diffusion jax
1.0.0
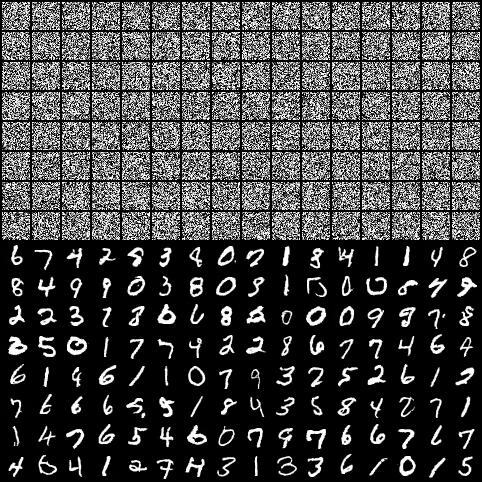
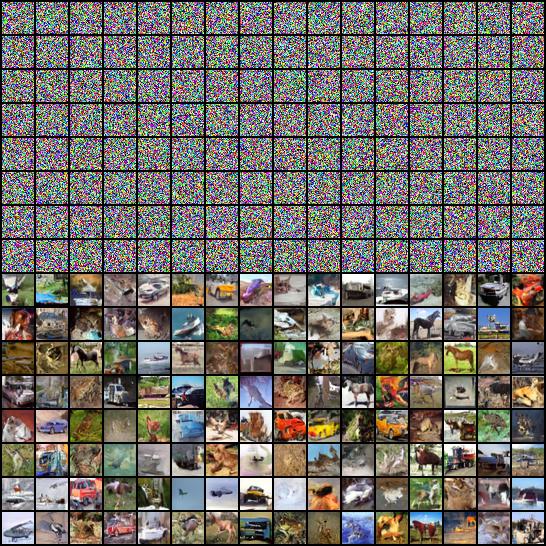
Este repositorio sirve como una simple base de código para realizar la experimentación con enfoques de difusión originales (DDIM y DDPM), y no difusión estable, que se puede agregar fácilmente. Específicamente, el código es fácil de leer y lo suficientemente flexible como para ser modificado para un uso propio. Esta implementación incluye muestreo DDIM y DDPM escrito utilizando primitivas Jax para la compilación JIT a diferencia del repositorio de difusión basado en Jax comúnmente encontrado.
pip install - r requirements . txtSi encuentra problemas con la instalación de Jax, consulte su documentación.
python train_unet.py
--loss_type pred_v
--min_snr_gamma 5.0
--timesteps 1000
--sampling_steps 250
--seed 3867
--save_every_k 5
--max_to_keep 5
--epochs 1000
--batch_size 128
--num_workers 0
--gradient_accummulation_steps 1
--pin_memory True
--learning_rate 0.0001
--weight_decay 0.0001
--max_ema_decay 0.9999
--min_ema_decay 0.0
--ema_decay_power 0.66667
--ema_inv_gamma 1
--start_ema_update_after 100
--update_ema_every 10
--result_path ./unet_cifar10
--dataset cifar10
--root_folder ../data
--beta_schedule sigmoid
--dim 64
--dim_mults 1,2,4,8
--resnet_block_groups 8
--learned_variance False
--clear_gpu_cache False
Nota, se usa el punto de control y, por lo tanto, puede continuar entrenando desde un punto de control si se detiene abruptamente.
Para obtener más información, eche un vistazo a Train.py en SRC/Utils y el cuaderno Jupyter proporcionado en NBS .
import jax
import numpy as np
from src import Unet
# create empty values for initialization --- note the first dimension is being vmapped over.
x = np . ones ([ 1 , 32 , 32 , 3 ])
t = np . ones ([ 1 ])
# seed
key = jax . random . PRNGKey ( 42 )
# initialize model
params = model . init ( key , x , t )[ 'params' ]
# usage
score = model . apply ({ 'params' : params }, x , t )
import equinox as eqx
from src import linear_schedule , ddim_sample , ddpm_sample , get_var_params , get_pred_fn , get_time_pairs
loss_type = "pred_v"
timesteps = 1000
sampling_steps = 250
# variance scheduler
betas = linear_schedule ( timesteps )
var_params = get_var_params ( betas )
# predict function: x0, noise, and v
pred_fn = get_pred_fn ( loss_type )
# compile these functions
ddpm_sample_fn = eqx . filter_jit ( ddpm_sample )
ddim_sample_fn = eqx . filter_jit ( ddim_sample )
# ddpm-sampling
x_ddpm = ddpm_sample_fn (
params ,
model . apply ,
pred_fn ,
x ,
np . arange ( timesteps ),
key ,
var_params ,
timesteps
)
# ddim-sampling
time_pairs = get_time_pairs ( timesteps , sampling_steps )
x_ddim = ddim_sample_fn (
params ,
model . apply ,
pred_fn ,
x ,
time_pairs ,
key ,
var_params ,
sampling_steps ,
0.0
)Una función común de Jax Util es jax.pmap . Para facilitar el uso, esta biblioteca aprovecha las funciones de utilidad de equinoccio. Tenga en cuenta que JIT también se aplica cuando se usa PMAP .
from src import shard , unshard
from flax . jax_utils import replicate
# batch_size x image_shape
x = np . random . ones ([ 256 , 32 , 32 , 3 ])
# num_gpus x (256 // num_gpus) x 32 x 32 x 3
x = shard ( x )
# replicate params for each gpu
replicate_params = replicate ( params )
# Specifying None means the variable is static while a number indicates the axis being mapped over.
ddim_sample_fn = eqx . filter_pmap ( ddim_sample , in_axes = ( 0 , None , None , 0 , None , None , None , None , None ))
x_ddim = ddim_sample_fn (
replicate_params ,
model . apply ,
pred_fn ,
x ,
time_pairs ,
key ,
var_params ,
sampling_steps ,
0.0
)
# batch_size x image_shape
x_ddim = unshard ( x_ddim )El punto de control del modelo y la gestión de los puntos de control del modelo se realizan a través de ORBAX.
from src import create_checkpoint_manager , restore_model
FOLDER = "./unet_pred_v/ckpts"
# create manager for reloading ckpt
ckpt_manager = create_checkpoint_manager ( FOLDER )
# specify None for the latest step
ckpt = restore_model ( ckpt_manager , latest_step = None )
# available keys; ckpt is a dict
ckpt [ 'config' ]
ckpt [ 'params' ]
ckpt [ 'ema_params' ]
ckpt [ 'opt_state' ]
# you can also specify a target dict for proper reloading
my_ckpt = {
'params' : params ,
'opt_state' : opt_state ,
'ema_params' : ema_params ,
'config' : config
}
my_ckpt = restore_model ( ckpt_manager , target = my_ckpt , latest_step = None ) import numpy as np
import equinox as eqx
from src import ddim_sample_visual , create_gifs , Unet , get_time_pairs , get_pred_fn
# noise
x = np . random . normal ( 0 , 1 , size = [ 16 , 32 , 32 , 3 ])
# Using the ckpt from above
config = my_ckpt [ 'config' ]
pred_fn = get_pred_fn ( config [ 'loss_type' ])
key = config [ 'key' ]
timesteps = config [ 'timesteps' ]
sampling_steps = config [ 'sampling_steps' ]
# use specify arguments from config
model = Unet (...)
# time_pairs for ddim
time_pairs = get_time_pairs ( timesteps , sampling_steps )
ddim_sample_fn = eqx . filter_jit ( ddim_sample_visual )
# perform generation where the x at different timesteps are returned as well
x_ddim , x_over_time = ddim_sample_fn (
my_ckpt [ 'ema_params' ],
model . apply ,
pred_fn ,
x ,
time_pairs ,
key ,
config [ 'var_params' ],
steps = sampling_steps ,
eta = 0.0 # or config['eta']
)
# create animations: you can upscale the images
frames = 100
create_gifs (
x_over_time ,
duration = 1 / frames ,
folder = "./example_gifs/" ,
image_size = ( 256 , 256 , 3 ),
num_images = 5 ,
) La actualización de EMA adaptada de Yiyixuxu se realiza utilizando la siguiente ecuación


