niryo_project
1.0.0
该项目的结构如下图:
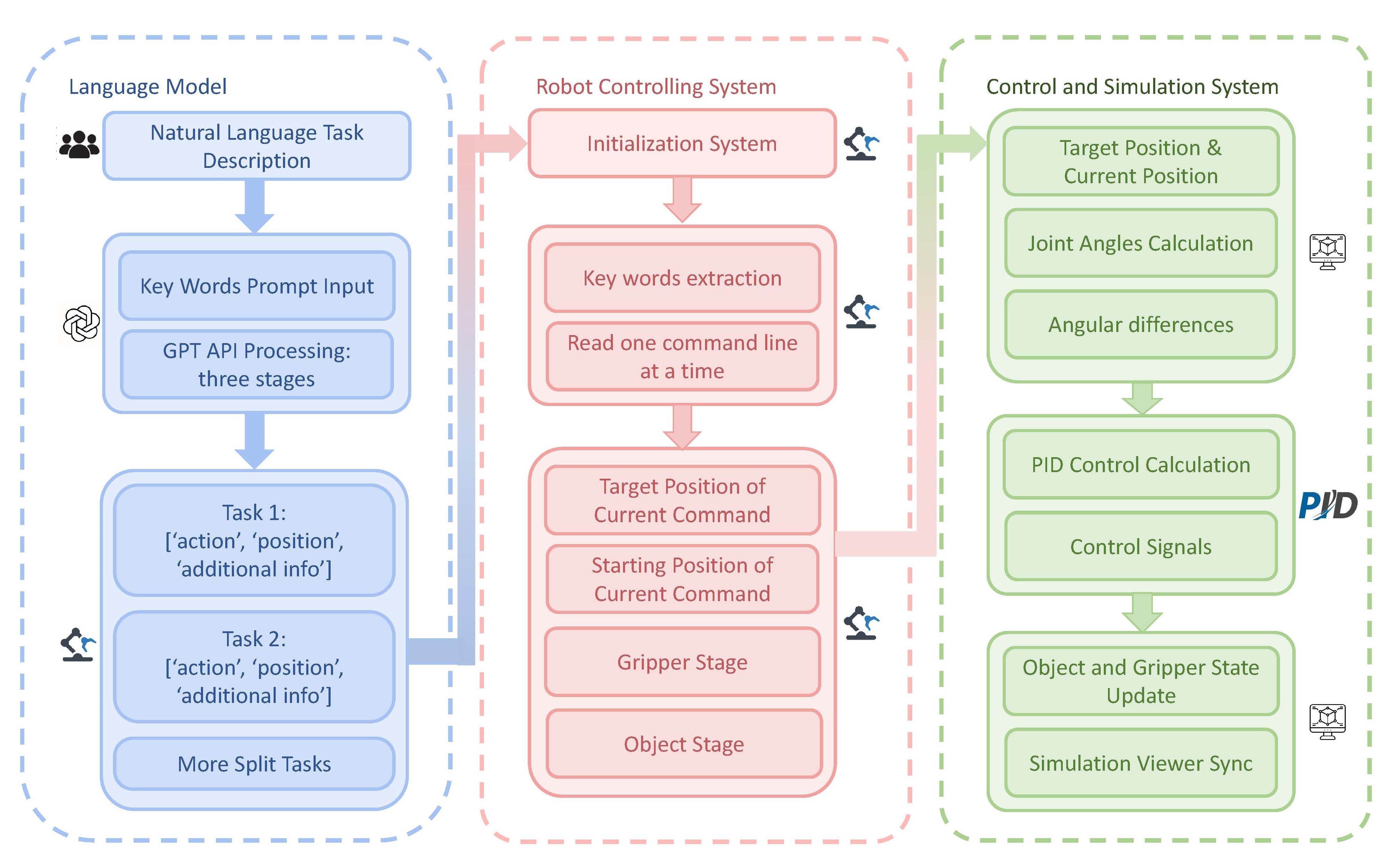
该项目分为两个部分:硬部分和软件。困难的部分是机器人臂控制部件,该部分负责机器人臂的控制。软件是语言模型部分,它负责产生指令。
对于语言模型部分,我们使用OpenAI的GPT-4模型。该模型用于生成机器人臂的指令。然后将指令发送到机器人臂控制部件,然后将其用于控制机器人臂的控制。
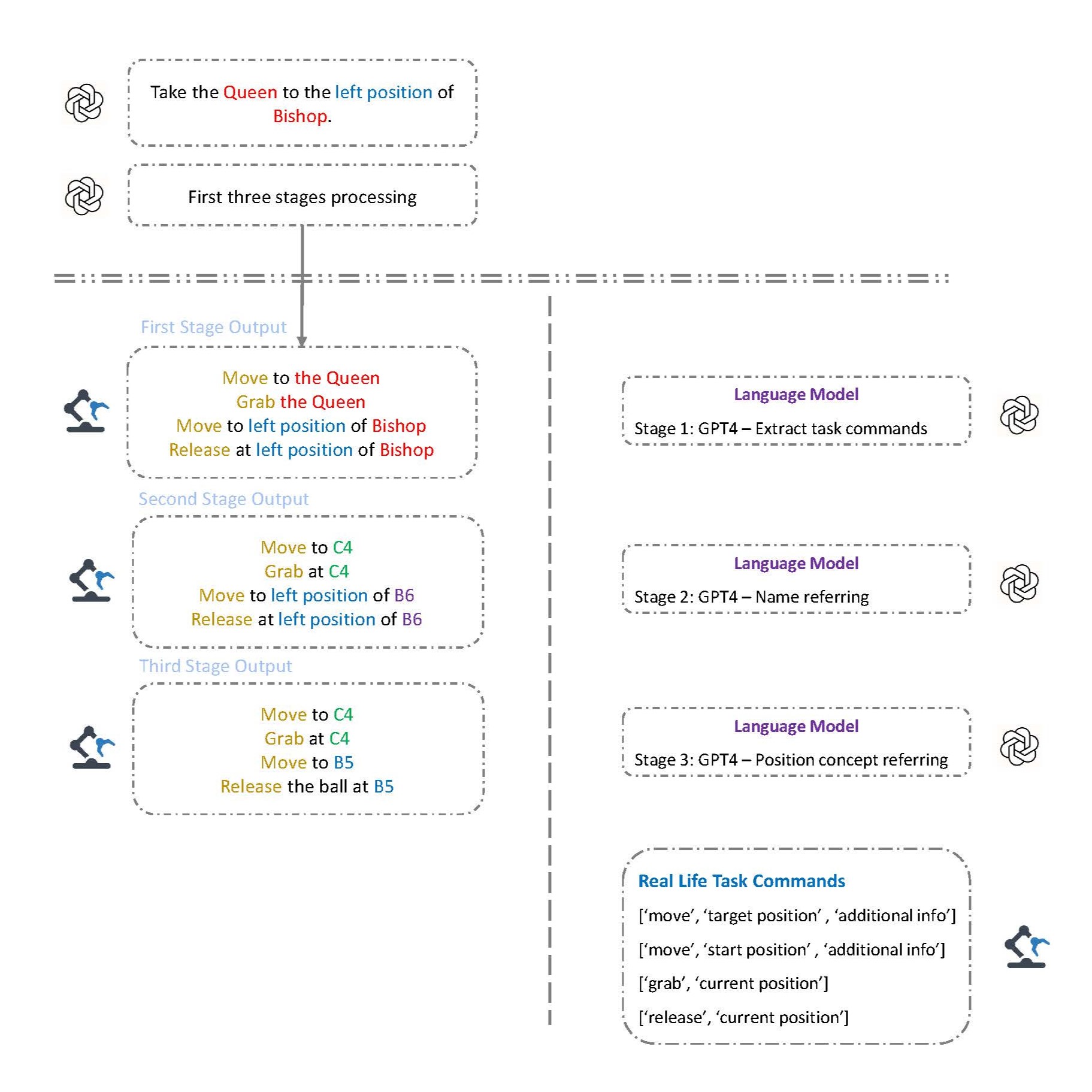
语言模型的四个阶段如下:
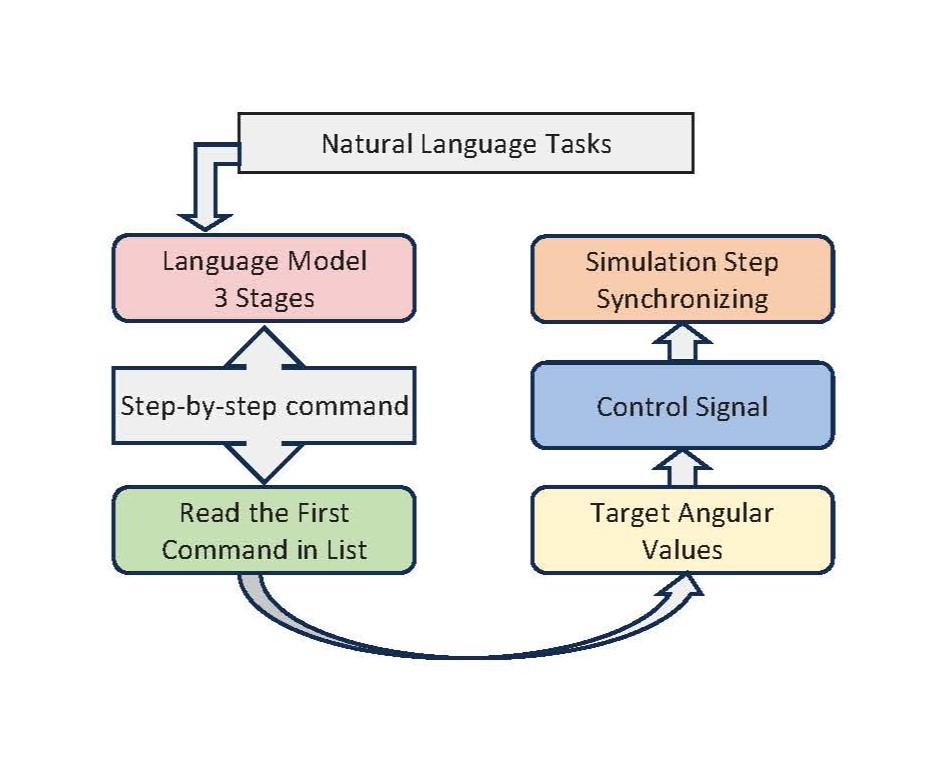
第一阶段用于将指令分为多个较小的部分。
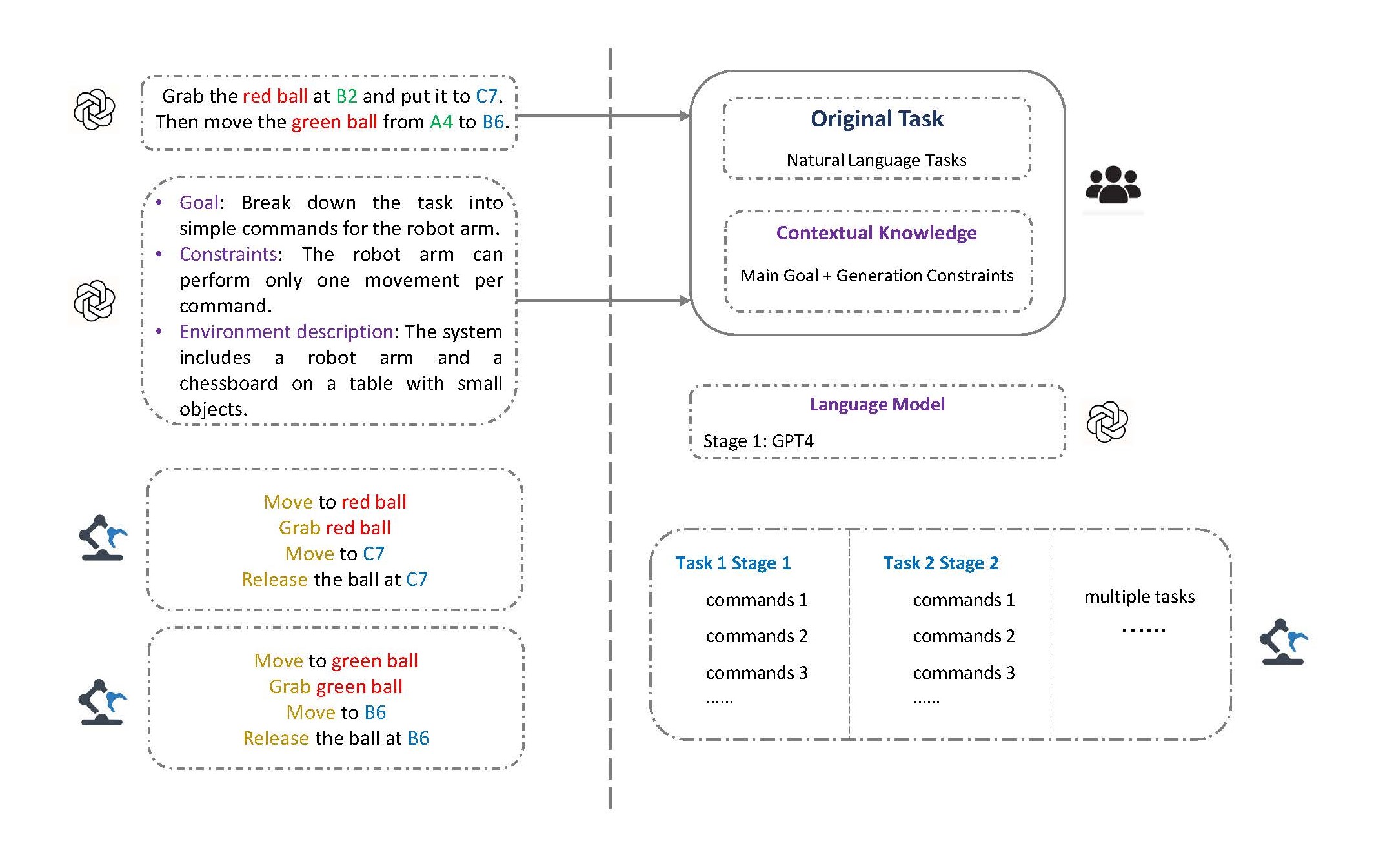
第二阶段用于清除自然语言指令中引用的名称。如下示例,指令“ Queen”也指B6的作品。
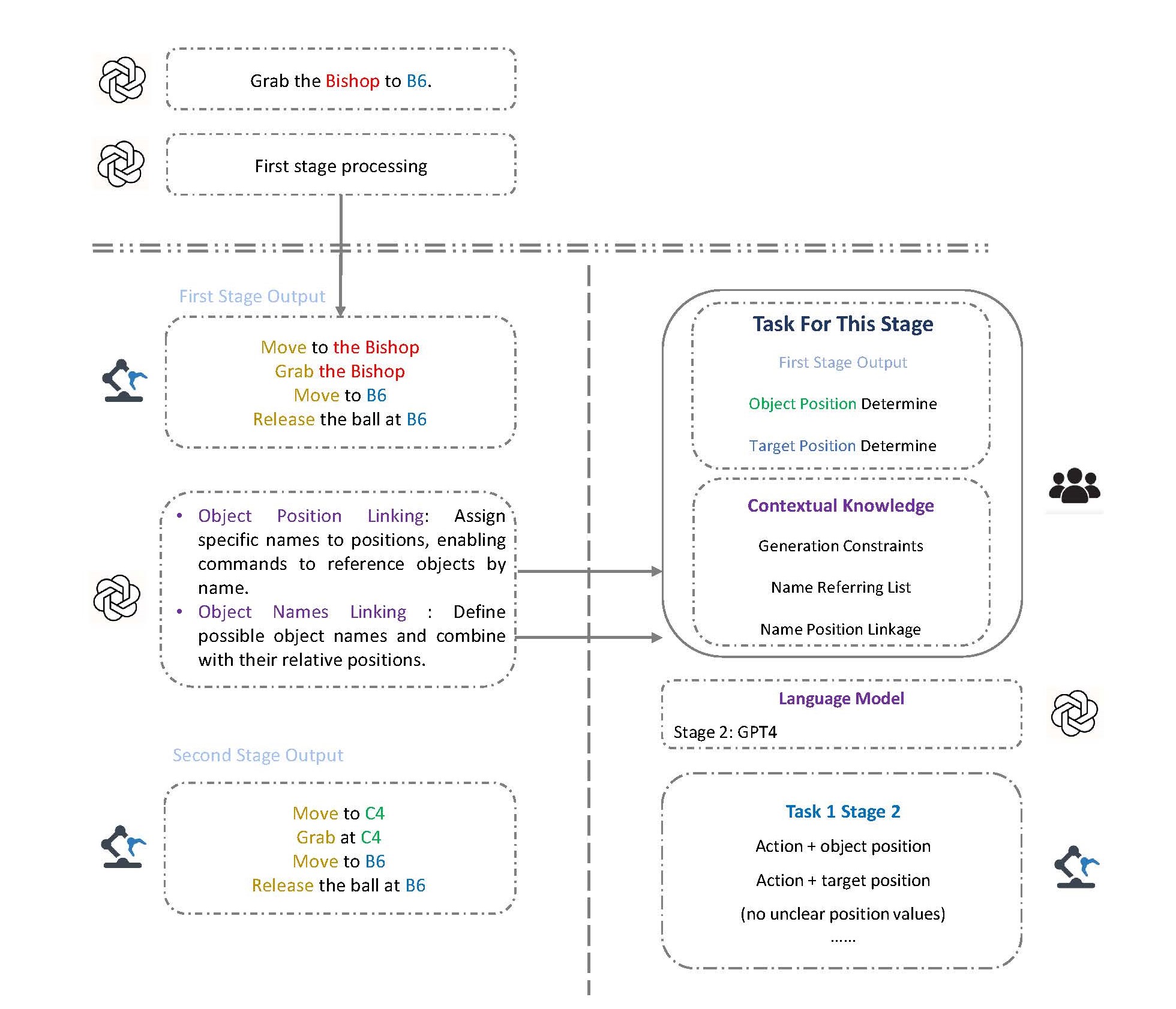
第三阶段用于清除自然语言指令中引用的位置。如下示例中,指令“ B6的右方平方”也指B5位置。
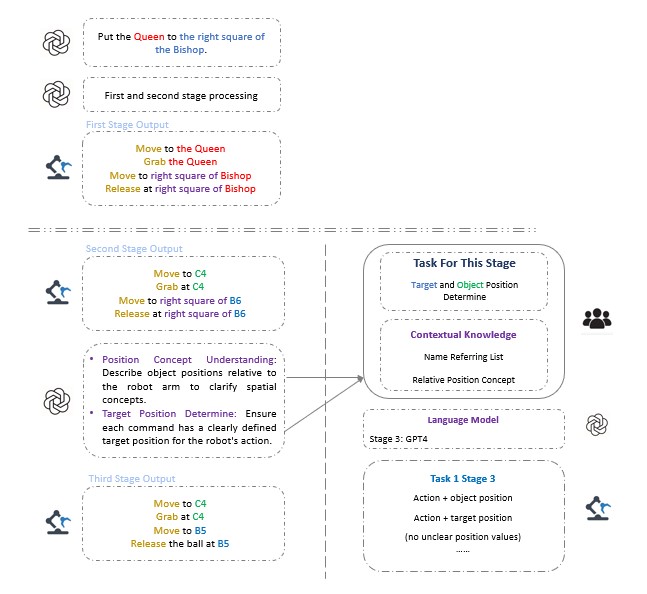
这里的最后阶段是对整体逻辑的最终检查和指令的一致性。
本文档提供了设置项目环境的说明。
克隆存储库:
git clone https://github.com/zniihgnexy/niryo_project.git
cd niryo_project创建虚拟环境:
mamba env create -f mamba_mujoco_base.yml激活虚拟环境:
conda activate mujoco安装所需的软件包:
pip install -r requirements.txt运行仿真脚本以进行单个说明和多个指令:
python main_simulation.py
python main_simulation_multi.py这两个是模拟的示例视频。第一个是移动任务机器人仿真的单个指令类型,第二个是多实施模拟的复杂逻辑。
请参阅下面的视频:
单一指导:在此视频中,输入命令是“将女王移至C2”。机器人将将小绿球(B6女王)移至正方形C2。
多指导:在此视频中,输入命令是“将teh Queen移至其更远的正方形并将典当移至对角线广场”。机器人将将女王(B6的球)移至正方形C6,将典当(B3的球)移至正方形C2。
该实验基于GPT-4语言模型,因此需要API键。请在llmapi/api.py文件中设置自己的密钥。 (您可以从https://beta.openai.com/account/api-keys获取钥匙)
目前,API文件尚未上传。
项目结构如下:


