TBTRACKER-RX
基于ESP32和SX1278的Arduino的便宜的,移动的Lora高海拔气球接收器,支持GPS,Web界面和OLED显示屏。从v0.0.9开始,它支持SSDV。
TBTRACKER-RX是用于从高海拔气球接收Lora传播的草图。它将接收,解码和上传这些传输。它旨在将正确格式的遥测数据上传到https://amateur.sondehub.org
关于V0.0.12的注释(最新版本)
- 修复了导致您的位置错误上传到sondehub的错误
- 在Webinterface中添加了一个按钮,以便(重新)手动上传您的位置,以改善追逐气球。
需要硬件
该草图旨在在Arduino IDE中编译并与TTGO T-Beam板一起使用,但也将与单独的硬件模块一起使用。
您至少需要:
- 基于ESP32的董事会(建议使用T梁,但应该与大多数基于ESP32的董事会一起使用)
- LORA无线电模块(SX127X或RFM9X模块)
可选组件:
- GPS模块(Ublox,ATGM或任何兼容模块)
- SSD1306 LCD显示(或兼容)
需要图书馆
草图使用多个库。有些可能已经安装在您的Arduino IDE中,但如果没有,请按照以下说明进行操作:
- Arduinojson库(从图书馆管理器安装)
- adafruit_ssd1306库(从图书馆管理器安装)
- adafruit_gfx库(从图书馆管理器安装)
- adafruit_busio库(从图书馆管理器安装)
- Radiolib库(从图书馆管理器安装)
- tinygpsplus库((从图书馆管理器安装)
- Xpowerslib(截至版本v0.0.11。从图书馆管理器安装)
- ESPASYNCWEBSERVER库(下载:https://github.com/me-no-dev/espasyncwebserver/archive/archive/master.zip)
- ASYNCTCP库(下载:https://github.com/me-no-dev/asynctcp/archive/master.zip)
从IDE菜单中安装最后两个库:草图 - > inclage库 - > add .zip库
设置
在使用草图之前,您需要更改设置中的值。一些重要的设置:
- DevFlag:如果要测试上传到SondeHub,则将其设置为True,但不想将数据存储在SondeHub数据库中。遥测不会出现在地图上。您仍然可以检查串行监视器以检查数据的上传状态。建议进行测试。
- WiFi设置:您可以在草图中添加三个WiFi网络。该软件将自动选择最强的网络。从您的家庭网络和移动设备中的热点网络可能是好的选择。
- 呼号:更改您的呼号。它将显示在Sondehub上
- upl_lat,upl_lon,upl_alt:将其更改为当前位置。当软件无法获得有效的GPS位置时,将使用它
- upload_your_position:如果设置为true,则软件将定期上传您的位置到SondeHub,因此将在地图上显示。
- upload_payload_packet:如果设置为true,软件将将接收到的遥测上传到sondehub
- LORA设置:更改频率和LORA模式(目前仅测试模式2)
编译和运行
在按下编译按钮之前,请务必在Arduino IDE中选择ESP32板。否则,您将获得编译错误! << https://docs.espressif.com/projects/arduino-esp32/en/latest/installing.html#installing-using-using-using-usis-usis-usis-usis-usis-usis-usis-us--iender-ide <<
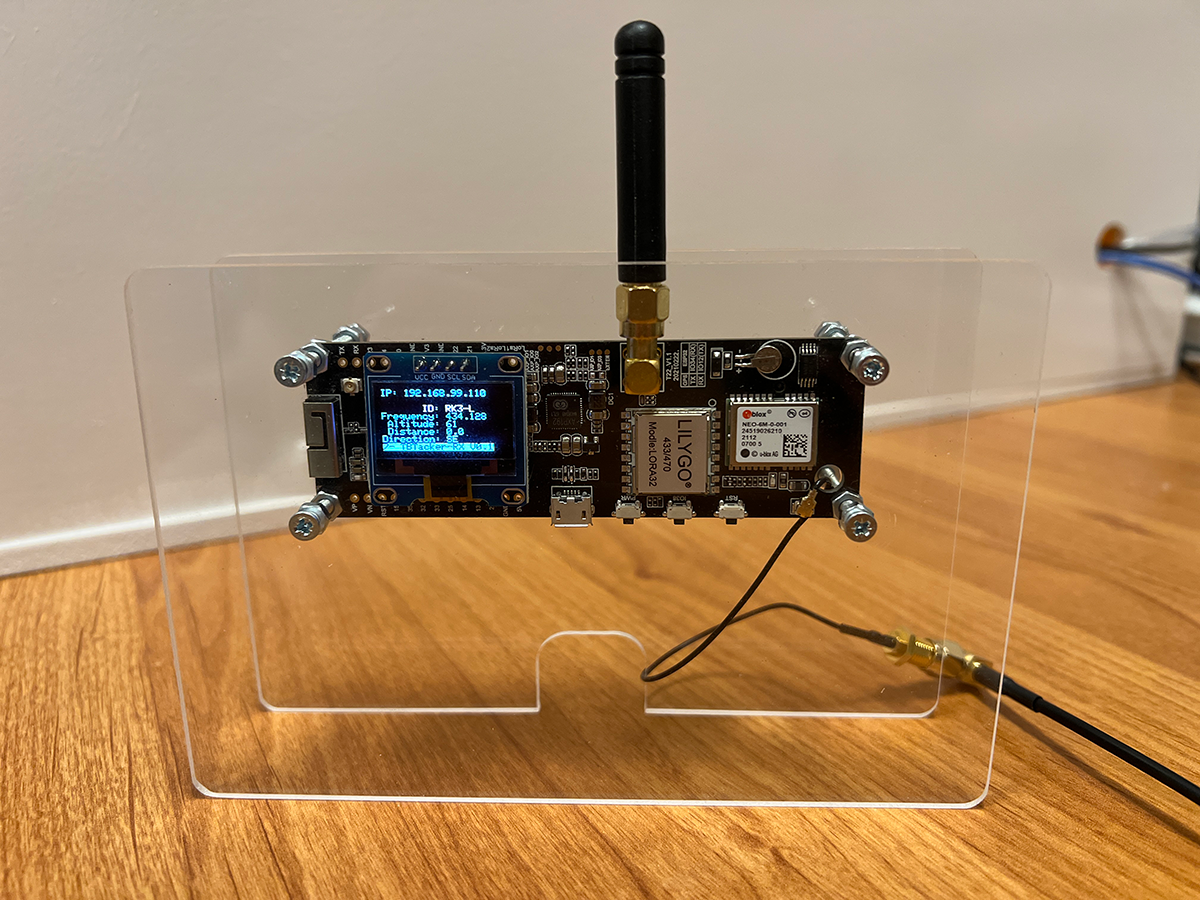
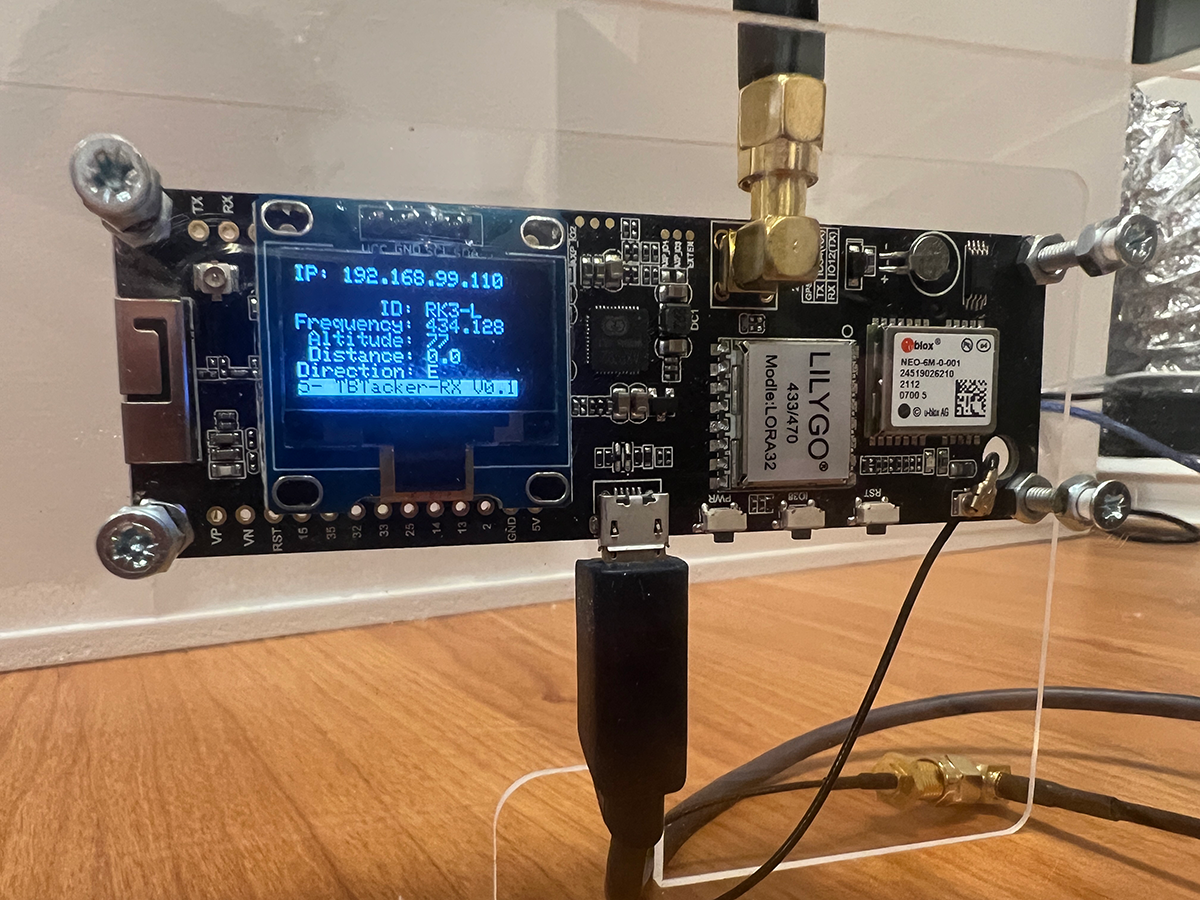
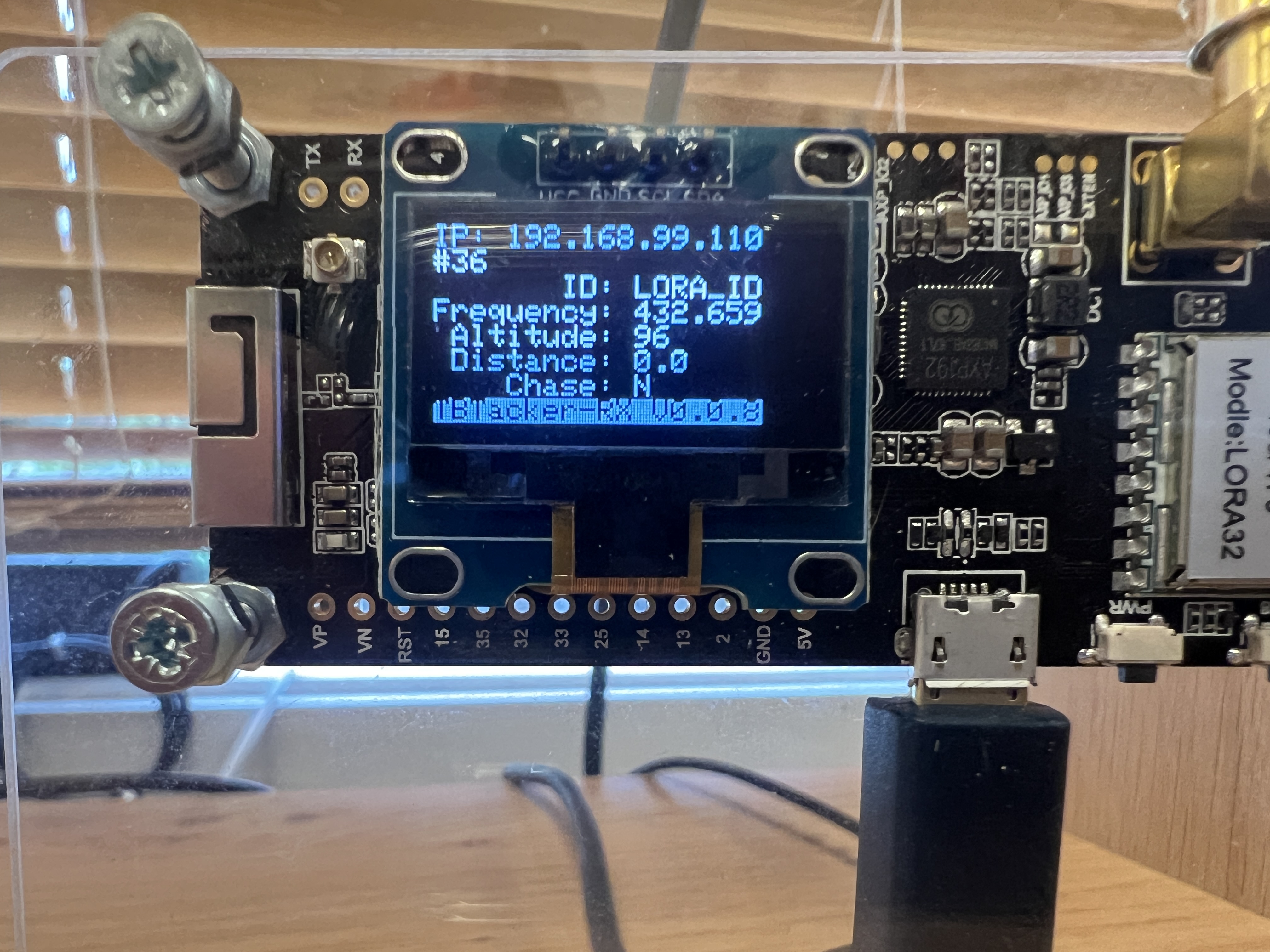
编译,上传并运行草图。使用串行显示器监视软件。它将尝试连接到您指定的WiFi网络之一,并显示从DHCP获得的IP数字。 IP-number还将在OLED显示屏上显示(如果您在板上安装了一个)。
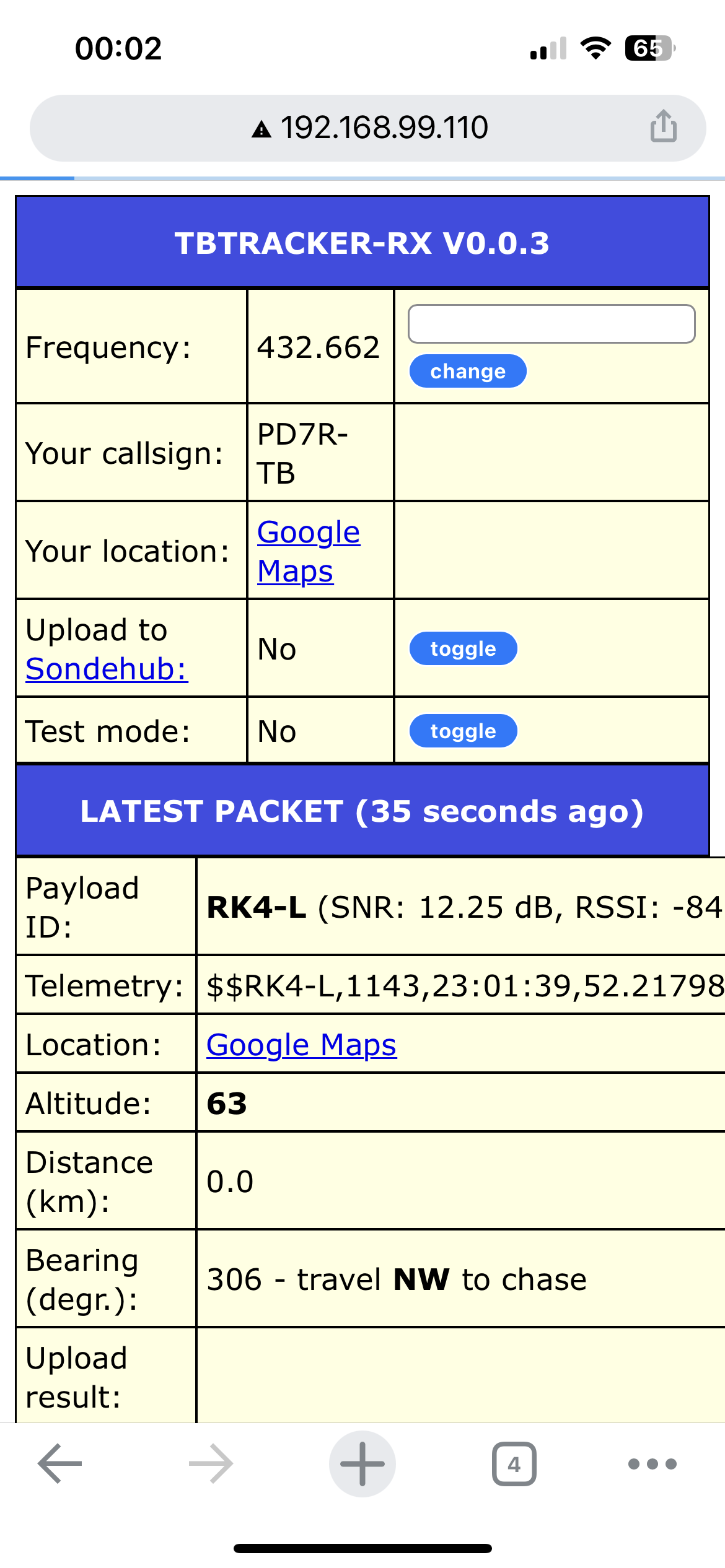
使用Web界面
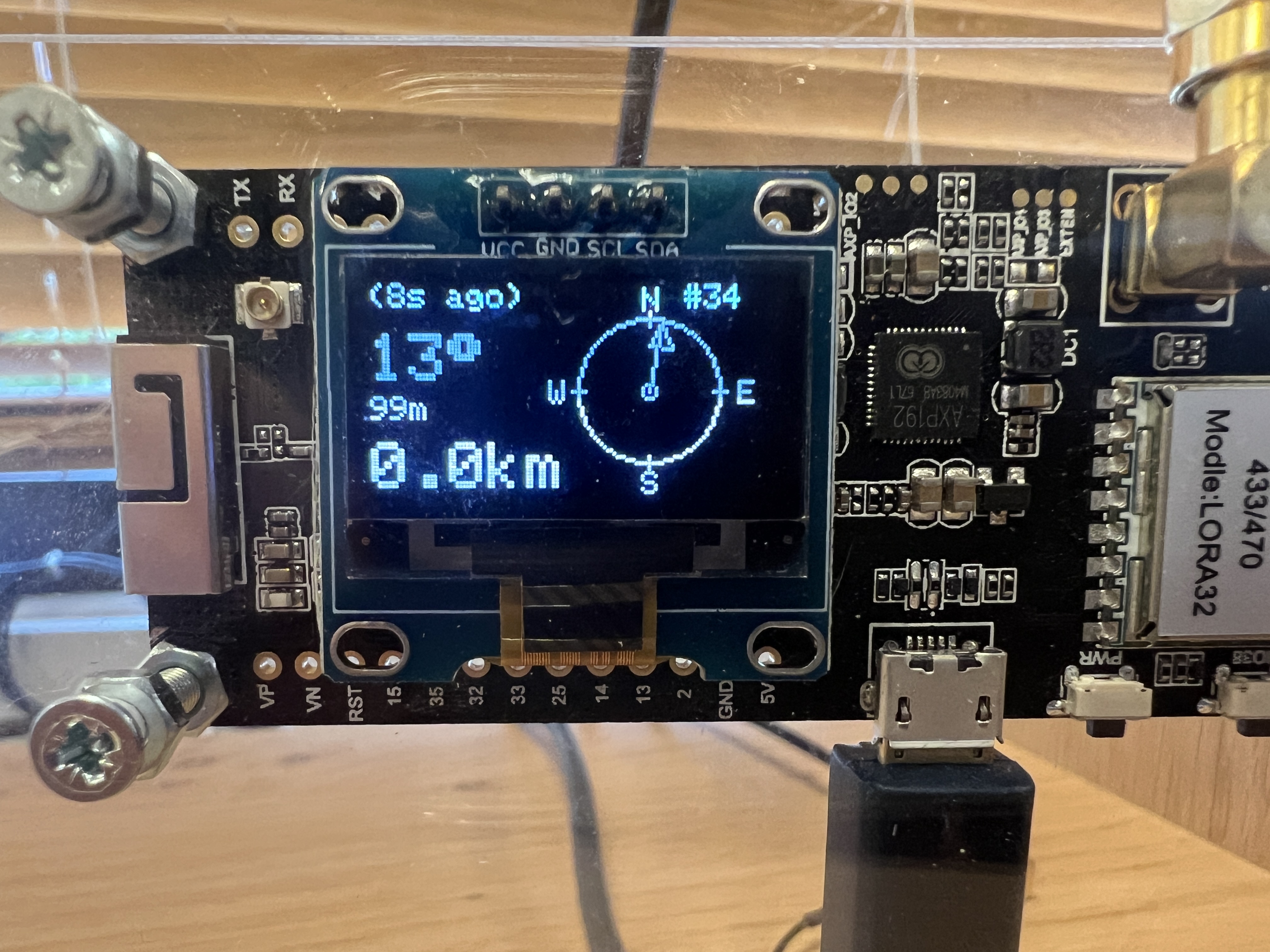
只需在浏览器中输入IP-number,并且Web界面将显示。从Web界面中,您可以更改RX频率并切换选项将遥测上载至SondeHub。主网页将每20秒自动加载一次,并向您展示如果您想追逐气球需要走的方向。
版本
V0.0.12
- 2014年5月14日:解决了每30分钟上传到SondeHub的错误
- 15-May-2024:在Webinterface中添加了一个按钮,以手动将您的位置上传到SondeHub
V0.0.11
- 2013年6月28日:在设置文件中添加了GPS调试选项
- 28-Jun-20123:已解决:数据包上传了错误的Lora模式文本。
- 29-Jun-20123:与Radiolib 6.0.1的兼容性
- 2023年7月28日:添加了对APX电源管理芯片的支持
V0.0.10:
- 2023年5月22日:架构更改以最大程度地减少收音机收听下一个数据包所花费的时间
- 2023年-22-May-2013:更新为Radiolib 6.0.0-https://github.com/jgromes/radiolib/releases/tag/6.0.0.0
- 2023年5月24日:重新启用包装包上的OLED Flash和Flash Pin接收
V0.0.9:
- 03-MAR-20123:串行港口Baudrate至115200
- 15-MAR-2023:对SSDV的添加支持
- 20-MAR-2023:更改了代码的上传部分。现在上传将从队列和单独的线程中进行
- 07-APR-20123:残疾人临时OLED闪烁,自从重新使用新数据包时,自OLED显示器上的最后一个数据包和闪烁PIN闪烁的时间
V0.0.8:
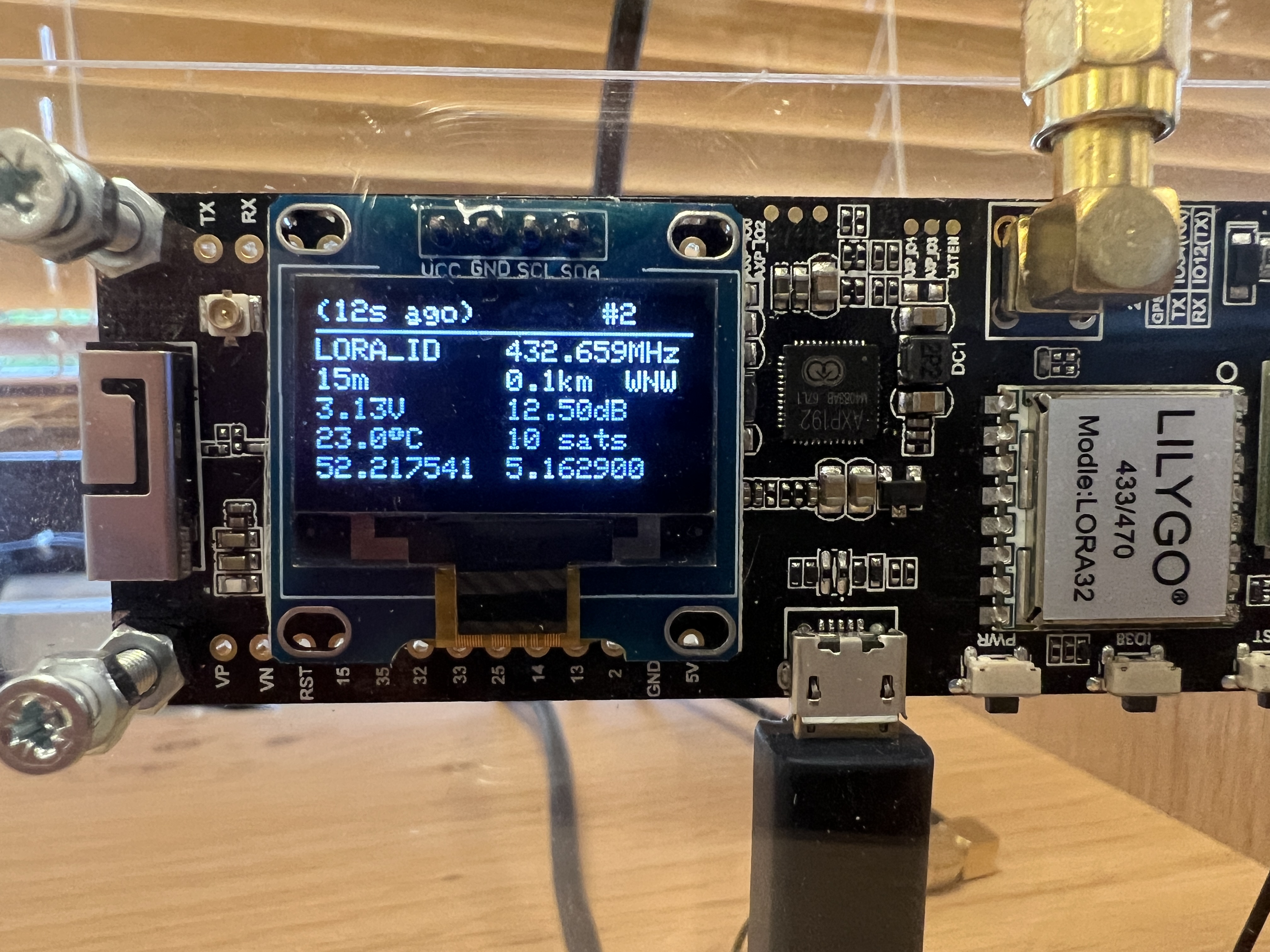
- 23-FEB-2023:对OLED的不同视觉模式的添加支持(默认,全部,追逐)
- 24-FEB-2023:对“ Flash Pin”的添加支持,该支持将在接收到数据包时将300ms设置为300ms(设置文件中的新条目!)
非常感谢Star Holden,Luc Bodson和Eelco de Graaff进行测试和建议改进
V0.0.7:
- 03-FEB-2023:Web界面中指向SondeHub的链接现在在新窗口中打开
- 03-FEB-2023:现在软件也没有wifi(串行输出或OLED显示的数据)
V0.0.6
- 29-Jan-2023:添加了一个针对APRS数据包的解析器,要在串行接口,Webinterface和SSD1306显示
V0.0.5
- 2013年1月21日:串行显示器中收到的数据包的打印长度
- 2023年1月21日:检查收到的数据包是否确实是HAB遥测包
- 21-Jan-2023:从串行监视器中删除了原始遥测字符串,以避免双重信息和不可读取的字符
- 21日至2023年1月21日:添加了对Lora-APRS数据包的支持
- 21-Jan-2023:在Web界面中添加了一个数据包日志跟踪
V0.0.4:
- 14-Jan-2023:添加了对LORA模式5的支持(明确模式,错误编码4:8,带宽41.7KHz,SF 11,低数据速率优化)
- 14-Jan-2023:添加了对LORA模式3的支持(明确模式,错误编码4:6,带宽250KHz,SF 7,低数据速率优化)
- 20-1月2023年:添加了对洛拉模式0的支持(显式模式,错误编码4:8,带宽20.8kHz,SF 11,低数据速率优化)
- 20-Jan-2023:添加了对LORA模式1的支持(隐式模式,错误编码4:5,带宽20.8kHz,SF 6,低数据速率优化)
- 20-Jan-2023:添加了支持在Webinterface中显示和更改LORA模式的支持
- 20日1月20日:解决了几个错误
- 20日1月20日:添加了无线电的自动调谐(基于无线电计算的频率错误)
V0.0.3:
- 06-Jan-2023:添加SNR,RSSI到Web界面
- 06-JAN-20123:自Web界面最新数据包以来添加的时间
- 06-Jan-2023:在新窗口中打开Google Maps链接
- 06-Jan-2023:解决了几个报告的错误 /意外行为
- 07-Jan-20123:更改了一些UI语言。 (我很抱歉,英语不是我的母语)
V0.0.2:
- 23-DEC-2022:将结果添加到Web界面
- 23-DEC-2022:默认情况下已禁用“注释”字符串
- 2022年12月23日:尝试确定收到的数据包是实际的HAB数据包还是无效或未知数据包
- 23-DEC-2022:更改Webinterface中“测试模式”的措辞
V0.0.1:
- 19-DEC-2022:更改为XYZ版本编号
- 19日至2022年:从设置
- 19日至2022年:OLED显示器现在将显示频率更新
- 19-DEC-2022:添加了一种更改WebInterface中Devflag的方法
V0.1ß:
- 2012年12月18日:初始版本,在Facebook HAB-NL组中发布
正在进行中
该软件正在进行中。我做了自己的气球。使用它自身的风险,没有保证。让我知道您是否觉得它有用,并且一如既往,请不要忘记玩得开心。
Roel。