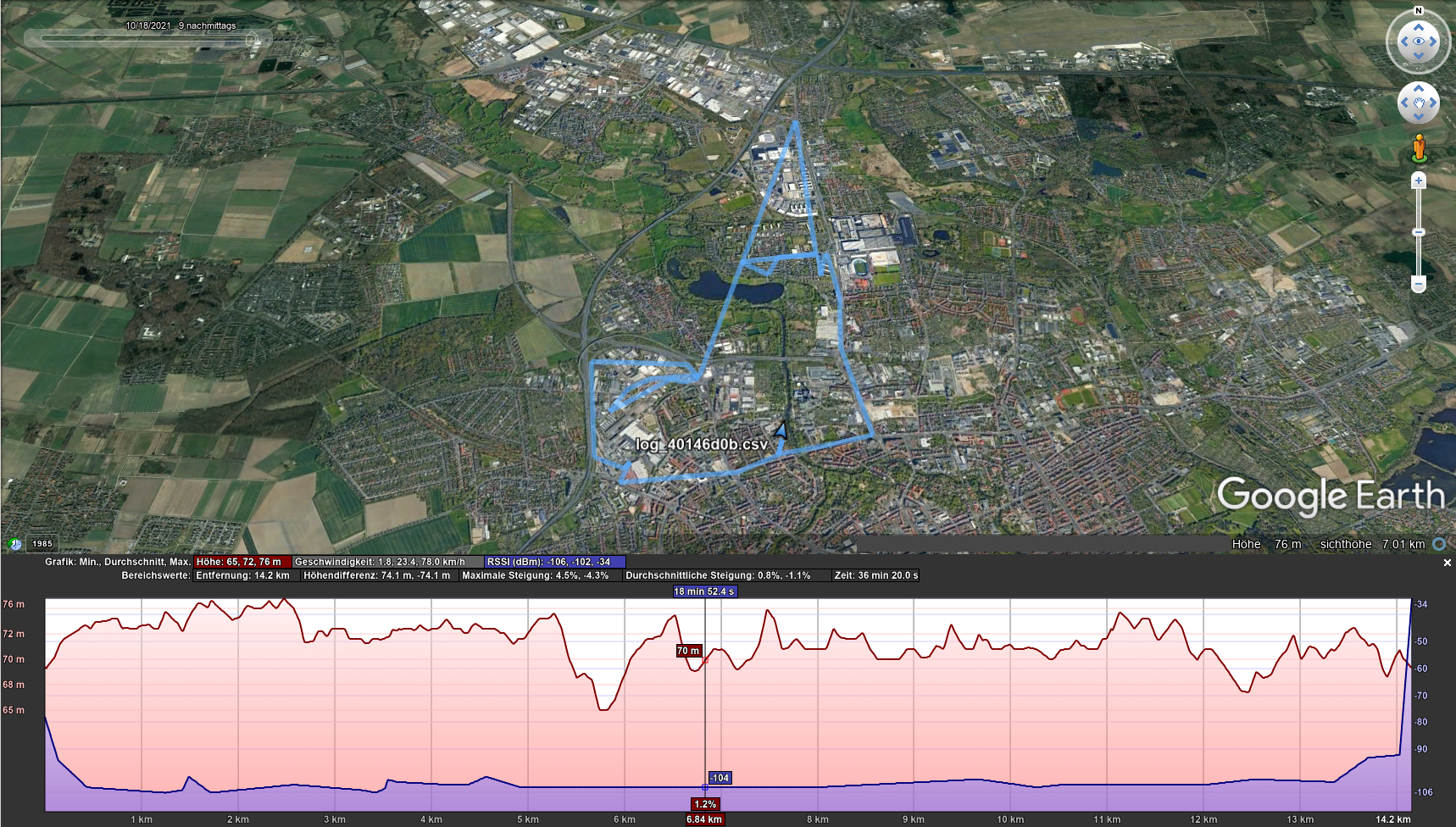 Nota: El gráfico simplemente sirve como ejemplo: el intervalo de registro debería haber sido más corto y la estrategia de registro se ha modificado después.
Nota: El gráfico simplemente sirve como ejemplo: el intervalo de registro debería haber sido más corto y la estrategia de registro se ha modificado después.


