Parking_Application
1.0.0
Departamento de Ingeniería de Software - Proyecto de licenciatura en la Universidad de Lakehead
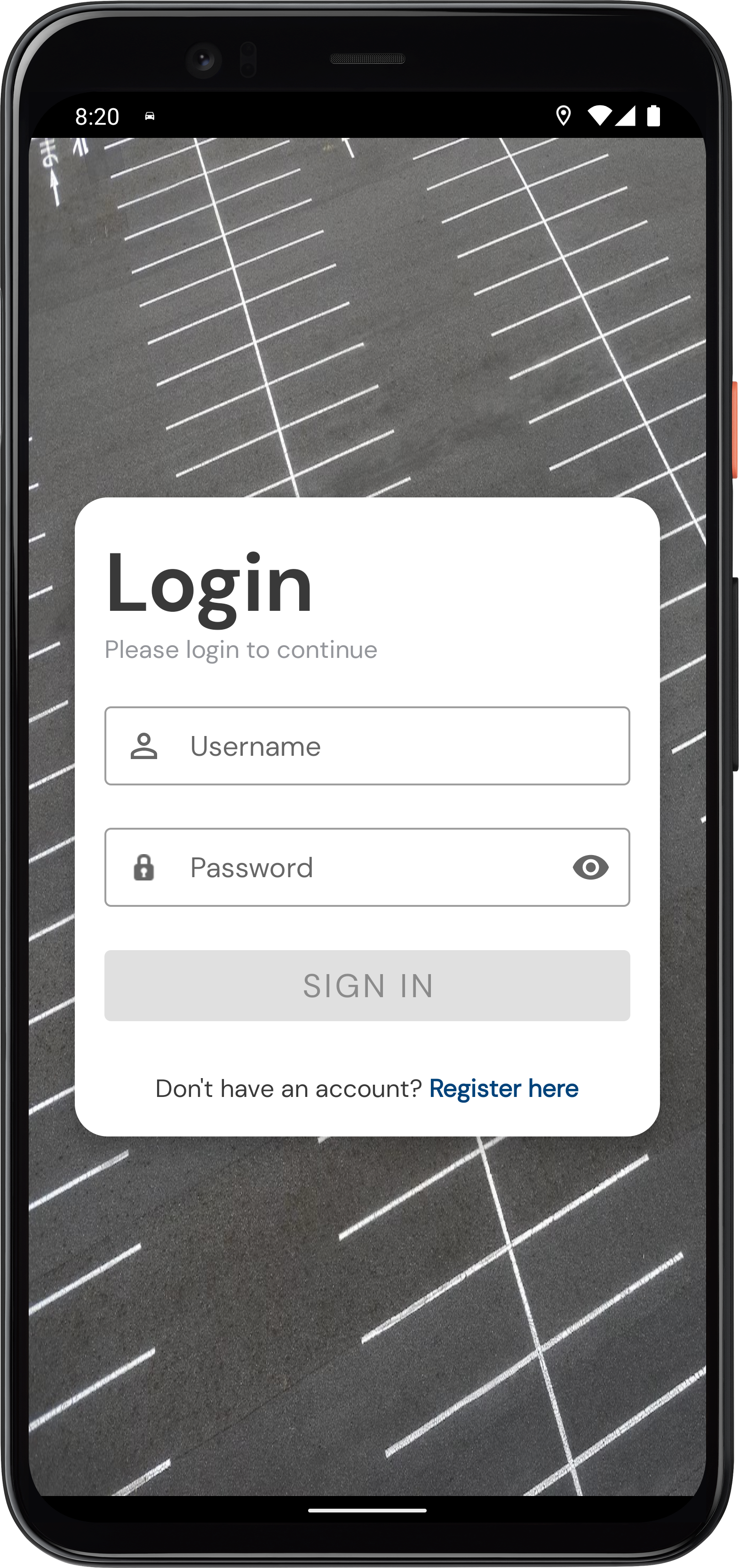
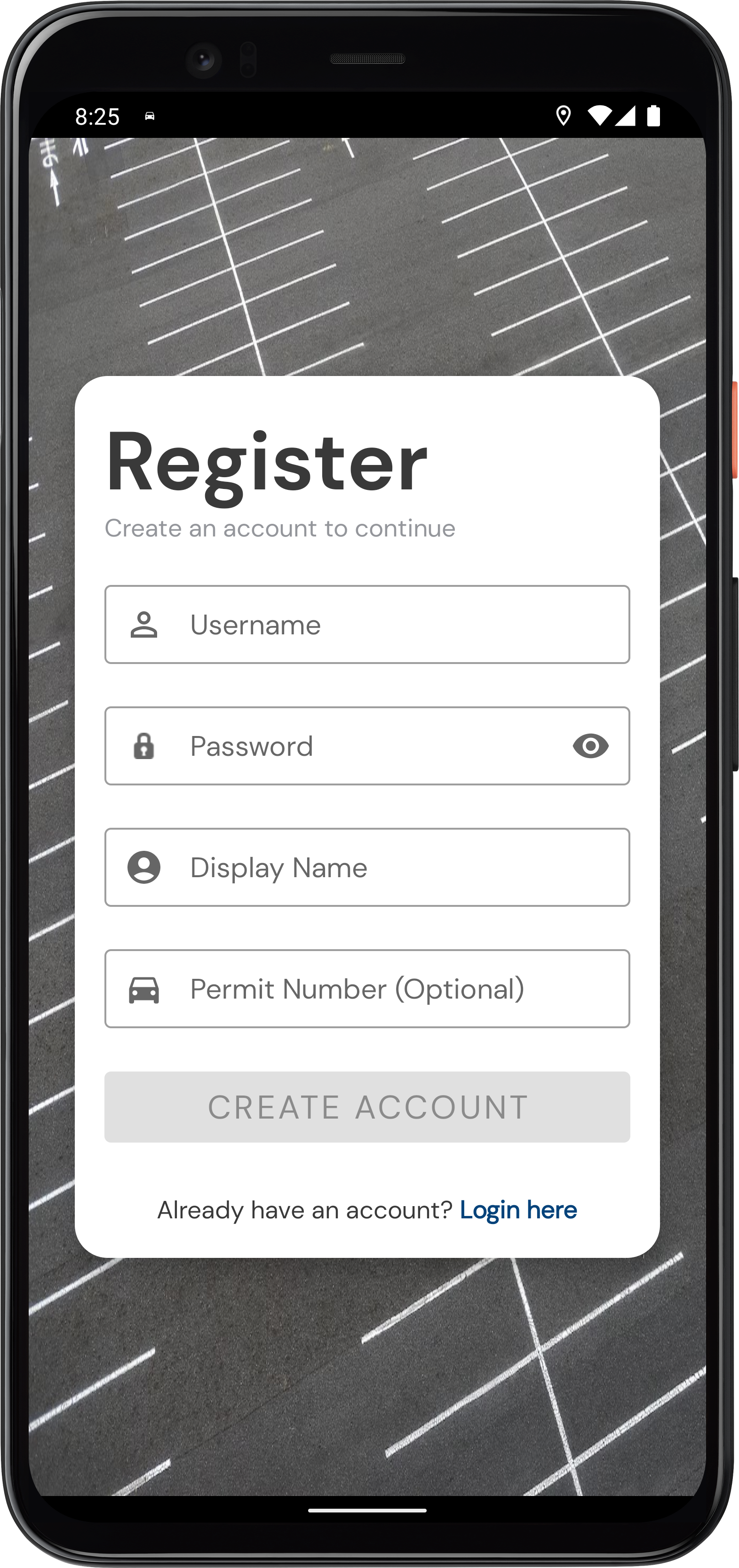
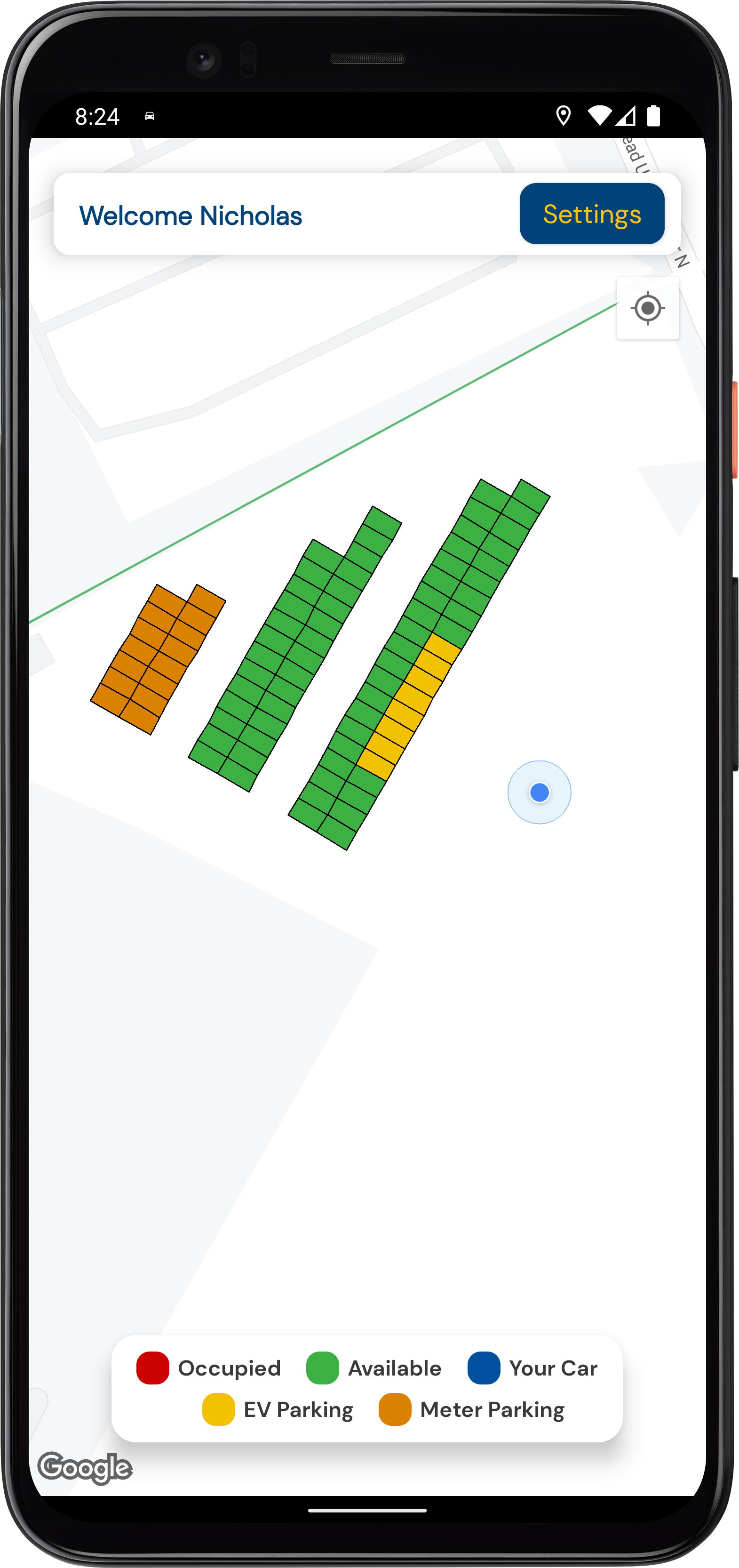
Muchos estudiantes y personal pueden dar fe del estacionamiento problemático en la Universidad de Lakehead. Para proporcionar una solución simple, rápida y efectiva a este problema, hemos creado una aplicación de software inteligente que facilita la búsqueda de un estacionamiento mucho más fácil. El software se implementa como una aplicación móvil para teléfonos inteligentes que muestra información como espacios de estacionamiento gratuitos, tiempos de ocupado y la ubicación de su automóvil estacionado. Al llegar a la universidad, puede ser difícil encontrar un lugar de estacionamiento abierto y frustrante cuando llega tarde. Esta aplicación proporcionaría una solución a este problema y proporcionaría beneficios adicionales, como ahorrar tiempo al usuario, reducir el estrés innecesario y ayudar a reducir el impacto ambiental de las emisiones de carbono producidas por los vehículos motorizados. Nuestras pruebas y capacitación iniciales de este proyecto se centrarán en el estacionamiento del campus G en la Universidad de Lakehead, pero podrían ampliarse aún más a otros campos, como estructuras de estacionamiento público y estacionamientos de centros comerciales.
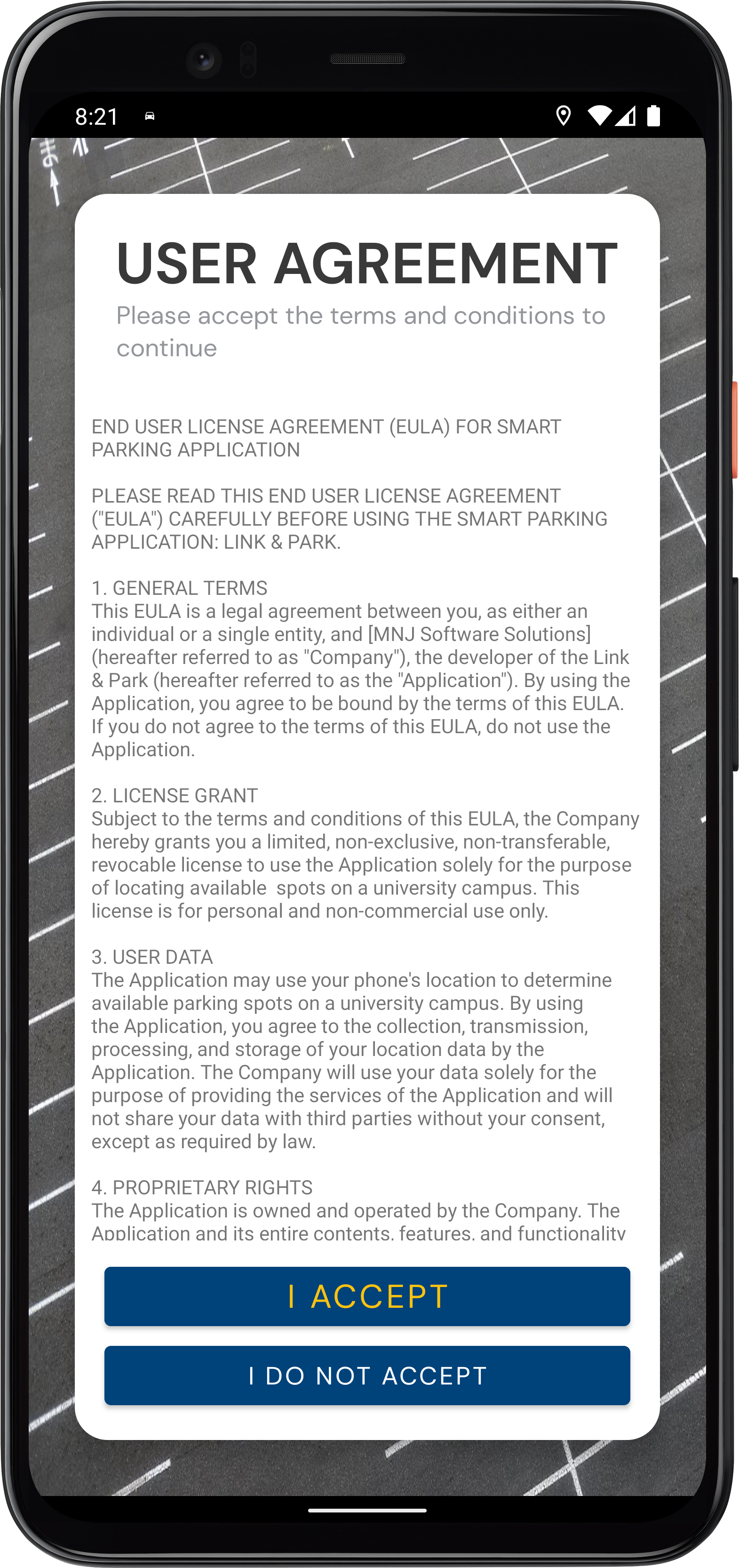
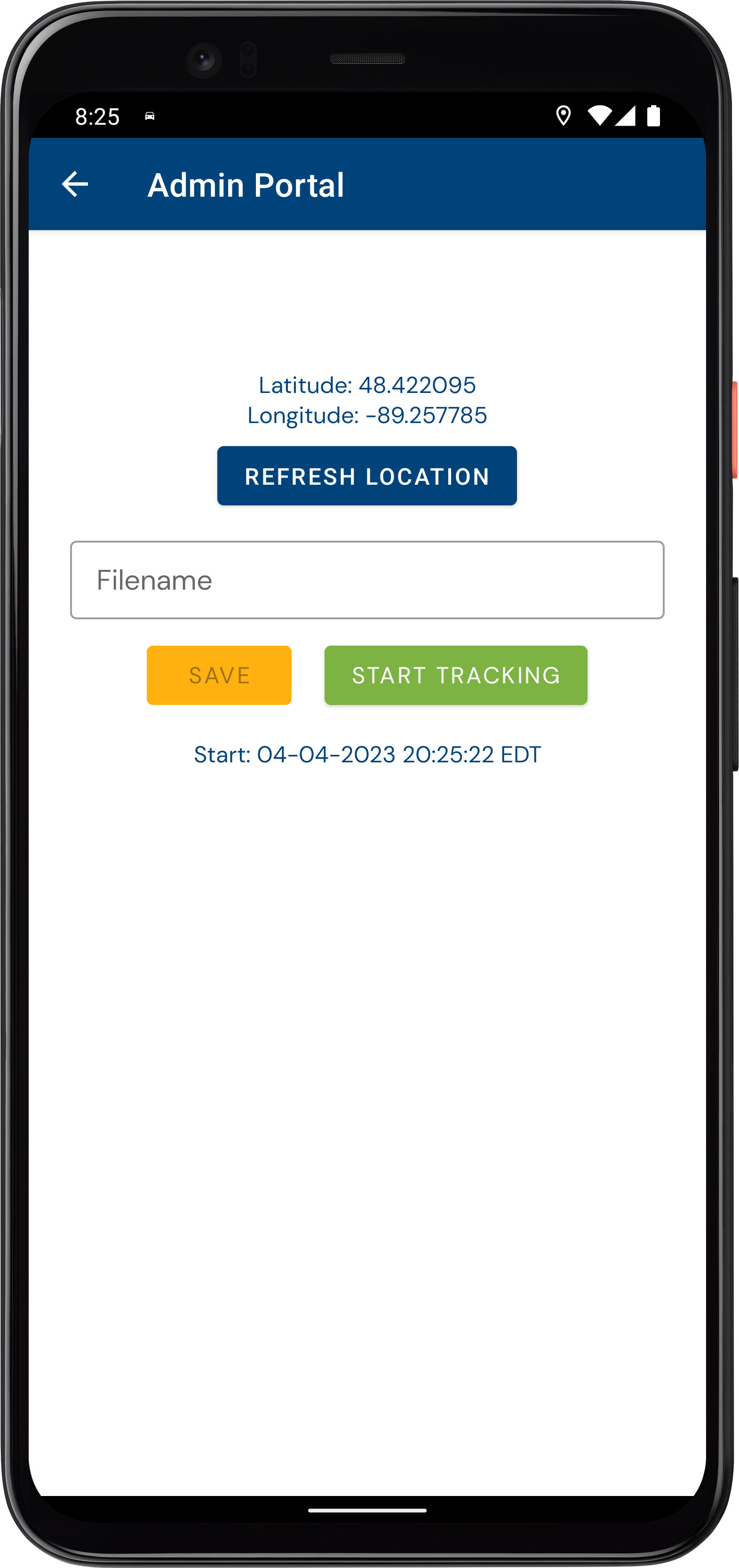
Esta aplicación será tecnológicamente bastante diferente de otras aplicaciones de estacionamiento que existen actualmente. En lugar de confiar en datos sensoriales o cámaras IP para ubicar y detectar ubicaciones de estacionamiento vacías, esta aplicación utilizará técnicas de aprendizaje automático para determinar si ha estacionado su automóvil o no y luego utiliza la ubicación del GPS y la información de red para notificar a otros usuarios que el espacio de estacionamiento ha sido lleno. Además, cuando haya dejado su lugar de estacionamiento, nuestro modelo podrá detectarlo con precisión y marcar el espacio de estacionamiento como gratuito. Deberán probarse diferentes métodos de clasificación de aprendizaje automático para garantizar que hayamos elegido el modelo más apropiado. El modelo de aprendizaje automático predecirá en función de su velocidad antes y después de una parada completa; Debería poder reconocer la diferencia entre caminar y conducir, lo que le permite determinar la ubicación de detención.
Los documentos relacionados con el desarrollo de este proyecto se enumeran a continuación:


