esp32 lora water level meter
1.0.0
Automated measurement of a well's water level with LoRa transmission, based on ESP32.
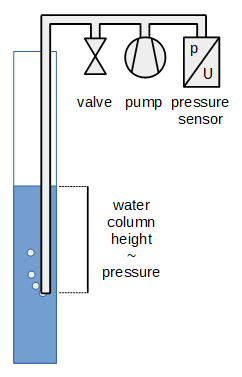
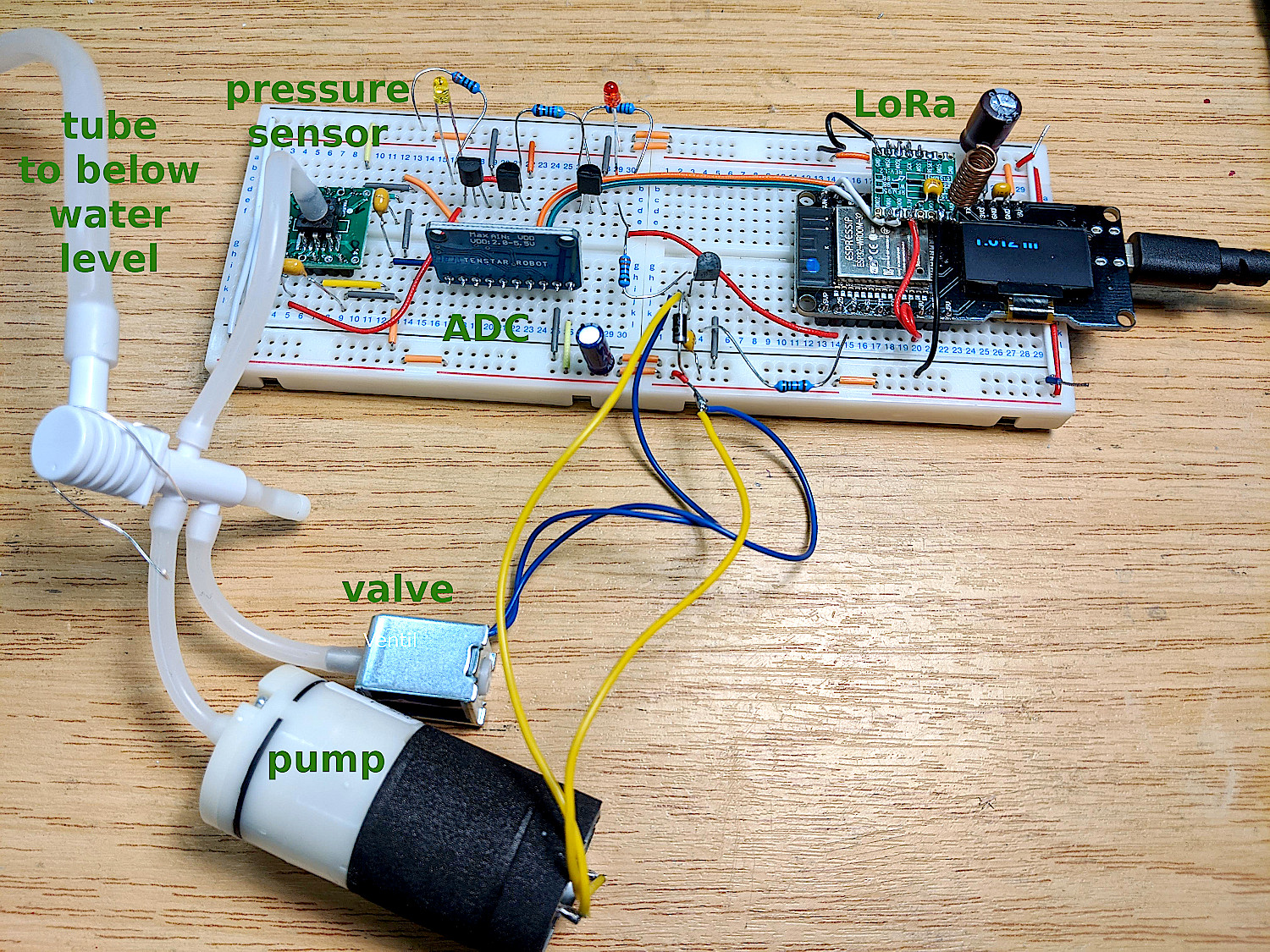
A tube is fixed in the fountain with its end below the lowest expected water level. A pump blows air into the tube until it bubbles out of the lower end. Then, the air pressure in the tube will be proportional to the forced-out water column height. The pump must be strong enough for the highest expected water level.
The idea for this principle is taken from this discussion thread.
A one-way valve may be used in the tube to avoid intrusion of dirt and to shorten the required pumping duration to prolong battery life. Then, its placement must ensure that there is no permanent pressure at the sensor which could cause damage over time and also prevents measuring the zero pressure. The pressure loss caused by this valve must be compensated in the calcuation, too.
Pump, valve and pressure sensor can be taken from a cheap blood pressure monitor. An ADS1115 16 bit ADC is used to measure the small sensor voltage of some millivolts. An ESP32 µC controls the measurement procedure and transmits the result.
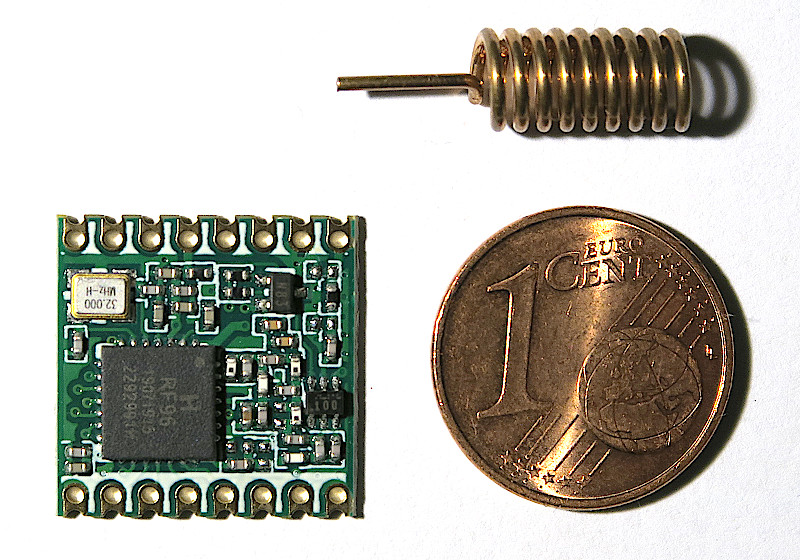
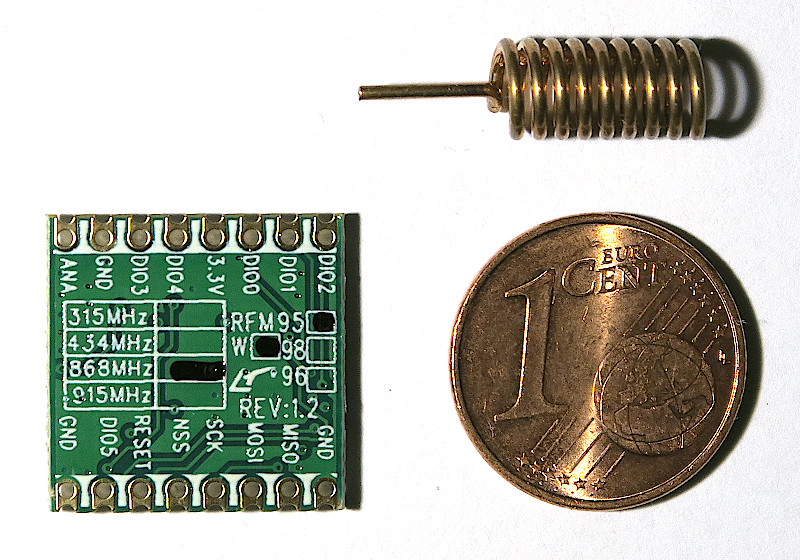
LoRa module: HopeRF RFM95W, SX1276 compatible, and helix antenna for 868 MHz
Front / Back horizontally flipped over:
Library: ttn-esp32 is really easy to use and should have fewer timing problems on ESP32 than Arduino LMIC, since it is based on ESP-IDF/FreeRTOS tasks. Although it needs ESP-IDF, it can still be used together with the Arduino libs because these are also based on ESP-IDF. A lib_compat_mode = off in platform.ini enables its usage with framework arduino.
Saving and restoring the LoRa state over deep sleep in RTC memory is done by TTNSession.
Byte 0 and 1 contain the water level in millimeter as a 16 bit integer, high byte first. Byte 2 and 3 contain the battery voltage in millivolt as a 16 bit integer, high byte first. These 16 bit integers are encoded as two's complement if negative, which might appear for the water level.
TTN payload format decoder see ttn_decoder.js.
It decodes 03 E0 0F 10 to
{
"batteryVolt": 3.856,
"levelMeter": 0.992
}
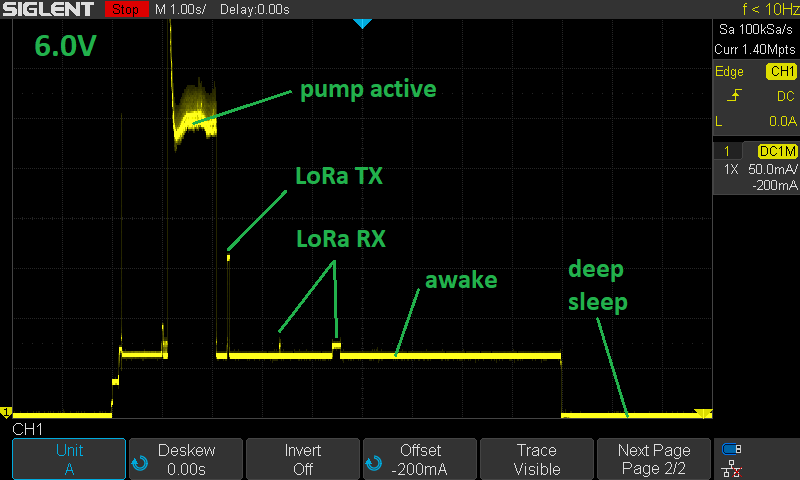
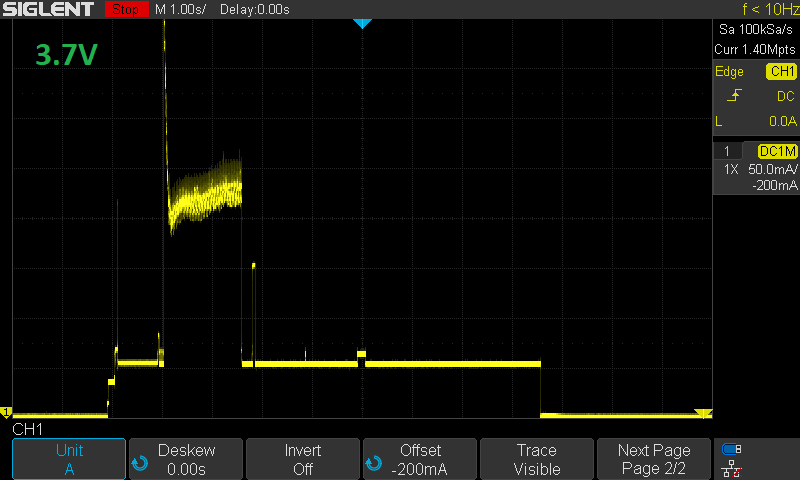
Power consumption is critical for battery operation. The goal is having to access the battery only once a year while the well's level is measured every 5 minutes.
After lots of optimization, power consumption is finally dominated by the pump and the valve, although they are only active for few seconds in each cycle. This active phase has been cut down to the absolute minimum that can still deliver reliable measurements. It might further be improved with a one-way valve in the tube that keeps the air in, but still releases the pressure from the sensor.
To optimize the deep sleep current, an EzSBC ESP32-01 board has been used, which leads to really great 12 µA. This board behaved by far best of all tested ones, see esp32-power-consumption-test. To achieve this low current, the peripheral circuits for measurement and LoRa are supplied by a separate 3.3 V voltage regulator that can be switched on and off by software. Using regular GPIO pins for SPI and the other outputs failed, since they cannot be isolated or pulled low during deep sleep. This lead to considerable leakage currents. However, this is possible for the RTC-powered GPIO pins. The software prepares them for deep sleep by isolating or pulling low (hold). Which pin behaves in which way is not easily obvious.
This is one measurement cycle with LoRa transmission (without join):
Battery life estimation see battery-consumption.ods.
Optimized prototype:
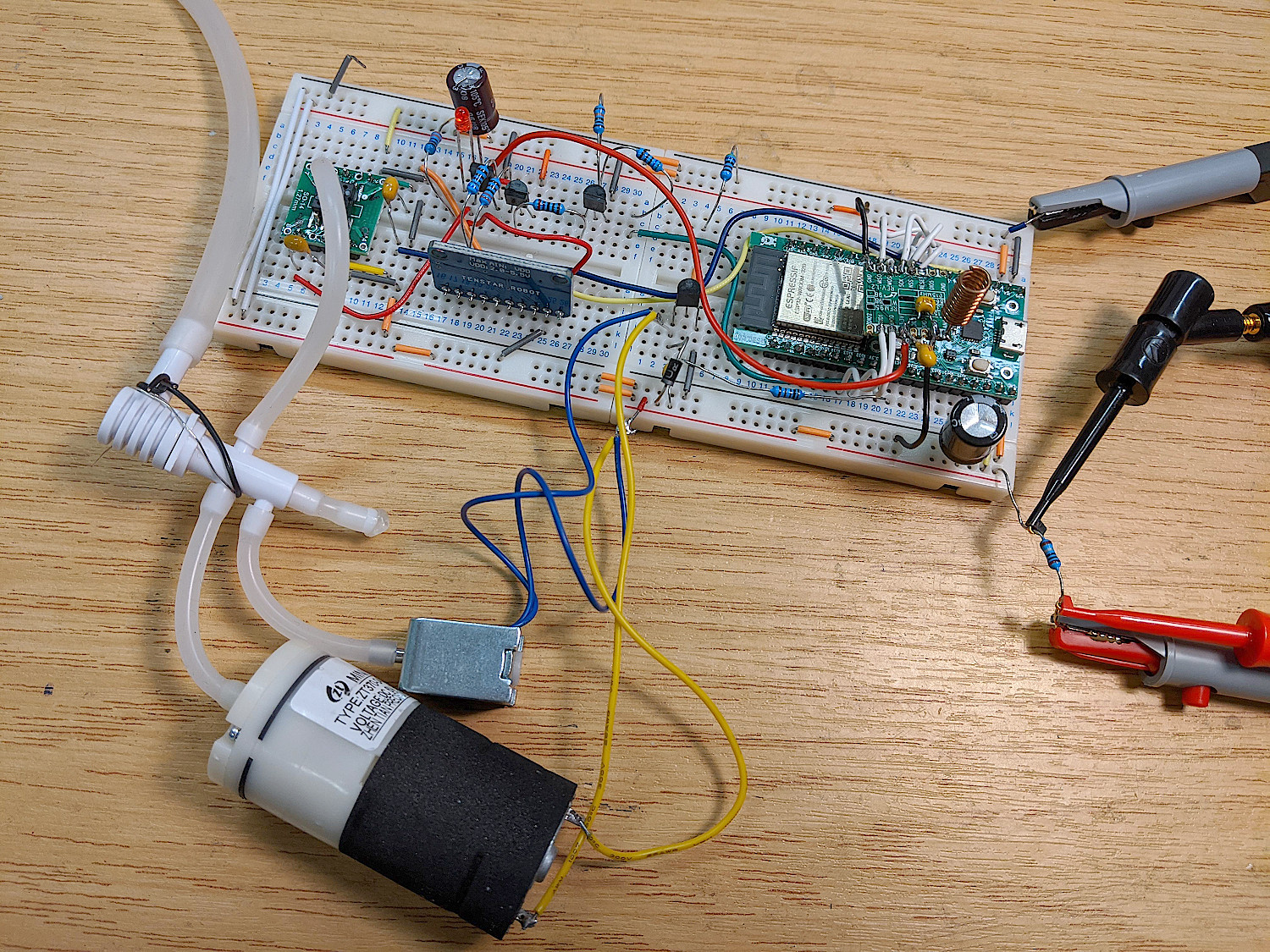
To monitor the remaining battery voltage, it is fed into another free channel of the ADC using a voltage divider. It is powered from the switchable peripherals voltage before the regulator to avoid unnecessary battery drain. The transistor switch causes a voltage loss of 30 to 40 mV which could be (but is not) compensated in the software as well as the resistor deviations.
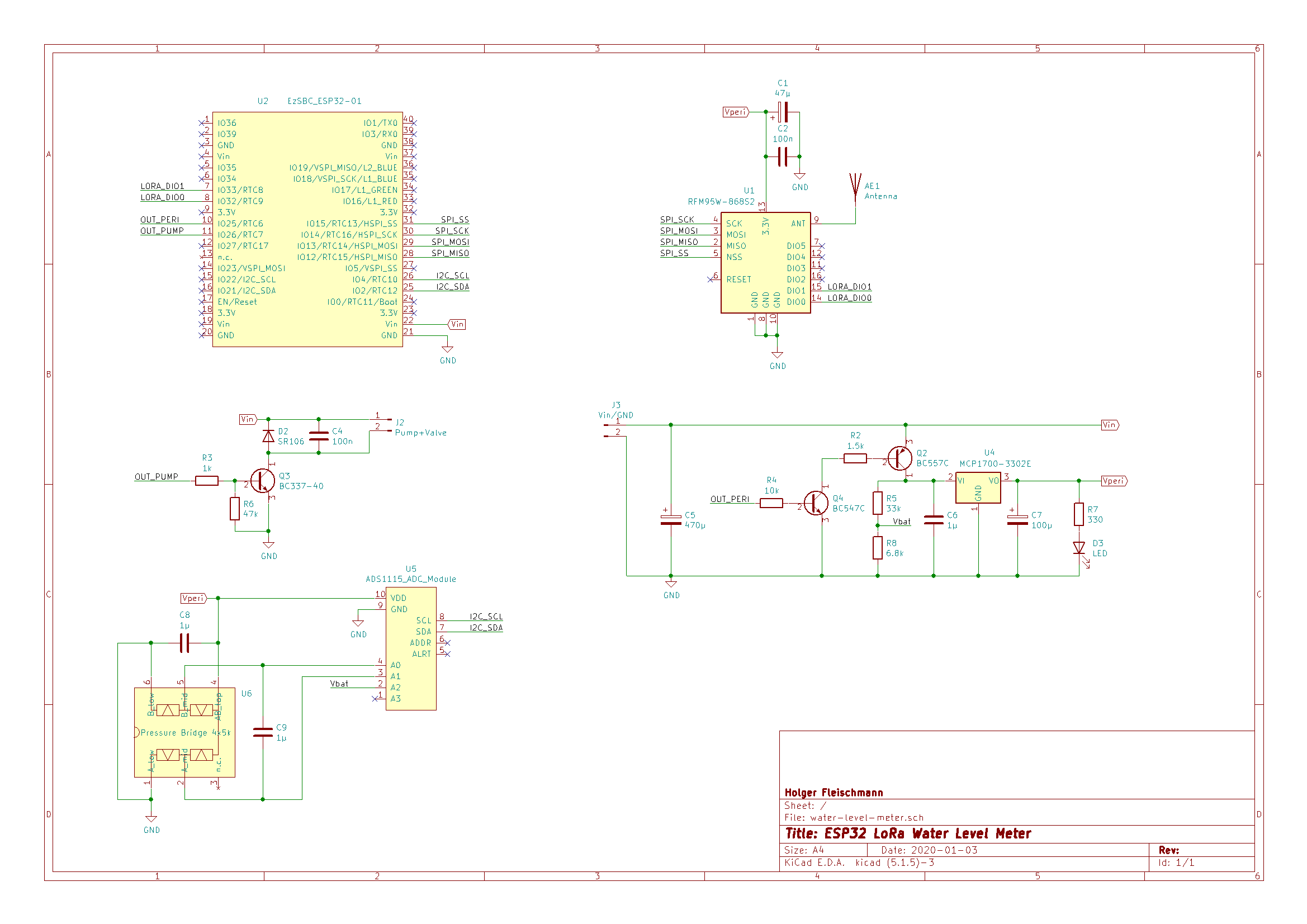
KiCad circuit diagram: