VisionGram
VisionGram是一个基于Web的应用程序,可让您从网络摄像头发送照片,麦克风的语音消息或GPS的位置,VisionGram只需单击即可完成所有操作。 VisionGram易于使用,快速安全。您可以通过浏览器和Internet连接的任何设备访问它。

法律免责声明请阅读!
我,创建者以及与该计划的开发和生产相关的所有人员概不负责该软件造成的任何动作和损害。您承担行动的全部责任,并承认该软件仅出于教育目的而创建。该软件的预期目的不得恶意使用,也不应在您没有拥有或明确操作和使用此程序的任何系统上使用。通过使用此软件,您将自动同意上述。
执照
该项目是根据MIT许可证获得许可的 - 有关详细信息,请参见许可证文件
编译指南:
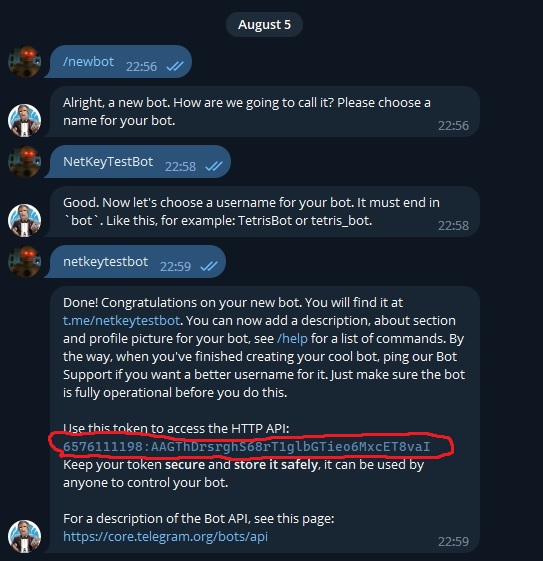
- 转到@botfather机器人并创建自己的机器人。您需要保存令牌和机器人名称。
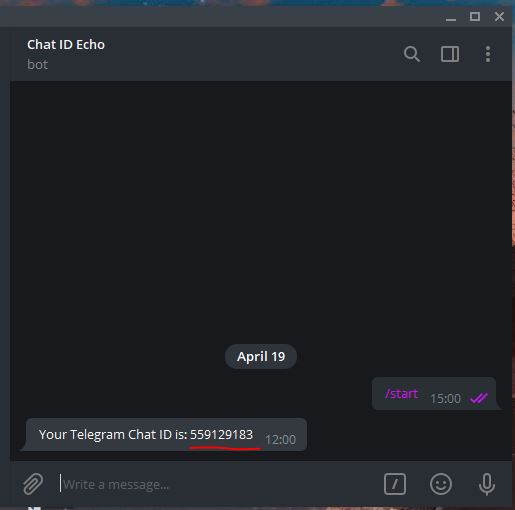
- 现在您需要获得聊天ID。为此,请转到下一个bot @chatid_echo_bot并保存ID。
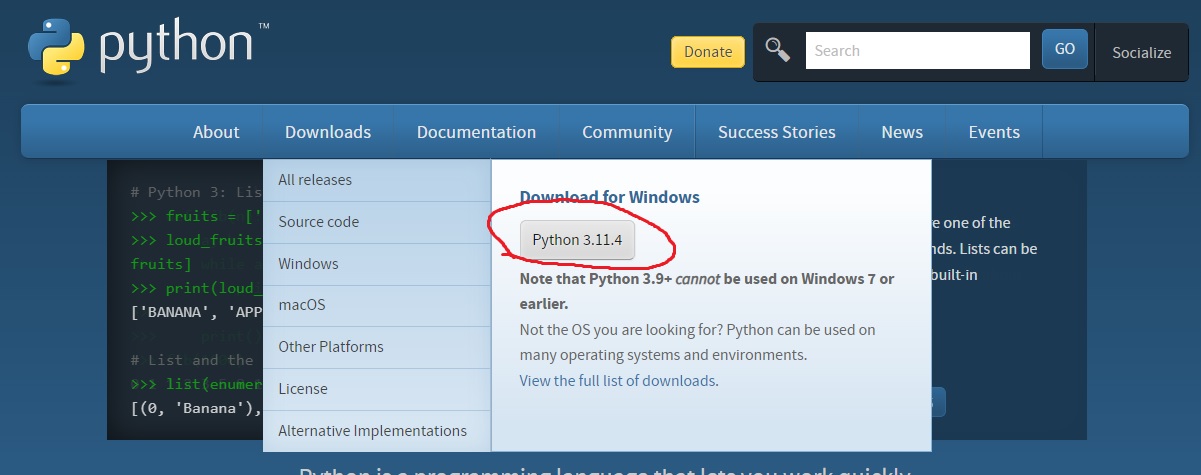
- 现在您需要下载Python
- 下载此程序的源代码。
- 将项目文件夹解压缩到您的桌面。
- 安装要求打开命令提示(CMD)或终端。导航到使用cd命令位于您的需求的目录.txt文件的位置。例如:CD C: USER USER downloads VisionGram sumistry.txt运行以下命令以安装依赖项:PIP install -r unignts.txt
- 通过IDE或记事本打开App.py文件。
- 更改netkey.py中的令牌和chat_id的值
- 通过IDE或记事本打开模板/index.html文件。
- 在index.html中更改令牌和chat_id的值
- Python代码线配置

- HTML代码行配置

- 将您的令牌从机器人和您之前收到的chatid中插入。
- 按CTRL + S保存并启动名为App.py的文件以运行网络面板。
- 您可以使用NGrok托管Localhost,并将收到的URL发送给某人。
- 单击网页上的按钮后,数据将从机器人发送到您的电报帐户。
捐:
BTC: bc1q5exw2v9sa0yktp2t7xnq8ma2xpn5a29s7w283y
ETH: 0x8d797249170d263B959A3c688D8456adBcfBC319
XMRT: 0xF978FE35d00A201eB48aB3908993e14f312001a2


