open3d_slam
1.0.0
open3d_slam 是一个用于 ROS 集成的 SLAM 的 C++ (cpp) 库。
主要联系人: Edo Jelavic ([email protected])
作者:埃多·耶拉维克、朱利安·努伯特、马可·哈特
海报和摘要:链接
文档:链接
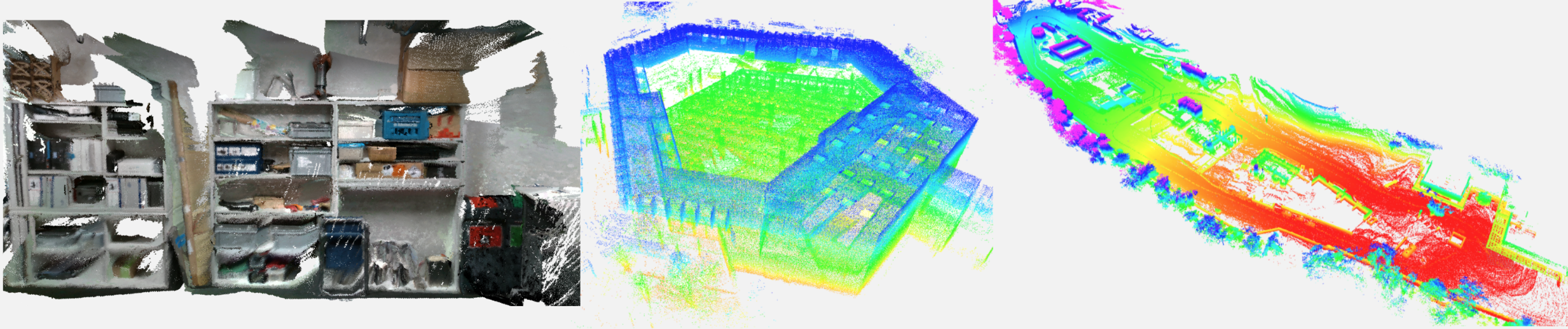
open3d_slam 和其他 SLAM 库之间的主要区别在于 open3d_slam 设计简单并用于教育目的。事实上,open3d_slam 仅使用其基本形式的成熟算法。我们希望这能让新人更容易进入这个领域。它适用于点云,不需要 IMU 等额外输入。 Open3D_slam 可以从头开始构建地图或在给定地图中进行本地化。给定的地图也可以通过新的测量进行扩展。
我们的实现基于 Open3D,这是一个维护良好且高性能的 3D 数据处理库。
文档和示例数据集可以在此处找到 open3d_slam 文档。
我们为 Open3D 提供了一个 catkin 包装器,以便您可以在 ROS 项目中轻松使用 Open3D。请参阅 open3d_catkin/README.md 中的文档。
如果您发现这项工作有用,或将其用于您的研究,请考虑引用相应的工作:
@inproceedings{jelavic2022open3d,
title={Open3D SLAM: Point Cloud Based Mapping and Localization for Education},
author={Jelavic, Edo and Nubert, Julian and Hutter, Marco},
booktitle={Robotic Perception and Mapping: Emerging Techniques, ICRA 2022 Workshop},
pages={24},
year={2022},
organization={ETH Zurich, Robotic Systems Lab}
}


