YOLaT VectorGraphicsRecognition
1.0.0
هذا المستودع هو تنفيذ Pytorch الرسمي لنماذج التعرف على رسومات المتجهين القوية.
ورقة Neups-2021: التعرف على رسومات المتجهات بدون نقطية.
ورقة TPAMI-2024: رسومات المتجهات التعرف على التسلسل الهرمي ومجموعة بيانات رسومات ناقلات جديدة قائمة على المخطط
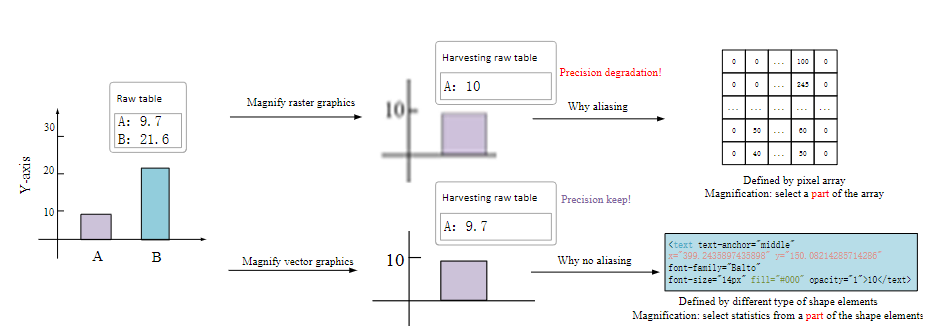
يمكن أن يؤدي تقديم رسومات المتجهات إلى صفائف البكسل إلى تكاليف ذاكرة كبيرة أو فقدان المعلومات ، كما هو موضح في الشكل 1. بالإضافة إلى ذلك ، فإن هذه العملية تتجاهل المعلومات الهيكلية رفيعة المستوى داخل البدائية ، وهو أمر بالغ الأهمية لمهام الاعتراف مثل تحديد الزوايا والخطايا. لتلخيص ، نقترح عليك فقط إلقاء نظرة على المسلسلات النصية (Yolat & Yolat ++) التي تتناول المشكلات مع الرسومات النقطية عن طريق أخذ المستندات النصية لرسومات المتجهات كمدخلات.
conda create -n your_env_name python=3.8
conda activate your_env_name
sh deepgcn_env_install.sh أ) قم بتنزيل وفك مجموعة بيانات Proferplans إلى مجلد DataSet: data/FloorPlansGraph5_iter
ب) قم بتشغيل البرامج النصية التالية لإعداد مجموعة البيانات للتدريب/الاستدلال.
cd utils
python svg_utils/build_graph_bbox.py أ) قم بتنزيل مجموعة بيانات المخططات وفك ضغطها إلى مجلد مجموعة البيانات: data/diagrams
ب) قم بتشغيل البرامج النصية التالية لإعداد مجموعة البيانات للتدريب/الاستدلال.
cd utils
python svg_utils/build_graph_bbox_diagram.py cd cad_recognition
CUDA_VISIBLE_DEVICES=0 python -u train.py --batch_size 4 --data_dir data/FloorPlansGraph5_iter --phase train --lr 2.5e-4 --lr_adjust_freq 9999999999999999999999999999999999999 --in_channels 5 --n_blocks 2 --n_blocks_out 2 --arch centernet3cc_rpn_gp_iter2 --graph bezier_cc_bb_iter --data_aug true --weight_decay 1e-5 --postname run182_2 --dropout 0.0 --do_mixup 0 --bbox_sampling_step 10 cd cad_recognition
CUDA_VISIBLE_DEVICES=0 python -u train.py --batch_size 4 --data_dir data/diagrams --phase train --lr 2.5e-4 --lr_adjust_freq 9999999999999999999999999999999999999 --in_channels 5 --n_blocks 2 --n_blocks_out 2 --arch centernet3cc_rpn_gp_iter2 --graph bezier_cc_bb_iter --data_aug true --weight_decay 1e-5 --postname run182_2 --dropout 0.0 --do_mixup 0 --bbox_sampling_step 5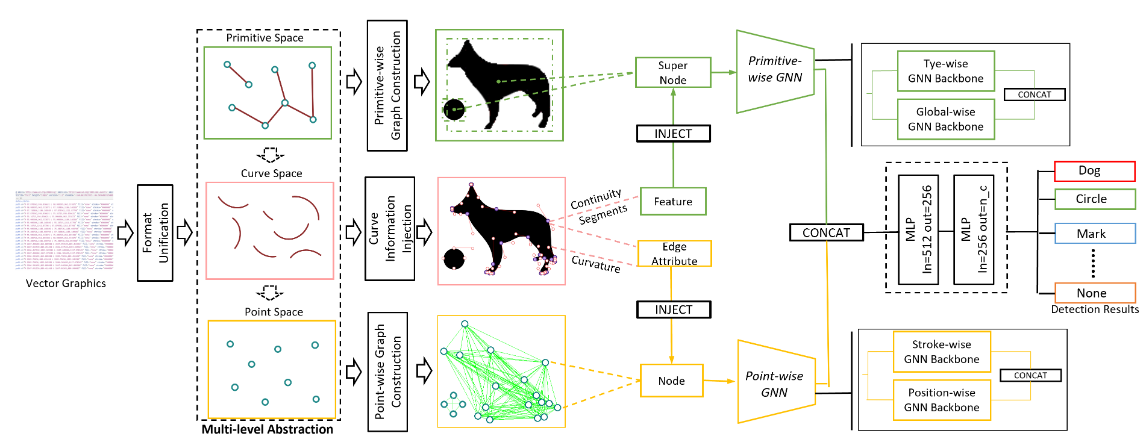
يتم تقديم Yolat ++ ، يتميز ببنية هرمية مصممة ل VGS ، وتمتد على ثلاثة مستويات: بدائية ، منحنى ، ونقطة . بالإضافة إلى ذلك ، توظف Yolat ++ استراتيجية تعزيز مدركة للموضع للتمييز الفعال بشكل فعال.
bibtex:
@inproceedings{jiang2021recognizing,
title={{Recognizing Vector Graphics without Rasterization}},
author={Jiang, Xinyang and Liu, Lu and Shan, Caihua and Shen, Yifei and Dong, Xuanyi and Li, Dongsheng},
booktitle={Proceedings of Advances in Neural Information Processing Systems (NIPS)},
volume={34},
number={},
pages={},
year={2021}}
@inproceedings{yolat24,
title={{Hierarchical Recognizing Vector Graphics and A New Chart-based Vector Graphics Dataset}},
author={Shuguang Dou, Xinyang Jiang, Lu Liu, Lu Ying, Caihua Shan, Yifei Shen, Xuanyi Dong, Yun Wang, Dongsheng Li, Cairong Zhao},
booktitle={IEEE Transactions on Pattern Analysis and Machine Intelligence},
volume={},
number={},
pages={},
year={2024}}
من فضلك هل تنظر؟ قم بلف مشروعنا لمشاركته مع مجتمعك إذا وجدت هذا المستودع مفيدًا!
معيار للكشف المستند إلى VG وفهم المخطط


