PointNeXt
1.0.0
官方Pytorch实施以下论文:
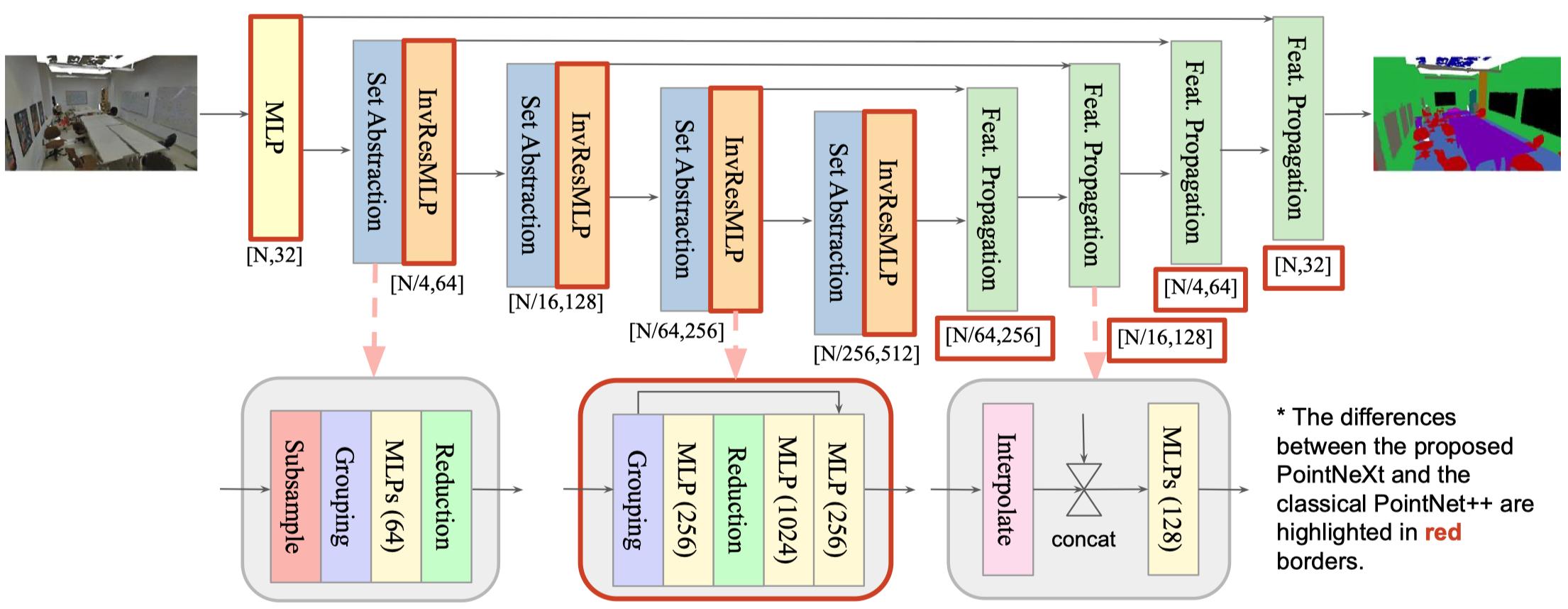
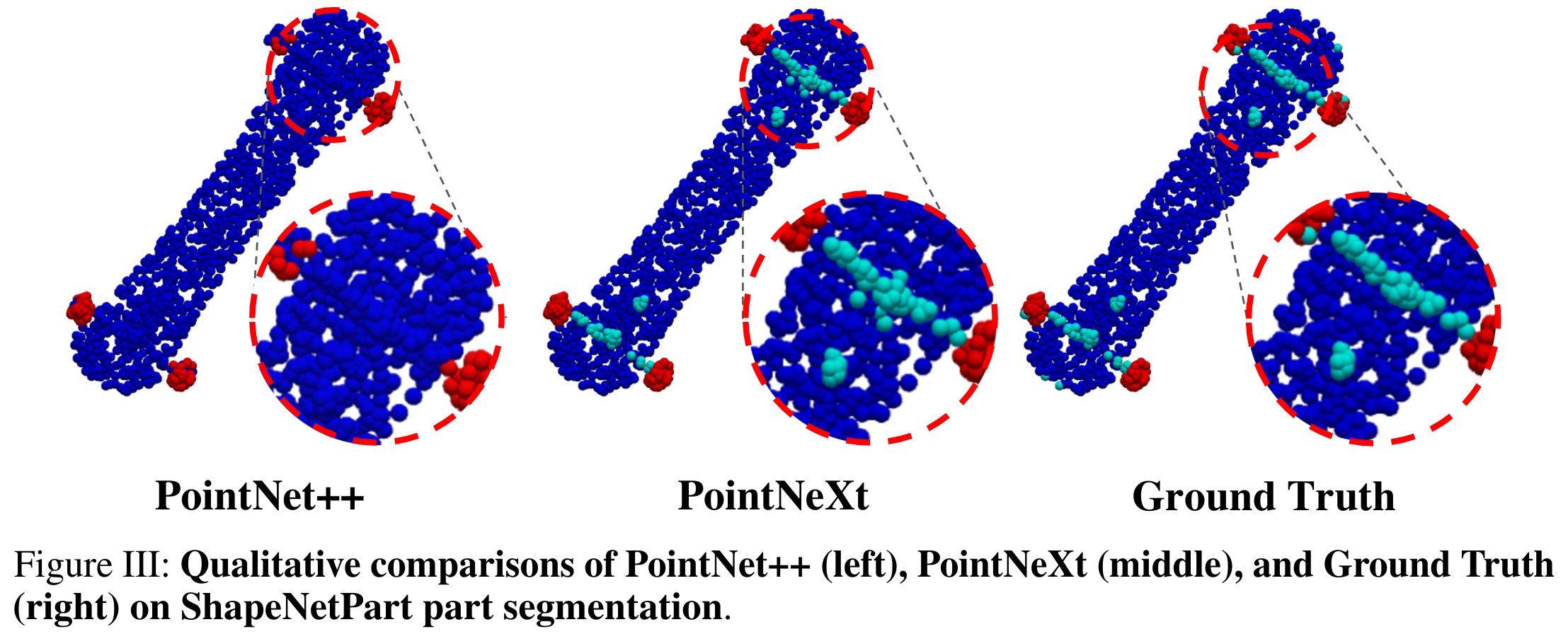
PointNext:通过改进的培训和缩放策略重新访问PointNet ++
Guocheng Qian,Yuchen Li,Houwen Peng,Jinjie Mai,Hasan Hammoud,Mohamed Elhoseiny,Bernard Ghanem
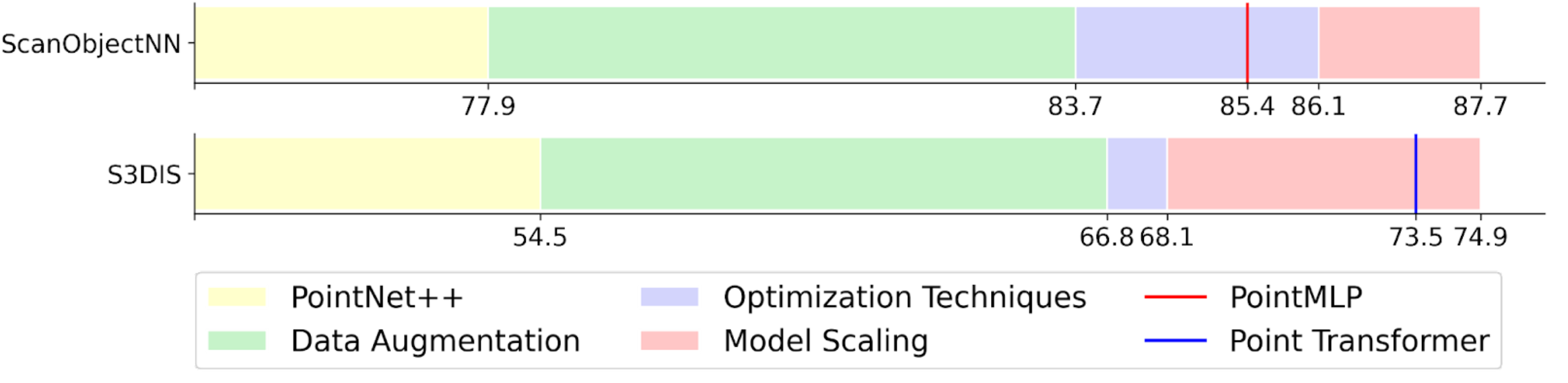
TL; DR:我们提出了改进的培训和模型缩放策略,以将PointNet ++提升到最新水平。带有建议的模型缩放的PointNet ++被命名为PointNext,是PointNet的下一个版本。
在PointNext项目中,我们为基于点的方法(即开放点)提出了一个新的灵活代码库。开放点和其他库之间的最大区别在于,我们更多地专注于可重复性和公平的基准测试。
可扩展性:支持许多代表性网络以了解点云理解,例如PointNet,DGCNN,DeepGCN,PointNet ++,Assanet,PointMLP和我们的PointNext 。可以根据我们的框架轻松构建更多网络,因为OpenPoints支持了广泛的基本操作,包括图形卷积,自我注意,最远的点采样,球查询等。
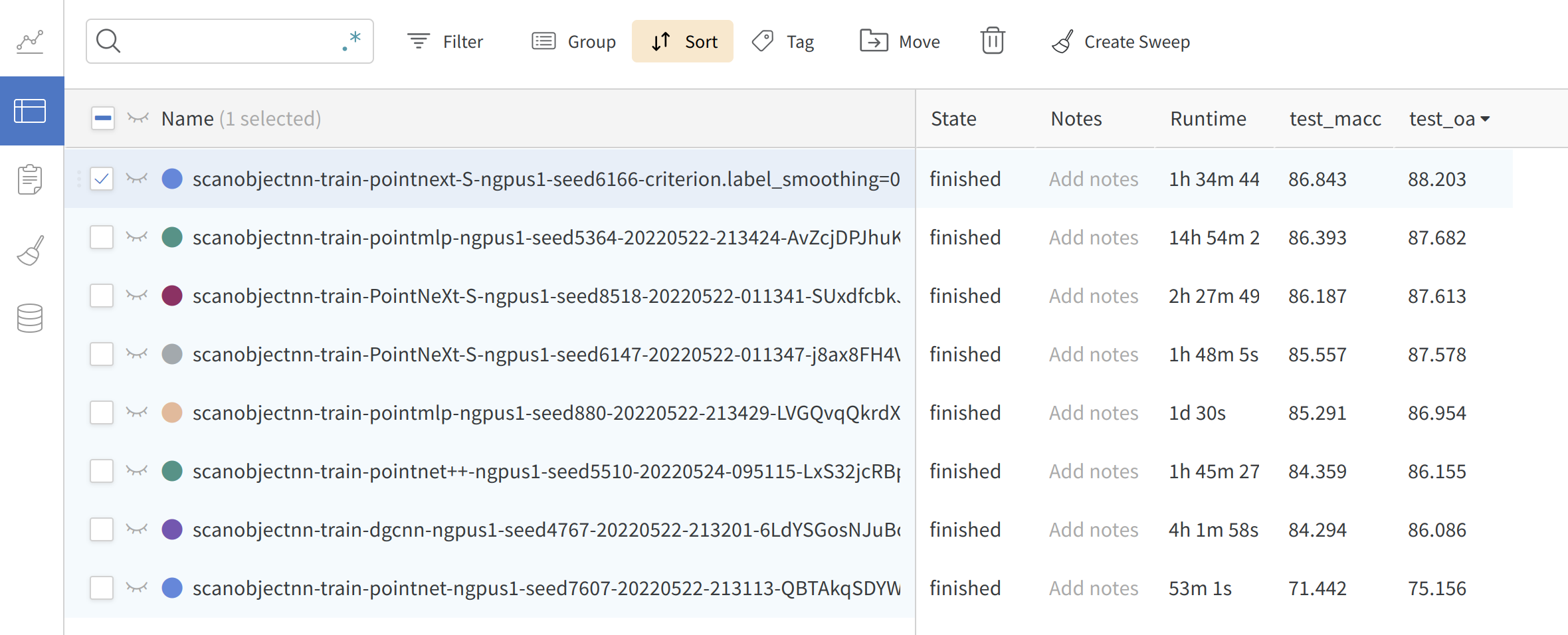
可重复性:所有实施的模型均受至少三次的各种任务培训。 PointNext纸张提供了平均值±STD。预验证的模型和日志可用。
公平的基准测试:在PointNext中,我们发现绩效增长的很大一部分是由于培训策略所致。在开放点中,所有模型均经过改进的培训策略的培训,并且所有模型的准确性都比原始报告的值高得多。
易用性:构建模型,优化器,调度程序,损耗功能和数据加载器从CFG轻松。通过简单地更改cfg**.yaml文件来训练和验证各种任务的不同模型。
model = build_model_from_cfg(cfg.model)
criterion = build_criterion_from_cfg(cfg.criterion_args)
这是pointnet.yaml (点网模型的模型配置)的示例:
model :
NAME : BaseCls
encoder_args :
NAME : PointNetEncoder
in_channels : 4
cls_args :
NAME : ClsHead
num_classes : 15
in_channels : 1024
mlps : [ 512 , 256 ]
norm_args :
norm : 'bn1d'在线记录:支持WandB随时随地检查结果。只需在您的命令中设置wandb.use_wandb=True即可。
我们提供一个简单的bash文件来安装环境:
git clone --recurse-submodules [email protected]:guochengqian/PointNeXt.git
cd PointNeXt
source update.sh
source install.sh
需要CUDA-11.3。如果使用了其他CUDA版本,请修改install.sh 。有关详细信息,请参见安装。
检查我们的在线文档以获取详细说明。
简短的指示:所有实验遵循简单的规则进行训练和测试:
CUDA_VISIBLE_DEVICES=$GPUs python examples/$task_folder/main.py --cfg $cfg $kwargs
mode=test, --pretrained_path $pretrained_path 。 请参阅模型动物园。
本文提供了更多示例。
该库的灵感来自Pytorch-image-Models和MMCV。
如果您发现PointNext或OpenPoints代码库有用,请引用:
@InProceedings{qian2022pointnext,
title = {PointNeXt: Revisiting PointNet++ with Improved Training and Scaling Strategies},
author = {Qian, Guocheng and Li, Yuchen and Peng, Houwen and Mai, Jinjie and Hammoud, Hasan and Elhoseiny, Mohamed and Ghanem, Bernard},
booktitle=Advances in Neural Information Processing Systems (NeurIPS),
year = {2022},
}

