LoRaEdge_BasicTracking
v1.5.4
警告:連接太陽能電池板或電池時,引腳的極性應如下:
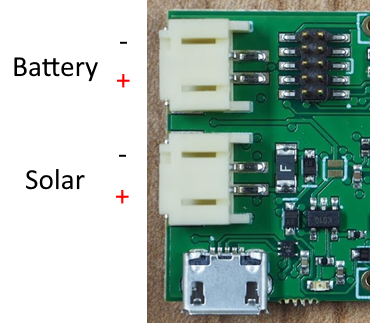
警告:如果需要用於鋰離子電池的充電控制器,則必須連接電池跳線:
Arduino IDE可用於通過Micro USB端口上傳軟件。在使用之前,必須配置IDE。第一件事是通過董事會經理安裝董事會。
轉到文件 - >首選項。將以下鏈接添加到其他董事會經理網址:https://github.com/skylabiot/loraedge_basictracking/raw/master/package_skylab_index.json。
可以通過搜索Skylab來通過工具 - > Board->董事會管理器下載板軟件包。
通過工具 - >板 - > Skylab板 - > Skylab Lora邊緣選擇板。
示例草圖可以通過文件 - >示例 - > Skylab lora邊緣 - > BasicLoraa加載。
BasicLoraa草圖依賴項是:
Arduino SAMD21低功率庫:https://www.arduino.cc/en/reference/arduinolowpower
Arduino RTC庫:https://www.arduino.cc/en/reference/rtc
Adafruit BME280庫:https://github.com/adafruit/adafruit_bme280_library
Adafruit LMS303加速度計庫:https://github.com/adafruit/adafruit_lsm303_accel
FlashStorage Library by cmaglie:https://github.com/cmaglie/flashstorage
上傳模式後,示例示例串行監視器可以以9600的波特率打開。系統首先顯示配置的dev_eui,join_eui和app_key(MSB首先)。從LR1110芯片請求Dev_EUI,並且該特定芯片是獨特的。該鍵應在使用網絡的控制台中使用。 JOIN_EUI和APP_KEY在代碼中配置,應更改為正確的鍵,由使用的網絡控制台給出。如果正確配置,設備會自動加入。
發送0x01請求Wi-Fi和GNSS掃描有效載荷(答案在端口2和3上)。
發送0x02以請求當前配置(答案在端口44上)。
發送一個0x03以請求當前電池電壓(答案在端口10上)。
配置下行鏈路格式應如下:
| 0 | 1-2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|
| 引領 | 間隔 | 信標 | 無線上網 | GNSS | 運動激活 /時間 | 運動間隔持續時間 | 運動傳感器閾值寄存器 | 運動傳感器持續時間寄存器 |
字節0:LED此字節配置狀態LED。
字節1和2:間隔這2個字節配置消息時間之間的標準間隔時間為幾分鐘。間隔設置為0將保持當前設置,並且不會設置新的間隔時間。最大時間為65535分鐘。
字節3:信標這個字節配置了de信標的打開時間。時間是在幾分鐘之內。最大時間為255分鐘。設置為0時,信標將不會打開。
字節4:Wi-Fi此字節打開或關閉Wi-Fi有效載荷。
字節5:GNSS此字節打開或關閉GNSS有效載荷。
字節6:運動激活 /時間,該字節在檢測到運動時設置發送間隔。時間為幾分鐘,最多為255。設置為0運動檢測中斷時。
字節7:運動間隔持續時間此字節設置了最後一次運動後系統使用運動間隔的持續時間。時間為幾分鐘,最多為255。設置為0時,此字節將被忽略(使用當前設置)。
字節8:運動傳感器閾值寄存器此字節設置運動傳感器閾值寄存器。如果將字節7設置為0,則將忽略此字節(使用當前設置)。
字節9:運動傳感器持續時間寄存器此字節設置運動傳感器持續時間寄存器。如果將字節7設置為0,則將忽略此字節(使用當前設置)
系統通過與端口44上的上行鏈路以與下行鏈路相同的格式發送集合配置來確認下行鏈路。
領導,間隔5分鐘,沒有信標,Wi-Fi和GNSS有效載荷,運動檢測:
01 00 05 00 01 01 01 00 00 00 00 00
引導,間隔600分鐘,沒有信標,Wi-Fi有效載荷,GNSS有效載荷關閉,運動檢測:
00 15 36 00 01 00 00 00 00 00 00
保持當前的LED和間隔設置,沒有信標,Wi-Fi有效載荷關閉,GNSS有效載荷,運動檢測:
02 00 00 00 00 01 00 00 00 00 00
打開信標5分鐘,關閉運動檢測,保留所有其他當前設置:
02 00 00 05 02 02 02 00 00 00 00 00
保持當前的LED和間隔設置,沒有信標,Wi-Fi有效載荷,GNSS有效載荷關閉,運動間隔1分鐘,運動間隔,上次運動後4分鐘,運動閾值寄存器設置為7,運動持續時間寄存器設置為3:
02 00 00 00 01 00 01 04 07 03
該模式示例草圖可以發送4種有效載荷。這些有效載荷類型可通過所使用的端口號識別。可以在此github頁面(exippledecoderttn.js)上找到一個示例TTN解碼器腳本。
這是Wi-Fi和傳感器有效載荷。該有效載荷具有3個Wi-Fi點和傳感器數據的信息。格式如下:
| 0 | 1-6 | 7 | 8-13 | 14 | 15-20 | 21 | 22-23 | 24-25 | 26 | 27 |
|---|---|---|---|---|---|---|---|---|---|---|
| RSSI 1 | Mac 1 | RSSI 2 | Mac 2 | RSSI 3 | Mac 3 | 電池電壓 | 溫度 | 壓力 | 濕度 | 運動激活 |
字節0、7和14:Wi-Fi RSSI
這些字節具有掃描的Wi-Fi點的RSSI /信號強度。這些值必須解釋為簽名的整數。
字節1至6、8至13和15至20:Wi-Fi Mac
這些字節具有掃描的Wi-Fi點的MAC地址。
字節21:電池電壓
該字節具有原電池電壓值。確切的電壓可以用:電壓=(float)((3.3 / 255) *((4.7 + 10) / 10) *(電池電壓));
字節22至23:溫度
這些字節具有溫度值。可以通過:溫度=(float)(溫度 / 100)來計算攝氏度(◦C)的精確溫度;
字節24至25:壓力
這些字節具有氣壓值。可以通過:氣壓=(float)(壓力 / 10)計算hector Pascal(HPA)的確切壓力;
字節26:濕度
該字節的濕度值為%。
字節27:運動激活
該字節在正常間隔中顯示為0。當運動間隔時,該字節在運動間隔中給出了剩餘的分鐘數。
這是GNSS有效載荷。此有效載荷僅具有RAW GNSS數據,並且大小可變。
此有效載荷用作“我醒著”的消息。默認情況下,它設置為每24小時。可以通過更改“控制時間”的值來更改。格式如下:
字節0:電池電壓
該字節具有原電池電壓值。確切的電壓可以用:電壓=(float)((3.3 / 255) *((4.7 + 10) / 10) *(電池電壓));
LR1110在加入時和此後的24小時時會發送自動消息。可以忽略此消息。
當信標設置設置為1時,信標將被激活。該設備將離開網絡,並在869800000 Hz頻率(官方LORA頻率之外)上每秒發送隨機的Lora有效載荷。如果將LED激活設置為1,則綠色LED將打開。在到達設定的時間時,信標將停止。系統將重新加入網絡並像以前一樣運行。
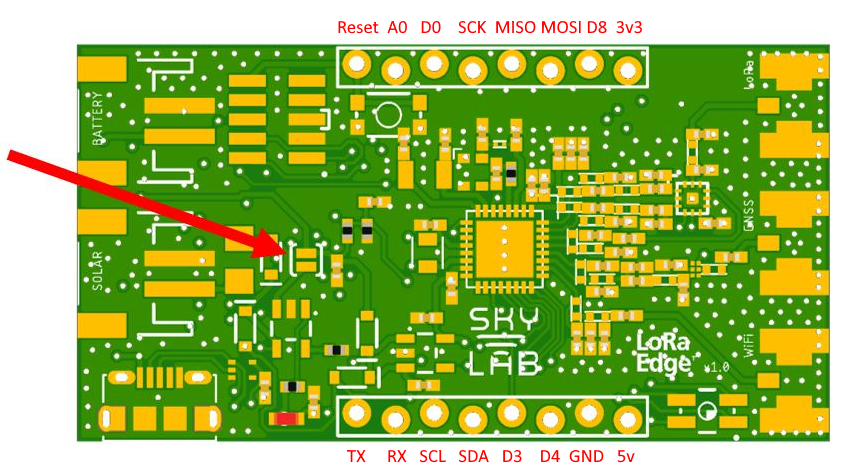
| UC PIN | 板別針 | Arduino IDE的名稱 |
|---|---|---|
| PA02 | A0 | A0,DAC0 |
| PA05 | AIN5(電池) | ain5 |
| PA06 | D0 | D0 |
| PA07 | D8 | D8 |
| PA08 | D3 | D3 |
| PA09 | D4 | D4 |
| PA10 | 忙(LR1110) | 忙碌的 |
| PA11 | 事件(LR1110) | 事件 |
| PA14 | NReset(LR1110) | nReset |
| PA15 | LED紅色 | LEDR |
| PA16 | 莫西 | 莫西 |
| PA17 | SCK | SCK |
| PA18 | NSS(LR1110) | NSS |
| PA19 | 味o | 味o |
| PA20 | INT2(LSM303AGR) | int2 |
| PA21 | INT1(LSM303AGR) | int1 |
| PA22 | SDA | SDA |
| PA23 | SCL | SCL |
| PA24 | D-(USB) | pin_usb_dm |
| PA25 | D+(USB) | pin_usb_dp |
| PA27 | PA27(PAD) | PA27 |
| PA28 | PA28(PAD) | PA28 |
| PA30 | SWDCLK/TCK(調試引腳) | - |
| PA31 | SWDIO/TMS(調試引腳) | - |
| PB02 | PB02(PAD) | PB02 |
| PB03 | PB03(PAD) | PB03 |
| PB08 | LNA(GNSS) | LNA |
| PB09 | INT3(LSM303AGR) | INT3 |
| PB10 | led綠色 | LEDG |
| PB11 | LED藍色 | LEDB |
| PB22 | TX | pin_serial_tx |
| PB23 | Rx | pin_serial_rx |
| 版本 | 更改 |
|---|---|
| 1.0 | 第一版。 |
| 1.2 | 通過下行鏈路,Wi-Fi有效載荷和無線電信標中的傳感器集成來支持更多配置。 |
| 1.3 | BasicLoraa草圖的更改:更改下行鏈路以減少字節。在沒有LORA覆蓋範圍的情況下,請修復電池排水的連接問題。增加了對運動檢測的支持,可以通過將運動激活設置為1來啟用。 |
| 1.3.1 | 修復了在BasicLoraa草圖中失敗的加入後,已修復了加入問題。 |
| 1.4 | 更新端口2上行鏈路(字節27)。更新下行鏈路格式,包括示例。添加了下行鏈路確認上行鏈路。能夠將設置保存到EEPROM,以免重新啟動時重置。 |
| 1.4.1 | 文件清理。 |
| 1.5 | 嘗試加入時紫色的LED打開。修復缺少Wi-Fi有效載荷錯誤。支持ALC同步以備將來使用。通過添加評論使代碼更可讀。 |
| 1.5.1 | 串行顯示器上帶有零的ZEROS填充EUI /鍵,以便於復制。 Lorawan,固件和引導加載程序版本現在在串行顯示器上的十六進制中打印。 |
| 1.5.2 | 修復了啟動後和第一次運動後未發送第一次有效載荷。 |
| 1.5.3 | 為請求設置添加了下行鏈路函數。修復了運動間隔計時器中的錯誤。 |
| 1.5.4 | 重新啟動後,固定間隔值並非總是正確加載。 |


